1 Кинематический расчёт главного привода
1.1 Исходные данные для кинематического расчета привода
Исходными данными для кинематического расчета являются:
а)
предельные частоты вращения шпинделя

 ;
;
б)
номинальная и максимальная частоты
вращения электродвигателя
 и
и ;
;
в)
число ступеней коробки скоростей

1.2 Расчет диапазона регулирования частотвращения шпинделя
Диапазон регулирования частот вращения шпинделя

1.3 Расчет диапазона регулирования частот вращения электродвигателя при постоянной мощности
Диапазон регулирования частот вращения электродвигателя при постоянной мощности определяется по формуле

1.4 Определение расчетной частоты вращения шпинделя
Расчетная частота вращения шпинделя определяется по формуле



1.5 Округление расчетной частоты вращения шпинделядо стандартного значения
Расчетная
частота округляется до стандартного
значения
1.6 Определение диапазона регулирования частот вращенияшпинделя при постоянной мощности
Диапазон регулирования частот вращения шпинделя при постоянной мощности определяется по следующей формуле:


1.7 Расчет диапазона регулирования частот вращениякоробки скоростей
Диапазон регулирования частот вращения коробки скоростей

1.8 Определение знаменателя геометрического ряда частотвращения коробки скоростей
Знаменатель геометрического ряда частот коробки скоростей


1.9 Округление знаменателя геометрического ряда частотвращения шпинделя до стандартного значения
Знаменатель геометрического ряда частот вращения шпинделя, включаемых коробкой скоростей, округляется до стандартного значения:

1.10 Определение фактического диапазона регулированиячастот вращения шпинделя при постоянной мощности
Фактический диапазон регулирования частот вращения шпинделя при постоянной мощности определяется по следующей формуле:


1.11 Определение фактической расчетной частотывращения шпинделя
Фактическая расчетная частота вращения шпинделя

1.12 Округление фактической расчетной частоты вращенияшпинделя до стандартного значения
Фактическая расчетная частота вращения шпинделя округляется до стандартного значения:

1.13 Определение диапазона регулирования частот вращенияшпинделя при постоянном моменте
Диапазон регулирования частот вращения шпинделя при постоянном моменте рассчитывается по формуле:

1.14 Определение минимальной частоты вращения электродвигателя
Минимальная частота вращения электродвигателя

1.15 Округление минимальной частоты вращения электродвигателядо стандартного значения
Минимальная частота вращения электродвигателя округляется до стандартного значения:

1.16 Определение фактического диапазона регулированиячастот вращения шпинделя при постоянном моменте
Фактический диапазон регулирования частот вращения шпинделя при постоянном моменте определяется по формуле:

1.17 Определение фактического диапазона регулированиячастот вращения шпинделя
Фактический диапазон регулирования частот вращения шпинделя определяется по формуле:


1.18 Определение фактической минимальной частотывращения шпинделя
Фактическая частота вращения шпинделя

1.19 Округление фактической минимальной частоты вращениядо стандартного значения
Фактическая минимальная частота вращения шпинделя округляется до стандартного значения:

1.20 Определение числа делений, изображающих минимальную,номинальную и максимальную частоту вращения электродвигателя
Для построения графика частот вращения определяются числа делений, изображающих на графике частот минимальную, номинальную и максимальнуючастоту вращения электродвигателя:

1.21 Определение числа делений изображающую линейную частоту вращения электродвигателя

1.22 Определение числа делений, изображающих
знаменательгеометрического ряда частот
вращения коробки скоростей
Число
делений, изображающих знаменатель
геометрического ряда частот вращения
коробки скоростей
 ,
определяется по формуле:
,
определяется по формуле:

1.23 Оптимизация структурной формулы
Структурная формула главного привода имеет вид:

где
 –индекс, являющийся характеристикой
групповой передачи,
–индекс, являющийся характеристикой
групповой передачи, при
при и
и при
при .
.

1.24 Построение графика частот вращения главного привода
График
частот строится по разбивке
 на деления для понижающих передач,
снижающих частоту вращения электродвигателя
от
на деления для понижающих передач,
снижающих частоту вращения электродвигателя
от до
до шпинделя (рисунок 1.1).
шпинделя (рисунок 1.1).
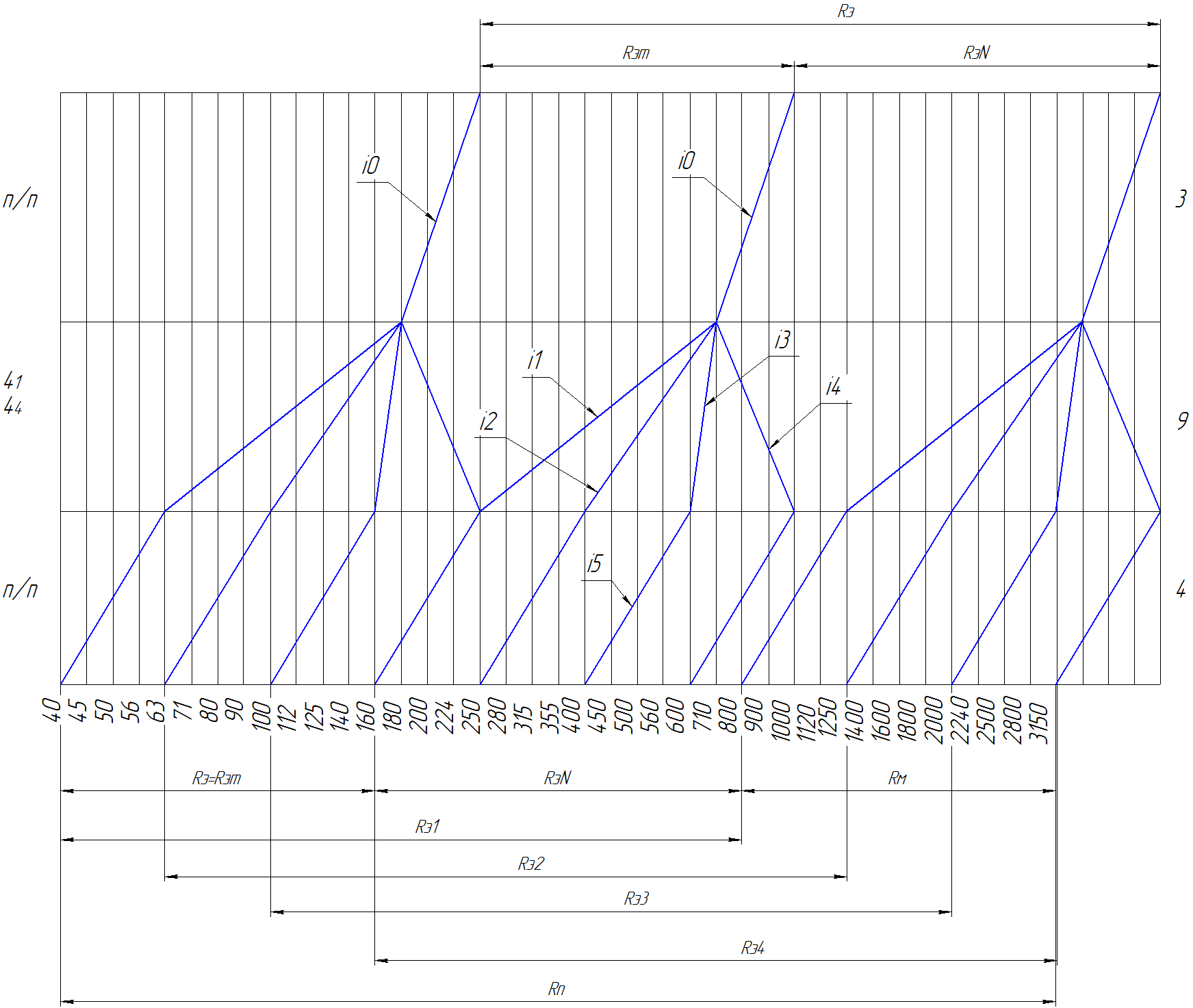
Рисунок - 1.1. График частот вращения главного привода с бесступенчатым регулированием
электродвигателем и двухступенчатой коробкой скоростей
Показатель диапазона регулирования групповой передачи необходимо рассчитать из условия

по формуле:

где
 – характеристика групповой передачи,
определяющая её диапазон регулирования
частот,
– характеристика групповой передачи,
определяющая её диапазон регулирования
частот, ;
;
 – общее число ступеней групповой
передачи,
– общее число ступеней групповой
передачи, ;
;
 – знаменатель условного геометрического
ряда частот вращения шпинделя,
– знаменатель условного геометрического
ряда частот вращения шпинделя, .
.
Допускаемое значение показателя
диапазона регулирования групповой
передачи
 при
при ,
а фактически
,
а фактически ,
и условие выполняется.
,
и условие выполняется.
Передаточные отношения должны быть в пределах
где
 и
и –
число делений, перекрываемых лучом, на
графике частот изображающим повышающие
и понижающие передачи.
–
число делений, перекрываемых лучом, на
графике частот изображающим повышающие
и понижающие передачи.
Поэтому при
 допускаются
допускаются ;
; ,
а фактически при
,
а фактически при значения
значения могут иметь определенные варианты
(табл. 7.1).
могут иметь определенные варианты
(табл. 7.1).
Таблица 7.1
Допустимые и возможные значения делений

|
|
|
|
|
|
| |
|
|
|







Из возможных вариантов для основной
групповой передачи
 может
быть принят, например, вариант
может
быть принят, например, вариант .
Тогда график частот может строиться по
разбивке
.
Тогда график частот может строиться по
разбивке ,
имеющей, например, следующий вид деления
,
имеющей, например, следующий вид деления на понижающие передачи, снижающие
частоту вращения электродвигателя от
на понижающие передачи, снижающие
частоту вращения электродвигателя от до
до шпинделя:
шпинделя: