

4.3. Разработка подсистемы питания
Функциональные требования предполагают использование для организации системы питания автономное питание (аккумуляторные батареи-АКБ). АКБ должна иметь напряжение выше, чем требуется для подсистемы узлов. Самое высокое необходимое напряжение - 15В. Исходя из этого, требуется батарея имеющая напряжение выше 15В. Так как для датчиков измерения постоянного и переменного тока нужно напряжение в диапазоне от -15В до +15В. Поэтому предлагается использовать две аккумуляторные батареи.
Для получения необходимых уровней напряжения питания предлагается использовать преобразователи DC-DC. В таблице 1 представлены характеристики преобразователейDC-DCсемействаTSR.
Таблица 1.Модели DC-DCпреобразователей
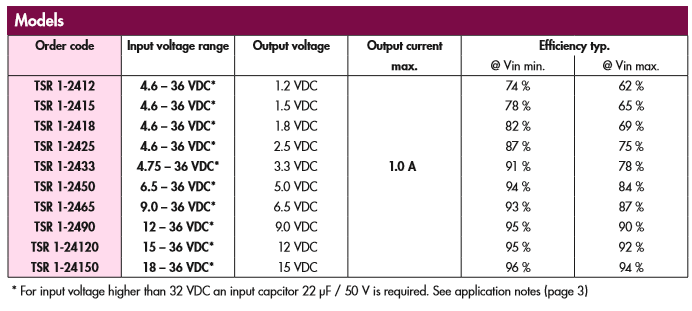
Для узлов, где расположены OEM-модули, выберем преобразователь TSR 1-2450, т.к. им необходимо напряжение питания 5В, а ток 1А удовлетворяет характеристикам узла. В каждом узле расположим по одному преобразователю.
Для узлов, где расположены датчики переменного тока, выберем два преобразователя TSR 1-24120, т.к. им необходимо напряжение питания от -12В до +12В.
Для узлов, где расположены датчики постоянного тока, возьмем два преобразователя TSR 1-24150, т.к. им необходимо напряжение питания от -15В до +15В.
4.4. Разработка схемы подключения модулей
Узел 1 и 2 взаимодействуют друг с другом посредством CAN-шины. Для взаимодействия узла 2 и 3 используется интерфейсRS-485.
На общей схеме соединения всех узлов данные соединения будут обозначаться как разъём X4 дляCAN-шины и разъёмX5 для интерфейсаRS-485.
Назначение соединителей модулей системы мониторинга:
X1 – для подключения видеокамеры
X2 – для подключения узла датчиков переменного тока
X3 - для подключения узла датчиков постоянного тока
X6 - для подключения энкодера.
Разъём X1:
DH1- положение ручки управления тягой, линия1
DH2- положение ручки управления тягой, линия2
DH3- положение ручки управления тягой, линия3
BH-положение ручки управления тормозами
CHS-сигнал смены позиции камеры
CAM P1-позиция камеры, линия1
CAM P2- позиция камеры, линия2
CAM P3- позиция камеры, линия3
CAM P4- позиция камеры, линия4

Подключение разъёма X1 к микроконтроллеру можно увидеть в приложении
Разъём X2
S1- датчик напряжения, выход датчика Vout
S2-датчик напряжения, GND
S3-датчик тока, выход датчика M
S4-датчик тока, GND
Гальваническая развязка нужна для того, чтобы избежать помех, которые будут наводиться оборудованием электропоезда. Гальваническая развязка подключена к выходам датчиков, а также к “нулевому” проводу.
Разъём X3
Точно такой же разъём, как и разъём X2, но служит для соединения узла 1 с узлом датчиков постоянного тока.
Разъём X6

ENC– выход энкодера, линия счётных импульсов энкодера
Разъём PS1
Служит для подключения преобразователя DC-DCк аккумуляторным батареям.

Разъём PS2
Служит для подключения преобразователя DC-DCк датчикам тока и напряжения или для питанияOEM-модулей и преобразователя мощности.

Заключение:
В курсовой работе произведен выбор элементной базы и разработаны схемы электрические функциональные системы мониторинга. Узлы системы реализованы на базе семейcтваOEM-модулей фирмыchip45. Подсистема измерения потребляемой мощности реализована на базе семейства датчиков фирмыLEMи измерителяMPC3909.
Список литературы:
1.Э. Таненбаум. Архитектура компьютера. 4-е изд. – СПб.: Питер, 2006. – 699 с.: ил.
2.В.В. Корнеев, А.В.Киселев. Современные микропроцессоры. / Спб.: БХВ-Питербург, 2003. – 440 с.: ил.
3. Микропроцессорные системы. Учебное пособие для вузов под ред. Д.В.Пузанкова. / Спб.: Политехника, 2002. – 935 с.: ил
4. И.И. Шагурин. Современные микропроцессоры и микроконтроллеры Motorola. Справочник. / М.: Горячая линия-Темка, 2004. – 952 с.: ил.
5. В.В. Сташин и др. Проектирование цифровых устройств на однокристальных микроконтроллерах. / М.: Энергоатомиздат, 1990. – 224 с.: ил.
6. Н.Н. Шелкунов, А.П. Дианов. Микропроцессорные средства и системы. – М.: Радио и связь, 1989. – 288 с.: ил.