

Введение.
Задача синтеза системы автоматического управления (САУ) заключается в выборе такой её структура, параметров, характеристик и способов их реализации, которые при заданных ограничениях наилучшим образом удовлетворяют требованиям, предъявленным к системе.
Для синтеза САУ необходимо выполнить ряд следующих задач:
-
Построение структурной схемы нескорректированной системы и определение передаточных функций её звеньев.
-
Оценка точности и анализ качества исходной системы (запаса устойчивости и быстродействия) с использованием пакета Control System Toolbox.
-
Построение желаемой ЛАЧХ.
-
Определение желаемых передаточных функций разомкнутой и замкнутой системы. Оценка показателей качества желаемой системы с использованием пакета MatLab.
-
Синтез последовательного корректирующего устройства (регулятора).
-
Реализация корректирующего устройства в виде аналогового и цифрового регуляторов
-
Оценка точности и качества скорректированной системы с учётом ограничений выходного сигнала регулятора путём моделирования с помощью пакета SIMULINK.
-
Параметрическая настройка системы стабилизации с учётом ограничений на управление с применением приложения Nonlinear Control Design.
-
Построение и описание функциональной схемы скорректированной системы (с приведением параметров САУ и её показателей качества).
-
Построение структурной схемы нескорректированной системы и определение передаточных функций её звеньев.
Построим нескорректированную систему на основе функциональной схемы (рис. 1):
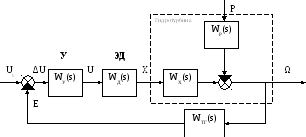
ТГ
Рис 2. Структурная схема нескорректированной системы.
Определим передаточные функции звеньев системы на основе уравнений приведённых в пункте «Задание», где передаточная функция есть отношение выходной величины к входной:
Определим передаточную функцию электронного усилителя используя уравнение 1.:
![]() (6)
(6)
Определим передаточную функцию электродвигателя используя уравнение 5:
![]() (7)
(7)
Определим передаточную функцию от перемещения заслонки используя уравнение 1:
![]() (8)
(8)
Определим передаточную функцию от мощности, потребляемой от генератора (внешнее возмущение) используя уравнение 1:
![]() (9)
(9)
Тогда передаточная функция гидротурбины будет иметь вид:
![]() (10)
(10)
Определим передаточную функцию тахогенератора используя уравнение 2:
![]() (11)
(11)
Найдём передаточную функцию разомкнутой системы исходя из передаточных функций её звеньев (уравнения 6-11) и структурной схемы нескорректированной системы (рис. 2):
![]() (12)
(12)
Проверим электродвигатель на колебательность:
Если 4ТЯ<ТМ
4*0,003<0,018
0,012<0,018, тогда двигатель есть апериодическое звено 2-ого порядка, и функция разомкнутой системы принимает вид:
![]() (13)
(13)
где К=![]() =90*0,02*6*1=10,8
=90*0,02*6*1=10,8
Т0=0,11
ТМ=0,018
ТЯ=0,003
Определим Т1 и Т2 исходя из уравнений 12 и 13:
ТМ*ТЯ=0,018*0,003=5,4*10-5=Т1*Т2
Т1+Т2=0,018=ТМ
(ТМ-Т2)Т2=ТЯТМ
ТМТ2-Т22= ТЯТМ,
Тогда Т22-ТМТ2+ТЯТМ=0
Получившееся уравнение называют квадратным уравнением, для его решения можно воспользоваться специальными формулами:
ax2+bx+c=0 (14)
![]() (15)
(15)
Тогда b=-TM, a=1, c= ТЯТМ. (16)
Исходя из уравнений 14, 15 и 16 найдём Т1 и Т2:
Т2=ТМ/2±![]()
Т2=0,009±![]() =0,009±
=0,009±![]() =0,009±
=0,009±![]() ≈0,009±0,0052
≈0,009±0,0052
Т2(1)=0,009-0,0052=0,0038
Т2(2)=0,009+0,0052=0,0142
Т1(1)=ТМ-Т2(1)=0,018-0,0038=0,0142
Т1(2)=ТМ-Т2(2)=0,018-0,0142=0,0038
Поскольку ТМ*ТЯ=0,018*0,003=5,4*10-5=Т1*Т2, то Т1=0,0038 Т2=0,0142,
тогда функция разомкнутой системы:
![]() (17)
(17)