

РАБОТА № 6
Определение момента инерции махового колеса методом колебании
Цель работы.Ознакомление с методом измерения моментов инерции тел, обладающих осевой симметрией.
Приборы и принадлежности: маховое колесо, добавочный груз в виде диска, штангенциркуль, секундомер.
Введение
Момент инерции тела I относительно некоторой оси является мерой инертности тела при вращении его вокруг этой оси. Для материальной точки момент инерции равен произведению ее массы на квадрат расстояния до оси вращения:
I mr2,
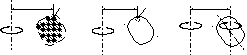
а для тела, которое можно представить в виде системы большого количества материальных точек (рис. 6.1.а), момент инерции относительно некоторой оси вращения равен сумме произведений масс всех материальных точек на квадраты их расстояний до этой оси:
I
![]() .
.
 ri
mi
r
dm
О
a
ri
mi
r
dm
О
a
О
M
ОII0
а) б) в) О
Рис. 6.1
Для вычисления момента инерции сплошного тела его мысленно разбивают на бесконечное малые области с массами dm, каждая из которых находится на своём расстоянииrот оси вращения (рис. 6.1.б);Iнаходят интегрированием по всем этим областям:
I
![]() .
.
Понятно, что момент инерции зависит не только от общей массы тела, но и от формы тела, а также – от распределения массы по его объёму (так, например, какие-то части тела могут быть изготовлены из более тяжёлого материала, а какие-то – из более лёгкого).
Ось вращения может проходить через центр масс тела, а может и находиться вне его (рис. 6.1.в). Во втором случае для вычисления момента инерции пользуются вспомогательной формулой, которая выводится при доказательстве теоремы Штейнера(см. книги [1, 2]).
М омент
инерции телаI
относительно произвольной оси равен
сумме момента инерции I0
относительно оси, параллельной данной
и проходящей через центр масс тела, и
произведения массы тела т
на квадрат расстояния а
между осями:
омент
инерции телаI
относительно произвольной оси равен
сумме момента инерции I0
относительно оси, параллельной данной
и проходящей через центр масс тела, и
произведения массы тела т
на квадрат расстояния а
между осями:
I = I0+ ma2. (1)
При конструировании технических устройств, содержащих вращающиеся детали (на железнодорожном транспорте, в самолетостроении, электротехнике и т.д.), требуется знание величин моментов инерции этих деталей. При сложной форме тела теоретический расчет его момента инерции может оказаться трудно выполнимым. В этих случаях предпочитают измерить момент инерции нестандартной детали опытным путем.
В предлагаемой лабораторной работе изучается один из самых простых, но достаточно надёжных, методов измерения моментов инерции тел, обладающих осевой симметрией.
Метод измерения и описание аппаратуры
В работе определяется момент инерции махового колеса К, ось симметрии которого параллельна поверхности земли. Колесо находится в состоянии безразличного равновесия, но после крепления к немудобавочного груза Г (рис. 6.2), колесо может колебаться относительно горизонтальной оси.
 Ось
Маховое
колесо К
Ось
Маховое
колесо К
Добавочный
груз Г
Рис. 6.2
Если пренебречь силами трения в подшипниках системы, то при малойамплитуде 0 колебаний(0 5 8, при этомsin0 tg0 0) они окажутся гармоническими, то есть угол отклонения системы от положения равновесия будет со временемtменяться по следующему закону:
0cos![]() .
(2)
.
(2)
Здесь T период колебаний системы, величина которого, как будет показано ниже, зависит от её момента инерции.
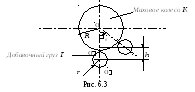
Маховое колесо начинает совершать колебания за счет сообщенной ему извне энергии. Добавочный груз Г, поднятый на высотуhотносительно положения равновесия, обладает потенциальной энергиейmgh (см. рис. 6.3).
При прохождении системой (К иГ) положения равновесия потенциальная энергия грузаГпреобразуется в кинетическую энергию вращательного движения махового колесаК и добавочного грузаГ. Таким образом,
mgh =
![]() ,
(3)
,
(3)
где Iобщ сумма моментов инерции махового колесаI и добавочного грузаIГотносительно горизонтальной осиО, проходящий через центр махового колеса вдоль стержня:
IобщI IГ; (4)
т масса добавочного груза;
g ускорение силы тяжести;
h высота, на которую поднимается груз;
макс угловая скорость махового колеса с грузом при прохождении системой положения равновесия.
Как следует из формул (3) и (4), для нахождения момента инерции махового колеса I нужно знатьмакс,т, hиIГ. Угловая скоростьмаксопределяется из уравнения (2) после установления характера зависимостиот времениt:
![]() 0
0![]() sin
sin![]() .
(5)
.
(5)
Из уравнения следует, что максимальное значение угловой скорости (по модулю) в момент прохождения системой положения равновесия равно:
макс 0![]() .
(6)
.
(6)
Высоту hподнятия центра инерции добавочного груза (см. рис. 6.3) можно выразить так:
![]() cos0,
cos0,
где Rиr радиусы махового колеса и добавочного груза соответственно.
Следовательно,
h (R + r)(1 cos0). (7)
Подставляя в уравнение (3) найденные выражения для h и макс, получаем:
mg(R
+ r)(1
cos0)
![]() .
(8)
.
(8)
Величина 0неудобна длянепосредственного измерения,поэтому исключим ее из уравнения (8). При малых углах, выраженных в радианной мере,
cos01
![]() .
(9)
.
(9)
Подставив это значение косинуса в левую часть уравнения (8), получим формулу для расчета Iобщотносительно осиО:
Iобщ![]() .
(10)
.
(10)
Момент инерции добавочного груза IГнаходим по теореме Штейнера. В лабораторной установке добавочный груз выполнен в виде диска из однородного материала и укреплен так, что его геометрическая ось параллельна оси симметрии махового колеса. Момент инерции добавочного грузаГотносительно осиО(см. рис. 6.3) равен
IГ
![]() mr2 +
m(R+r)2.
(11)
mr2 +
m(R+r)2.
(11)
Первый член правой части равенства момент инерции груза относительнооси О', проходящей через его центр масс параллельно оси О. Второе слагаемое – это произведение массы диска на квадрат расстояния между осямиОиО'.
Из выражений (10) и (11)получаем, чтомомент инерции махового колеса
I
Iобщ
IГ
![]()
![]() .
(12)
.
(12)
Таким образом, определение момента инерции махового колеса в данной работе удалось свести к измерению массы добавочного груза т,радиусов махового колесаRи добавочного грузаr, а также – периода колебаний махового колесаТ.
Для того, чтобы подтвердить утверждение о высокой точности данного метода измерения момента инерции, предлагается сравнить полученное значение Iс теоретическим (IТ), которое для махового колеса – однородного диска можно вычислить по формуле:
IТ
![]() m0
R2,
(13)
m0
R2,
(13)
где m0 масса махового колеса.
Учитывая, что маховое колесо и добавочный груз диски одинаковой толщины, изготовленные из одного и того же материала (заметим, что для самого метода измерения момента инерции эти факторы несущественны), можно получить равенство m0 /m R2/r2.
Таким образом, массы дисков относятся, как их объемы или (при одинаковой толщине) – как квадраты их радиусов. Выразив из последнего уравнения массу m0и подставив её в формулу (13), получим
IТ
![]() mR4/r2.
(14)
mR4/r2.
(14)
В настоящей работе непосредственно измеряются диаметры махового колеса D и добавочного груза d, а также время t десяти полных колебаний. Масса груза m и ускорение свободного падения считаются заданнымис известной степенью точности. Используя эти обозначения, окончательно запишем:
I
![]()
![]()
![]() ,
(15)
,
(15)
IТ
![]() mD4
/ d2.
(16)
mD4
/ d2.
(16)