2.12 Кинематическая структура приводов с частичным перекрытием ступеней скорости.
Если в приводе большой диапазон регулирования, и требуемое количество ступеней частот вращения достаточно велико, то в последней групповой передаче диапазон регулирования получится больше допустимого.
Простейшим выходом из этой ситуации является применение так называемых “структур с частичным перекрытием ступеней скорости”.
Например, необходимо
разработать кинематику привода со
знаменателем ряда
![]() =1,41
на 18 ступеней. Если взять привод с такой
кинематикой на Z=18,
как на рис.2.2 и, следовательно, со
структурной формулой Z=313223,
то в последней переборной группе диапазон
регулирования будет (как это видно и из
рис 2.5):
=1,41
на 18 ступеней. Если взять привод с такой
кинематикой на Z=18,
как на рис.2.2 и, следовательно, со
структурной формулой Z=313223,
то в последней переборной группе диапазон
регулирования будет (как это видно и из
рис 2.5):

Можно принять
структурную формулу, в которой будет
больше групповых передач, но в последних
переборных группах уменьшить величину
характеристики так, чтобы диапазон
регулирования ни в одной группе не
выходил за допустимые пределы. При
![]() =1,41
такая предельно допустимая характеристика
группы будет x=6
(т.к. 1,416
=1,41
такая предельно допустимая характеристика
группы будет x=6
(т.к. 1,416![]() 8.
8.
Можно, например, принять Z=31222324. Такое произведение дает 24 ступени, но если уменьшить характеристику последней группы, то число различных ступеней тоже уменьшится. Это можно увидеть, построив структурную сетку такого привода (см. рис. 2.14).

Применение структур с частичным перекрытием ступеней дает еще одну интересную возможность. С помощью таких структур можно разрабатывать привод с числом ступеней скорости, не являющимся произведением чисел “два”, ”три”, или ”четыре”. Можно, например, разработать привод на одиннадцать, четырнадцать, пятнадцать, девятнадцать и т. п. ступеней. Для этого, конечно, придется взять формулу структуры, обеспечивающую номинально большее количество ступеней. Однако, если в последней переборной группе, состоящей из двух передач, уменьшить характеристику на k единиц, то ровно на столько же уменьшится номинально возможное число ступеней.
Например, для того, чтобы получить 11 ступеней частот вращения можно принять формулу структуры
![]()
Формально в последней переборной группе характеристика должна быть равна
![]()
В этом случае получится 12 ступеней. Если же принять характеристику третьей группы равной не 6, а х3=5, то одна ступень “перекроется”, и в приводе будет всего 11 различных ступеней частот вращения.
При большом количестве перекрываемых ступеней такой прием становится неэкономичным – в приводе оказывается много дублирующих друг друга передач.
Во многих случаях гораздо более удобным оказывается другой широко распространенный прием – применение так называемых “сложенных структур”.
2.13 Кинематическая структура приводов со сложенной структурой
Сложенную структуру применяют в первую очередь тогда, когда диапазон регулирования в последней переборной группе оказывается больше допустимого. В этом случае какая-то передача (или обе передачи) в этой группе будет иметь недопустимо большое или малое передаточное отношение. Выход из ситуации такой – вместо групповой передачи применить две серии одиночных передач, использующих, как правило, различные валы. Такой прием применяется во многих станках с большим диапазоном регулирования, в частности практически во всех универсальных токарно-винторезных станках со ступенчатым регулированием.
В качестве примера
ниже рассмотрена простейшая кинематика
привода шпинделя станка на 16 ступеней
при
![]() =1,41.
Если применить в этом случае структурную
формулу
=1,41.
Если применить в этом случае структурную
формулу
![]() ,
,
то в последней
переборной группе характеристика будет
равна 8, а диапазон регулирования
![]() ,
что вдвое больше допустимого. Тогда
вместо последней переборной группы
можно использовать две серии одиночных
передач, причем понижающие передачи
разбить на две-три ступени. Это даст
возможность применить везде передаточные
отношения, остающиеся в допустимых
пределах.
,
что вдвое больше допустимого. Тогда
вместо последней переборной группы
можно использовать две серии одиночных
передач, причем понижающие передачи
разбить на две-три ступени. Это даст
возможность применить везде передаточные
отношения, остающиеся в допустимых
пределах.
На рис. 2.15 показана кинематическая схема привода на 16 ступеней, в котором последняя переборная группа заменена двумя сериями одиночных передач. Три групповых передачи по два передаточных отношения в каждой передают восемь различных ступеней скорости на вал IV. Далее с вала IV вращение можно передать одной передачей непосредственно на шпиндель, вал VII (8 ступеней). Можно также, переключив двойной блок на шпинделе вправо и соединив его с валом VI, передать вращение с вала IV на вал V, на вал VI и далее на шпиндель уже с помощью трех передач. Три понижающих передачи через два дополнительных вала часто называют перебором. Они могут обеспечить весьма малое общее передаточное отношение.
Структурную формулу такого привода записывают обычно так
![]()
Первую часть (перед скобками) называют общей частью привода. В данном случае общая часть привода в обеих слагаемых частях одинакова. В целом же привод состоит из двух приводов, имеющих некоторую общую часть.

В данном случае, поскольку за общей частью
привода в обеих слагаемых частях
одинаковое количество передач, т. е.
следуют только одиночные передачи, то
структурная сетка для них будет
одинаковой, и ее можно изображать только
один раз, как показано на рис. 2.16.
данном случае, поскольку за общей частью
привода в обеих слагаемых частях
одинаковое количество передач, т. е.
следуют только одиночные передачи, то
структурная сетка для них будет
одинаковой, и ее можно изображать только
один раз, как показано на рис. 2.16.
Если же в слагаемых частях будет разное количество передач, например, как в станке мод. 1К62
![]() ,
,
то для каждой части привода следует изобразить отдельную структурную сетку.
Пример варианта графика частот вращения для привода с кинематической схемой по рис.2.15 приведен на рис. 2.17.
Здесь принято, что
частота вращения шпинделя изменяется
от 11,2 об/мин до 2000 об/мин по ряду со
знаменателем
![]() =1,41,
а двигатель вращается с частотой 2850
об/мин.
=1,41,
а двигатель вращается с частотой 2850
об/мин.
О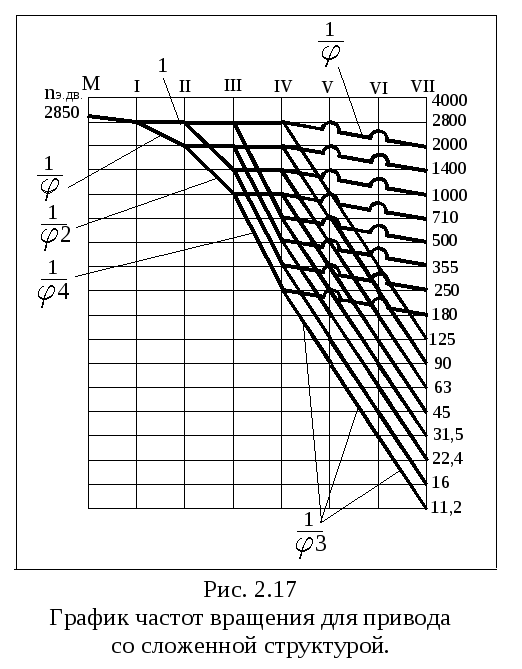 т
электродвигателя М до IV
вала изображена общая часть привода,
обеспечивающая
т
электродвигателя М до IV
вала изображена общая часть привода,
обеспечивающая
![]() ступеней частот вращения. Далее может
быть включена прямая передача с вала
IV
на вал VII,
В данном случае – это передача с
передаточным отношением 1/
ступеней частот вращения. Далее может
быть включена прямая передача с вала
IV
на вал VII,
В данном случае – это передача с
передаточным отношением 1/![]() .
На изображении передачи показаны две
полудуги в том месте, где она пересекает
вертикальные линии валов V
и VI.
Это означает, что она передает движение,
минуя промежуточные валы VI
и VII.
Прямая передача обеспечивает получение
верхней части диапазона частот вращения.
.
На изображении передачи показаны две
полудуги в том месте, где она пересекает
вертикальные линии валов V
и VI.
Это означает, что она передает движение,
минуя промежуточные валы VI
и VII.
Прямая передача обеспечивает получение
верхней части диапазона частот вращения.
Нижняя часть
диапазона получается с помощью трех
понижающих передач с передаточным
отношением 1/![]() .
Они передают вращение последовательно
с вала IV
на валы V,
VI
и VII.
.
Они передают вращение последовательно
с вала IV
на валы V,
VI
и VII.
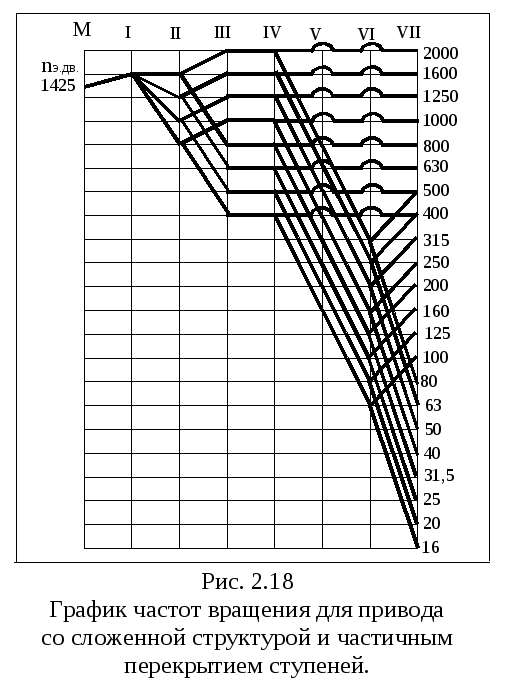
Во многих случаях при проектировании привода используют комбинацию двух приемов, т.е. в приводе со сложенной структурой применяют также частичное перекрытие ступеней частот вращения – либо перекрываются ступени двух слагаемых структур, либо перекрытие выполняют в одной из них.
На рис. 2.18 показан
пример графика частот вращения для
привода со структурой
![]() ,
который обеспечивает не 24, как следует
из формулы, а только 22 ступени, за счет
того, что две ступени (400 и 500 об/мин)
получаются и при включении прямой
передачи и при включении перебора.
,
который обеспечивает не 24, как следует
из формулы, а только 22 ступени, за счет
того, что две ступени (400 и 500 об/мин)
получаются и при включении прямой
передачи и при включении перебора.