

8.4. Модуляция пространственного вектора
Преобразование параметров трехфазной системы в двухфазную систему координат упрощает методы управления напряжениями и токами трехфазных преобразователей. Кроме того, это преобразование параметров системы хорошо согласуется с управлением электрическими машинами переменного тока посредством статических преобразователей частоты. В этой связи метод модуляции пространственного вектора напряжения трехфазных преобразователей получил широкое распространение. Основой этого метода является представление трехфазной системы напряжений в α, β -координатах в виде векторов с дискретно изменяющейся фазой в соответствии с состояниями ключей преобразователя.
В начале этой главы было показано, что в трехфазном мостовом преобразователе напряжения ключи могут находиться в восьми допустимых для работы преобразователя состояниях, из которых шесть являются активными, а два — нулевыми (см. табл. 8.3). Эти состояния определяются комбинациями включенных и выключенных ключей, которые зависят от значений трехфазных напряжений преобразователя. В этом случае происходит модуляция напряжений в пространстве состояний трехфазной системы преобразователя, которые дискретно изменяются во времени. Учитывая периодичность изменения трехфазной системы напряжения с рабочей частотой выходного напряжения преобразователя, следует отметить, что за один период выходного напряжения имеется шесть активных состояний ключей преобразовательного моста, изменяемых с частотой модуляции в соответствии с допустимыми состояниями ключей при периодической коммутации напряжений фаз. Рассмотрим изменение состояний ключей более подробно, используя понятия «обобщенного» или «пространственного» вектора в системе неподвижных осей с α, β-координатами.
Диаграммы на рис. 8.14, а отражают алгоритм управления, соответствующий управлению каждым ключом фазы на интервале длительностью π, при котором включенному состоянию каждого ключа в группе S1, S3, S5 соответствует выключенное состояние ключа той же фазы в группе S2, S4, S6, и наоборот.

Рис. 8.14. Состояние ключей трехфазного моста: а — диаграммы основных гармоник выходного фазного напряжения; б — схема соединения ключей
Нумерация состояний не имеет принципиального значения, но последовательность ее должна строго соответствовать порядку чередования напряжений иа, иb, ис. На рис. 8.14, а в качестве первого состояния принято состояние, при котором линейное напряжение uab имеет максимальное значение. Каждому состоянию ключа соответствует интервал длительностью π/3, т.е. на границе этих интервалов происходит дискретное изменение состояния ключей S1—S6. Следует отметить, что при такой длительности интервалов учитываются только шесть активных состояний и не учитываются нулевые, при которых выходные напряжения равны нулю. Поэтому в плоскости а, p-координат можно выделить векторы U1-U6, отражающие положение пространственного (обобщенного) вектора трехфазной системы на границах смены состояний ключей S1—S6. В результате на плоскости в α, β-координатах образуется шесть секторов, разграниченных векторами U1-U6 Если учесть, что рассматривается сбалансированная трехфазная система напряжений, в которой модули фазных напряжений равны между собой, а фазовые сдвиги соответствуют 2π/3 и 4π/3 , то концы векторов на диаграмме могут быть соединены между собой прямыми линиями, образовав правильный шестиугольник.
Векторы (рис. 8.15) будут разделять его площадь на секторы, соответствующие активным состояниям I—VI ключей. Центр шестиугольника, объединяющий начало векторов, может отражать состояния VII и VIII с нулевыми значениям напряжения. Обычно длина векторов равна максимальным значениям модулирующих функций. В частности, в предельном случае модуляции, когда выходное напряжение в инверторах напряжения приобретает прямоугольно-ступенчатую форму, максимальное значение напряжения фазы, определяющего длину векторов, равно – (2/3) Ud, где Ud— напряжение на шинах постоянного тока.

а б
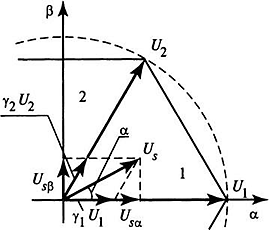
Рис. 8.15. Диаграмма модуляции пространственного вектора
При традиционной синусоидальной модуляции переключение ключей происходит в моменты равенства модулирующих синусоидальных функций с сигналами треугольной формы несущей частоты fн. Обычно в качестве задающих (опорных) сигналов используются сигналы синусоидальной формы, амплитуды которых выбираются с учетом коэффициента модуляции Ma. В общем случае такие сигналы модуляции могут формироваться для каждой фазы, образуя трехфазную систему, которая должна воспроизводиться на выходе преобразователя. Иначе происходит процесс модуляции пространственного вектора, который является единственным сигналом модулирующей функции, выполняя функции задающего сигнала для формирования трехфазной системы выходных напряжений (токов) трехфазного ключевого преобразователя. Если в традиционном способе синусоидальной ШИМ сигналы на переключение могут определяться аналоговым способом сравнения сигналов синусоидальной и треугольной форм, то при модуляции пространственного вектора моменты переключения определяются методом вычислений различными цифровыми устройствами и формированием команд на переключение ключей с периодичностью несущей частоты модуляции. Диапазоны частот fH в рассматриваемом и традиционном методах модуляции примерно одинаковы.
По методу модуляции пространственного вектора его значения усредняются в пределах каждого из шести секторов с учетом изменения его нахождения в состояниях двух смежных векторов Uк и Uk+1 в пределах k-го сектора и состояниях VII и VIII при нулевых значениях напряжения. В этом случае производится суммирование векторов напряжения, но с учетом относительной длительности γк нахождения пространственного вектора в состоянии Uk. Длительность γк можно рассматривать как коэффициент заполнения при ШИМ постоянного тока. Соответственно время нахождения ключей в состоянии, соответствующем вектору Uk, равно tk = γк Тд, где Tн = 1 ∕ fH — период несущей частоты, на которой происходит модуляция. Учитывая, что полное время пребывания в указанных состояниях векторов за период модуляции не должно превышать собственное время периода Tk можно записать
γк+γк+1+γ7+γ8=1 или tk+tk+1+t7+t8=1, (8.12)
где γк ,γк+1 — относительное время нахождения в состояниях векторов Uk и Uk+l; γ7 , γ8— относительное время нахождения в состояниях VII и VIII с нулевыми значениями пространственного вектора (8.10) в k -м секторе.
Пространственный вектор Us вращается со скоростью, соответствующей частоте выходного напряжения в системе неподвижных α, β-координат. Модуль и фаза этого вектора для сбалансированной трехфазной системы полностью определяются координатами Usα, Usβ в осях α, β. В этом случае значения времени t1, t2 в первом секторе могут быть определены из тригонометрических соотношений в ортогональных осях α с учетом принятых значений t7 и t8, рекомендуемых для различных модификаций рассматриваемого метода модуляции.
На рис. 8.15, б приведен фрагмент рис. 8.15, α, из которого можно определить значения времени t1 и t2 при расположении пространственного вектора Us в первом секторе под фазовым углом α. Так как обычно частота модуляции fH значительно превышает частоту выходного напряжения инвертора fH можно считать параметры вектора Us неизменными на интервале периода Tн.
Значения t1 и t2, рассчитанные для каждого угла α на интервалах в первом секторе, пересчитываются микроконтроллером для остальных секторов. Таким образом в качестве задающего напряжения при модуляции используется один параметр — пространственный вектор Us, являющийся суммой усредненных значений ближайших граничных векторов в каждом к-м секторе с учетом коэффициентов заполнения γk и γk+1 в общем случае с добавлением нулевых напряжений на интервалах с коэффициентами заполнения γ7 и γ8. Управление амплитудой задающего вектора Us осуществляется изменением индекса модуляции Ма.
Существует большое количество методов модуляции пространственного вектора. Среди них наиболее широко применяется метод с симметричными нулевыми состояниями t7 и t8 на интервалах периода модуляции Tн (рис. 8.16).

Рис. 8.16. Диаграмма коммутации ключей при модуляции пространственного вектора в секторе 1
В этом случае, учитывая, что обычно в каждом полупериоде частоты модуляции TH/ 2 состояния ключей изменяются одинаково, но в обратной последовательности (рис. 8.11), для первого сектора (с переходом для последующих) можно представить и записать состояние ключей следующими равенствами
 .
(8.13)
.
(8.13)
Существует метод, в котором на каждом периоде тактовой частоты используется только одно состояние t7 или t8 обеспечивающее нулевое выходное напряжение с разными расположением и длительностью меж коммутационных интервалов. Некоторые методы позволяют снижать рабочую частоту коммутации fH на 33 % без изменения эффективности модуляции. Кроме того, в зависимости от коэффициента мощности нагрузки могут быть уменьшены коммутационные потери на 30 %.
Диапазон
регулирования выходного напряжения
при векторной модуляции ограничен
максимальным значением индекса модуляции
Ма.
Линейной зависимости выходного
напряжения при Ма
= 1 на рис. 8.15, а
соответствует область, ограниченная
окружностью, вписанной в шестиугольник.
При этом максимальное значение ![]() ,
где Ud
— напряжение на стороне постоянного
тока.В этом режиме интервалы
t7
или t8
равны нулю. Дальнейший рост величины
Ма
приводит к искажению синусоидальной
формы выходного напряжения, соответствующего
работе с немодулированным напряжением.
,
где Ud
— напряжение на стороне постоянного
тока.В этом режиме интервалы
t7
или t8
равны нулю. Дальнейший рост величины
Ма
приводит к искажению синусоидальной
формы выходного напряжения, соответствующего
работе с немодулированным напряжением.
Вопросы для самоконтроля
Дайте определение пространственному вектору трехфазной системы напряжений.
Как производится ШИМ в системах с управлением пространственным вектором напряжения?
Поясните принцип организации ШИМ в системах с пространственным вектором.
Какое предельное значение имеет индекс модуляции при ШИМ пространственного вектора?
Можно ли использовать ШИМ пространственного вектора в системах с несбалансированной трехфазной системой напряжений?