

Колоша физика
.doc-
Третий закон Ньютона : Тела действуют друг на друга с силами, равными по модулю и противоположными по направлению.
 Существует
конечная максимальная скорость распространения
взаимодействий,
которая равна скорости света в вакууме.
Поэтому третий закон Ньютона ( а также
и второй) имеет определенные пределы
применимости. Однако при скоростях
тел, значительно меньших скорости
света, с которыми имеет дело ньютоновская
механика, оба закона выполняются с
очень большой точностью.
Существует
конечная максимальная скорость распространения
взаимодействий,
которая равна скорости света в вакууме.
Поэтому третий закон Ньютона ( а также
и второй) имеет определенные пределы
применимости. Однако при скоростях
тел, значительно меньших скорости
света, с которыми имеет дело ньютоновская
механика, оба закона выполняются с
очень большой точностью. -
Векторная величина
|
|
|
называется
угловой скоростью тела. Вектор ![]() направлен
вдоль мгновенной оси вращения в сторону,
определяемую правилом винта, т.е. также
как вектор элементарного поворота
направлен
вдоль мгновенной оси вращения в сторону,
определяемую правилом винта, т.е. также
как вектор элементарного поворота ![]() . Модуль
вектора угловой скорости равен
. Модуль
вектора угловой скорости равен ![]() .
Вращение с постоянной угловой скоростью
называется равномерным, при этом:
.
Вращение с постоянной угловой скоростью
называется равномерным, при этом:
![]()
т.е.
при равномерном вращении ![]() показывает,
на какой угол поворачивается тело за
единицу времени.
Время, за которое
тело совершает один оборот, т.е.
поворачивается на угол
показывает,
на какой угол поворачивается тело за
единицу времени.
Время, за которое
тело совершает один оборот, т.е.
поворачивается на угол ![]() ,
называется периодом обращения. Так
как промежутку времени
,
называется периодом обращения. Так
как промежутку времени ![]() соответствует
угол поворота
соответствует
угол поворота ![]() ,
то
,
то
![]() Число
оборотов
Число
оборотов ![]() в
единицу времени, очевидно, равно:
в
единицу времени, очевидно, равно:
|
|
отсюда следует, что угловая скорость
|
|
В
случае неравномерного движения ![]() не
остается постоянной. Величина,
характеризующая скорость изменения
угловой скорости называется угловым
ускорением и равна:
не
остается постоянной. Величина,
характеризующая скорость изменения
угловой скорости называется угловым
ускорением и равна:
|
|
Линейная скорость точки по определению.
|
|
линейные ускорения точек вращающегося тела. Нормальное ускорение:
![]()
![]() Тангенциальное
ускорение :
Тангенциальное
ускорение :
![]()
![]()
В
системе отсчета, связанной с Землей, на
всякое тело действует сила тяжести mg.
Она приблизительно равна силе
гравитационного притяжения к Земле
(различие между силой тяжести и
гравитационной силой обусловлено тем,
что система отсчета, связанная с Землей,
не вполне инерциальная). Вес тела – это
сила, с которой тело в состоянии покоя
действует на подвес или опору, вследствие
гравитационного притяжения к Земле.
Поскольку силы ![]() и
и ![]() уравновешивают друг друга, то выполняется
соотношение
уравновешивают друг друга, то выполняется
соотношение
![]() .
Вес
и сила тяжести равны друг другу, но
приложены к разным точкам: вес к подвесу
или опоре, сила тяжести – к самому телу.
.
Вес
и сила тяжести равны друг другу, но
приложены к разным точкам: вес к подвесу
или опоре, сила тяжести – к самому телу.
-
Уравнение движения материальной точки в неинерциальной системе отсчёта может быть представлено в виде[1]:
![]() ,
,
или в развёрнутом виде:
 Связь
ускорений можно найти путём дифференцирования
связи для скоростей, не забывая, что
относительное перемещение также может
зависеть от времени.
Связь
ускорений можно найти путём дифференцирования
связи для скоростей, не забывая, что
относительное перемещение также может
зависеть от времени.
Абсолютное
ускорение ![]() будет
равно сумме:
будет
равно сумме:
![]()
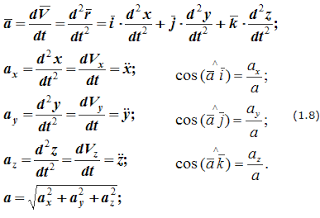
5..Уравнение скорости V=Vx*i+Vy*j+Vz*k
cosA=Vx/v
cosB=Vy/v
cosY=Vz/v ускорение-

6. S=∑∆Si = ∑Vi*∆ti => lim(t–0) ∑∆Si = §Vdt (Площадь под графиком функции ) Путь пройденный за какой то промежуток времени численно выражается площадью ограниченной осью времени графиком скорости и двумя вертикальными отрезками проведенными из начала и конца данного отрезка . 7. Всякое тело вблизи поверхности Земли испытывает силу притяжения
|
|
|
|
|
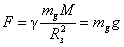 ,
,Под действием этой силы тело приобретает ускорение:
|
|
|
|
|
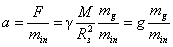 ,
,Опыт показывает, что ускорение а для всех тел одинаково: a = g. Следовательно, и mg = min. 8 Векторный способ задания движения r = rx*i+ry*j+rz*k где (I j k)единичные орты
Координатный способ

x=x(t)
y=y(t)
z=z(t)

dϮ/dt=V*n/R
9 Масса это есть инертность тела. Под инертностью понимают неподатливость тела действию силы тоесть свойство тела противиться изменению скорости под воздействием силы
Импульс тела - это физическая векторная величина, равная произведению массы тела на его скорость. Вектор импульса тела направлен так же как и вектор скорости этого тела.
![]()
![]() Импульс
системы, на которую не действуют никакие
внешние силы (или
они скомпенсированы), сохраняется во
времени:
Импульс
системы, на которую не действуют никакие
внешние силы (или
они скомпенсированы), сохраняется во
времени:
Законы Ньютона
-
При отсутствии внешних сил тело сохраняет состояние покоя или равномерно движется с ускорением равныи 0 .
а = 0 если F = 0
-
Действующая на тело результирующая сила равна произвидению массы и ускорения F=ma
-
При любом взаимодействии двух тел с которыми взаимодействует 2 тело с 1 равно по величине и противоположно по направлению силе , с которой второе действует на первое F=--F 10. Сила это мера взаимодействия тел . Масса это есть инертность тела. Под инертностью понимают неподатливость тела действию силы тоесть свойство тела противиться изменению скорости под воздействием силы.
Действующая на тело результирующая сила равна произвидению массы и ускорения F=ma основное урние динамики F=ma
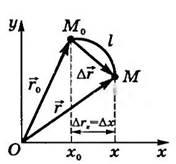
11---------------------------8 12 Перемеще́ние (в кинематике) — изменение местоположения физического тела в пространстве относительно выбранной системы отсчёта. Также перемещением называют вектор, характеризующий это изменение. Обладает свойством аддитивности. Обычно обозначается символом S - от итал. spostamento (перемещение).Длина отрезка — это модуль перемещения, в Международной системе единиц (СИ) измеряется в метрах.Можно определить перемещение, как изменение радиус-вектора точки дельта Р Ско́рость— векторная физическая величина, характеризующая быстроту перемещения и направление движения материальной точки относительно выбранной системы отсчёта; по определению, равна производной радиус-вектора точки по времени. V= dr/dt
Ускоре́ние— физическая величина, определяющая быстроту изменения скорости тела, то есть первая производная от скорости по времени. Ускорение является векторной величиной, показывающей, на сколько изменяется вектор скорости \vec v тела при его движении за единицу времени: a=dV/dt
13. Существует конечная максимальная скорость распространения взаимодействий, которая равна скорости света в вакууме .
14. Неинерциа́льная систе́ма отсчёта — система отсчёта, в которой не выполняется первый закон Ньютона — «закон инерции», говорящий о том, что каждое тело, в отсутствие действующих на него сил, покоится либо движется по прямой и с постоянной скоростью.
Основное
уравнение динамики в НИСО
![]() 15.
15.
![]() * n
* n
![]()
![]() * t
a=a(Ϯ)*Ϯ+a(n)*n
V=V(Ϯ)*Ϯ
* t
a=a(Ϯ)*Ϯ+a(n)*n
V=V(Ϯ)*Ϯ
16![]()
17.Силы инерции это силы возникающие в
следствие ускорения , которые равны и
противоположны по направлению силам
вызывающим данное ускорение
F`
= -ma
Центробежная сила
инерции : F=m*ῳ^2*R
она возникает во вращающихся системах
отсчета и не зависит от того покоится
тело в этой системе или движется
относительно нее со скоростью V.
Си́ла
Кориоли́са —
одна из сил
инерции,
существующая в неинерциальной
системе отсчёта из-за вращения и законов
инерции,
проявляющаяся при движении в направлении
под углом к оси вращения

18. Теоре́ма
о движе́нии це́нтра масс (це́нтра
ине́рции) системы
Утверждает,
что ускорение центра
масс механической
системыне
зависит от внутренних сил,
действующих на тела системы, и связывает
это ускорение с внешними силами,
действующими на систему
где M — масса всей системы, равная
![]()
19.
В
системе отсчета, связанной с Землей, на
всякое тело действует сила тяжести mg.
Она приблизительно равна силе
гравитационного притяжения к Земле
(различие между силой тяжести и
гравитационной силой обусловлено тем,
что система отсчета, связанная с Землей,
не вполне инерциальная). Вес тела – это
сила, с которой тело в состоянии покоя
действует на подвес или опору, вследствие
гравитационного притяжения к Земле.
Поскольку силы ![]() и
и ![]() уравновешивают друг друга, то выполняется
соотношение
уравновешивают друг друга, то выполняется
соотношение
![]() .
Вес
и сила тяжести равны друг другу, но
приложены к разным точкам: вес к подвесу
или опоре, сила тяжести – к самому телу.
.
Вес
и сила тяжести равны друг другу, но
приложены к разным точкам: вес к подвесу
или опоре, сила тяжести – к самому телу.
20. Си́ла
Кориоли́са —
одна из сил
инерции,
существующая в неинерциальной
системе отсчёта из-за вращения и законов
инерции,
проявляющаяся при движении в направлении
под углом к оси вращения

21. Центробежная сила инерции : F=m*ῳ^2*R она возникает во вращающихся системах отсчета и не зависит от того покоится тело в этой системе или движется относительно нее со скоростью V.