

Введение
Эффективность и безопасность движения по железной дороге во многом зависит от стиля вождения. Поэтому актуальной является подготовка машинистов электропоездов. Центры подготовки машинистов должны использовать в своей работе объективные сведения о стиле вождения курсанта. Эти сведения могут быть получены путем записи параметров силы сцепления, расхода энергии и вводов сигналов управления курсантом во время управления поездом.
Задача состоит в разработке система мониторинга стиля управления поездом, которой предъявляются следующие требования.
Система предназначена для записи скорости движения, расхода энергии и сигналов управления машинистом.
Нам нужно разместить в каждой кабине по одному узлу, выполняющему контроль над органами управления. Так как управлять поездом можно из двух кабин, то в каждой нужно брать сигналы с ручек управления скоростью движения и ручек управления тормозами. Также в одном узле будем брать сигнал с энкодера, а в другом узле будем брать сигнал с датчиков, которые измеряют потребляемый ток и напряжение, чтобы в дальнейшем можно было подсчитать потребляемую мощность. На рисунке ниже представлена структурная схема этой системы.
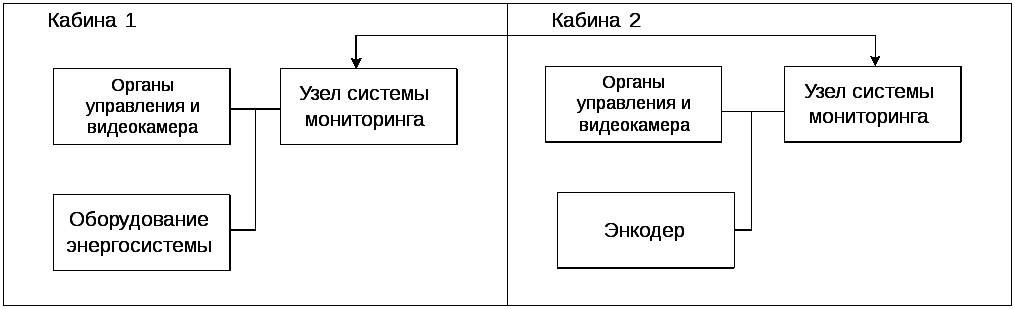
Рис.1. Структурная схема распределенной системы мониторинга
1. Список функциональных требований
Список измеряемых параметров:
а) Мощность:
постоянный ток тяги <600А;
переменной вспомогательный ток < 100А;
напряжение шины постоянного тока <750 В;
переменного тока напряжения питания <110 В.
б) Стиль вождения (сигналы брать из обеих кабин поезда):
положение ручки управления тягой (позиции от 0 до 4), 3 линии TTL-уровня;
Положение ручки управления тормозами (вкл/выкл), 1 линия TTL-уровня;
импульсный сигнал изменение положения Cam (видеокамера), 1 линия TTL-уровень сигнала;
положение Cam (16 позиций). Четыре линии TTL-уровня.
в) Выравнивание и синхронизации (сигналы брать только из одной кабины):
Расстояние измеряется с помощью существующего оптического энкодера, установленного на оси. Импульсы TTL поставляются каждые 20. Диаметр колеса составляет 1,1 м. Максимальная скорость транспортного средства составляет 80 км/ч;
Временные характеристики:
Время работы системы – 2 часа.
Память:
Лог данных должен содержать следующую информацию:
Время в формате, определенном разработчиком;
Тяговое напряжения с точностью 16 бит;
Тяговый ток с точностью 16 бит;
Тяговое усилие (напряжение*ток);
Вспомогательное напряжение с точностью 12 бит;
Вспомогательный ток с точностью 12 бит;
Пройденный путь (положение от начала);
Положение ручки управления;
Положение переключателя торможения;
Количество изменений положения видеокамеры;
Исходное положение Cam.
Хранилище данных должно быть в виде энергонезависимой памяти без движущихся частей (например, SD-карта илиSPIFlash);
Питание:
Для питания встроенной системы должна использоваться батарея;
Ведение времени:
Синхронизация времени должна быть либо предоставляема GPS либо осуществляться при помощи часов реального вреиени (RTC)