

7.4. Некоторые мнемонические правила электротехники.
Для понимания схем и рисунков, относящихся к электродвигателям, необходимо вспомнить некоторые мнемонические правила.
“Правило стрелы” (обозначение направления тока в проводнике перпендикулярном плоскости чертежа). Крестиком обозначают ток, текущий от нас (оперение стрелы), точкой – ток, текущий к нам.
“Правило буравчика”: если вращать буравчик по току, то поступательное движение буравчика укажет направление магнитного потока.
“Правило правой руки”: если расположить ладонь правой руки так, что магнитный поток “входит” в ладонь, а ток течет в направлении пальцев, то сила Ампера направлена вдоль большого пальца.
7.5. Электроприводы переменного тока.
Наиболее распространенными электродвигателями промышленных установок являются трехфазные асинхронные двигатели. Конструкция двигателя показана на рис. 7.4. На статоре (неподвижной части двигателя) расположены три обмотки со сдвигом на 120 градусов. Ротор имеет конфигурацию, называемую “беличье колесо”. Никаких электрических соединений с внешним миром ротор не имеет.
Статор
Ротор
Рис. 7.4. Конструкция трехфазного асинхронного двигателя
В обмотки статора подается трехфазное питание, при этом суммарный вектор магнитного поля вращается. В проводнике ротора наводятся токи и создается вращающий момент. Механическая характеристика двигателя показывает, что до некоторого критического момента нагрузки М двигатель будет устойчиво работать при скорости ω1, несколько меньшей скорости вращения поля ω0. Эта разность характеризуется так называемым скольжением S.
Главное достоинство трехфазных асинхронных двигателей – простота конструкции, легкость текущего обслуживания и высокая надежность. Приводы с таким двигателем – основной тип нерегулируемых электроприводов.
Указанные достоинства асинхронных трехфазных двигателей побудили конструкторов электроприводов искать пути создания регулируемых приводов с таким двигателем (ранее управляемые электроприводы строились на базе двигателя постоянного тока).
Исследования показали, что для обеспечения приемлемых для данной мощности динамических характеристик привода требуется варьировать частоту и ток питания обмоток статора. Организация такого привода показана на рис. 7.5. Здесь СУ – система управления, ТГ – тахогенератор (датчик скорости вращения, маломощная электрическая машина специального исполнения на валу двигателя). Блок СУ представляет собой сложное по схеме электронное устройство с использованием тиристоров, транзисторов, микросхем и других электронных компонентов. Еще 30-40 лет назад стоимость и ненадежность СУ сводили на нет преимущества асинхронного двигателя. Однако, стремительный прогресс электроники в последней трети двадцатого века позволил создавать конкурентоспособные электроприводы такого типа. В настоящее время в новых разработках эти приводы следует рассматривать как основной вариант (в оборудовании прежних лет выпуска еще сейчас работают электроприводы с двигателем постоянного тока).
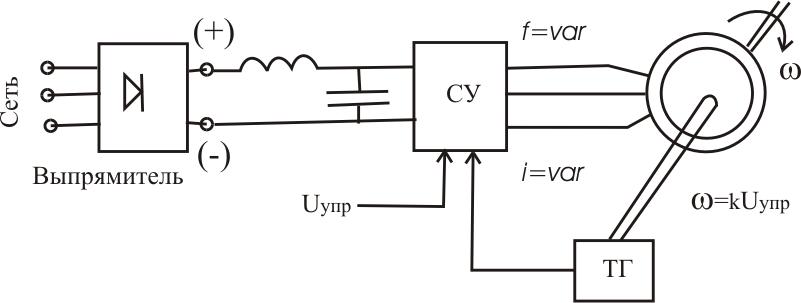
Рис 7.5. Организация управляемого электропривода с асинхронным двигателем