

2.3 Определение числа ступеней в приводе.
После расчета-обоснования технической характеристики станка должна быть получена величина диапазона регулирования
![]()
Учитывая свойства геометрического ряда, и считая предварительно, что последний член ряда должен быть приблизительно равен nz =nmax, а первый член ряда – n1= nmin , можно записать
![]()
Решая это уравнение относительно Z, и учитывая выражение (1.2), получим
![]() (2.1)
(2.1)
Получив рассчитанное по формуле (2.1) значение, следует округлить его до ближайшей большей целой величины, чтобы ряд охватывал весь требуемый диапазон регулирования.
Затем необходимо,
воспользовавшись таблицей 2.1 (ГОСТ
8032-56), выписать ту часть стандартного
ряда с выбранным знаменателем
![]() ,
которая укладывается в интервал от nmin
до
nmax
с учетом
количества ступеней Z,
полученного расчетом:
,
которая укладывается в интервал от nmin
до
nmax
с учетом
количества ступеней Z,
полученного расчетом:
n1; n2; n3; …… ni; ni+1; …….nz-1; nz
После этого можно разрабатывать кинематическую схему привода, который будет обеспечивать требуемое количество ступеней, а также и конкретные значения частот вращения на каждой ступени.
2.4 Применение групповых передач в ступенчато регулируемом приводе.
Е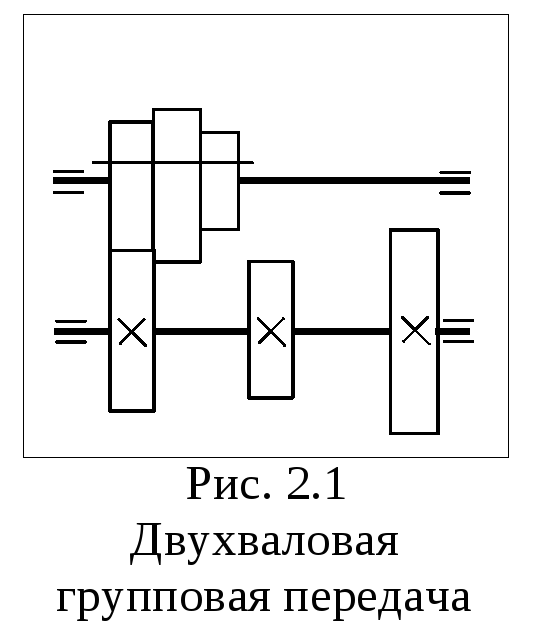 сли
привод состоит всего из двух валов, то
для того, чтобы обеспечить Z
различных ступеней скорости, необходимо
иметь Z
переключаемых передач с различными
передаточными отношениями между этими
валами. Например, на рис.2.1 изображена
двухваловая переключаемая передача,
состоящая из передвижного блока на
первом валу и трех неподвижных зубчатых
колес на втором валу. Такой привод может
обеспечить три различные скорости
(ступени). В принципе с помощью двухваловой
передачи можно получить любое количество
ступеней Z,
однако для этого необходимо иметь Z
различных передач (передаточных
отношений) между валами. При Z
больше четырех валы двухваловой передачи
получаются слишком длинными, количество
пар зубчатых колес должно быть равно Z
, и габарит передачи резко возрастает.
сли
привод состоит всего из двух валов, то
для того, чтобы обеспечить Z
различных ступеней скорости, необходимо
иметь Z
переключаемых передач с различными
передаточными отношениями между этими
валами. Например, на рис.2.1 изображена
двухваловая переключаемая передача,
состоящая из передвижного блока на
первом валу и трех неподвижных зубчатых
колес на втором валу. Такой привод может
обеспечить три различные скорости
(ступени). В принципе с помощью двухваловой
передачи можно получить любое количество
ступеней Z,
однако для этого необходимо иметь Z
различных передач (передаточных
отношений) между валами. При Z
больше четырех валы двухваловой передачи
получаются слишком длинными, количество
пар зубчатых колес должно быть равно Z
, и габарит передачи резко возрастает.
Поэтому для обеспечения достаточно большого количества ступеней обычно применяют многоваловые коробки с последовательно расположенными переключаемыми передачами. На рис. 2.2 показана такая коробка, состоящая из четырех валов и позволяющая получить восемнадцать ступеней частоты вращения последнего вала.
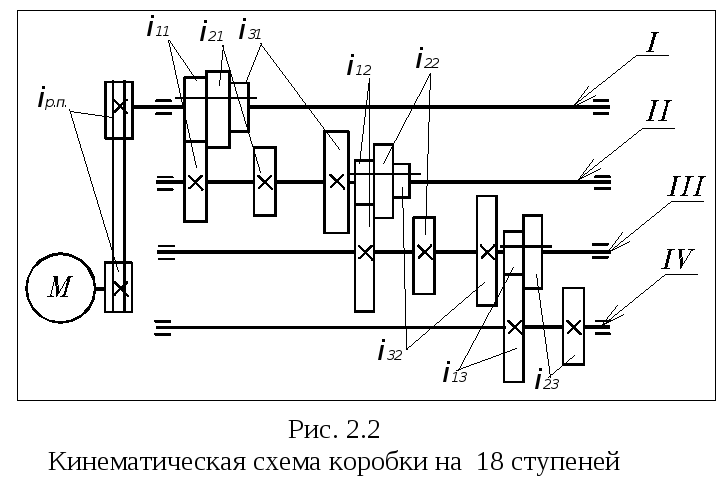
Переключаемые передачи между двумя соседними валами, например, три передачи между I и II валами, образуют так называемую групповую передачу (или, сокращенно, - группу). Количество различных передаточных отношений в групповой передаче обозначают латинской буквой p с индексом, обозначающим порядковый номер передачи: p1; p2; p3; и т.д.
Обычно на кинематических схемах не обозначают передаточные отношения, а лишь указывают номер зубчатого колеса или число его зубьев. Однако для удобства дальнейших рассуждений на рис 2.2 обозначены передаточные отношения с указанием индексов: например, i21 – второе передаточное отношение первой групповой передачи.
Очевидно, что в общем случае количество ступеней, которое позволяет получить привод с последовательно расположенными групповыми передачами будет:
![]() (2.2)
(2.2)
Применение последовательно расположенных групповых передач позволяет уменьшить общее количество зубчатых пар в приводе: так в коробке, показанной на рис. 2.2, использовано 8 пар зубчатых колес вместо 18 пар, которые понадобились бы в двухваловой передаче.
Обычно количество различных передаточных отношений в групповой передаче назначают равным от двух до четырех.