

NIRS_Matunin_2015_06_04
.pdfФедеральное государственное образовательное учреждение высшего профессионального образования
«Московский |
государственный |
технический |
университет имени Н.Э. Баумана»
(МГТУ им. Н.Э. Баумана)
ФАКУЛЬТЕТ «СПЕЦИАЛЬНОЕ МАШИНОСТРОЕНИЕ» КАФЕДРА «АВТОНОМНЫЕ ИНФОРМАЦИОННЫЕ И УПРАВЛЯЮЩИЕ СИСТЕМЫ»
НАУЧНО-ИССЛЕДОВАТЕЛЬСКАЯ РАБОТА СТУДЕНТА
Исследование цифровой реализации адаптивного алгоритма
обнаружения
Руководитель НИРС,
к.т.н., ассистент |
Сергей Игоревич Силин |
(подпись, дата)
Исполнитель НИРС, |
|
|
студент группы СМ-5 |
|
Матюнин Дмитрий |
|
|
Викторович |
|
(подпись, дата) |
|
|
|
Москва, 2015
Реферат
Отчёт 49 с., 32 рис., 18 табл., 4 источника, 0 прил.
Ключевые слова: радиолокационные сигналы, ПЛИС, алгоритмы ЦОС, бортовая
система, обнаружитель |
сигналов, адаптивный |
порог, режим |
реального |
времени, измерительный строб
В данной работе рассмотрена цифровая система распознавания сигналов, основной
частью которой является энергетический обнаружитель (ЭО). Также рассматривается
зависимость точности формирования измерительного строба от ширины используемой шины
данных.
Целью данной работы является установление зависимости между шириной шины
данных, используемой для передачи входного сигнала и точностью формирования
измерительного строба.
Работа проводилась методом сравнения согласованности полученного измерительного строба с измерительным стробом MatLab-модели (сигнал не оцифрован) и априорно верным измерительным стробом (сформирован при задании тестового сигнала).
В результате данного исследования были получены графики зависимости точности формирования измерительного строба от ширины используемой шины данных.
Результаты данного исследования могут использоваться в области обнаружения сигналов, при создании систем обработки радиосигналов.
2
Аннотация
В данной работе рассмотрена цифровая система распознавания сигналов, основной частью которой является энергетический обнаружитель (ЭО). Так как обработка сигнала ведётся в реальном времени, то в данную систему входит не только ЭО, но и блок формирования измерительного строба, согласующий сигнал обнаружения с исходным задержанным сигналом. В работе подробно рассмотрена математическая модель адаптивного алгоритма обнаружения сигналов. Результатом исследования является установление зависимости точности работы алгоритма от разрядности используемой шины данных и способа вычисления поправочного коэффициента. В работе приведена структурная схема алгоритма, результаты работы приведены в виде графиков.
3
Содержание
Введение ............................................................................................................................................. |
6 |
|
Постановка задачи, актуальность ................................................................................................. |
6 |
|
Научная новизна, практическая значимость ............................................................................... |
6 |
|
Задачи исследования...................................................................................................................... |
7 |
|
Объект и предмет исследования................................................................................................... |
7 |
|
Структура исследования................................................................................................................ |
7 |
|
1 Теоретическая часть ....................................................................................................................... |
8 |
|
1.1 |
Математическая модель алгоритма........................................................................................ |
8 |
1.2 |
Формирование измерительного строба ............................................................................... |
11 |
1.3 |
Исследование аналогов.......................................................................................................... |
13 |
1.4 |
Обзор литературы .................................................................................................................. |
14 |
1.5 |
Разработка направлений исследований и выбор оптимального варианта ....................... |
14 |
2 Практическая часть ....................................................................................................................... |
15 |
|
2.1 |
Сравнение результатов MatLab и Verilog моделей............................................................. |
15 |
2.2 |
Влияние разрядности шины данных на точность формирования изм. строба ................ |
19 |
Заключение ................................................................................................................................... |
21 |
|
Список использованных источников ......................................................................................... |
22 |
|
4
Обозначения и сокращения
КИХ-фильтр – фильтр с конечной импульсной характеристикой; TH – Transform Hilbert ( перевод: Преобразование Гильберта);
ЭО – энергетический обнаружитель ЦБОС – цифровой блок обработки сигнала
ПЛИС – программируемая логическая интегральная схема СКО - среднеквадратичное отклонение
5
Введение
Постановка задачи, актуальность
Во многих радиолокационных системах информацию о источнике излучения получают с помощью пассивной радиопеленгации. В данной работе будет рассмотрен цифровой блок обработки сигнала, состоящий из энергетического обнаружителя с адаптивным порогом и блока формирования измерительного строба. В задачи рассматриваемого ЦБОС входят:
Принятие решения о наличии сигнала
Формирование измерительного строба для измерителя параметров
Почему используется ЭО с адаптивным порогом? Ведь его разработка и ресурсозатратность намного выше, чем у ЭО со стационарным порогом. Ответ кроется в основных недостатках ЭО со стационарным порогом. В общем случае сигналы в приёмном блоке имеют различную мощность, поэтому при синхронизации (с помощью задержек)
строба обнаружения и сигнала получается ситуация, когда строб обнаружения начинается рано (до того как начинается задержанный сигнал) или поздно. Учитывая, что оценка частоты производиться с помощью оценки набега фазы [6], то при раннем обнаружении происходит оценка частоты шумов, которая негативно влияет на результат. К примеру, при измерении шумов (ОСШ стремиться к нулю) СКО оценки частоты стремится к СКО равномерного распределения в пределах от нуля до частоты дискретизации, что в результате может привести к некорректному определению модуляции и другим ошибкам в системе. А
при позднем обнаружении коротких импульсов может получиться ситуация, что сигнал уже кончился, что также характеризует работу системы как неудовлетворительную.
Система с адаптивным порогом лишена этого недостатка, этим и обусловлена актуальность данной работы.
В данном семестре поставленная задача включает в себя построение модели данного преобразователя в системе HDL-моделирования (HDL – hardware description language – язык описания аппаратуры) Modelsim, анализ зависимости точности формирования измерительного строба от ширины используемой шины данных для входного сигнала.
Научная новизна, практическая значимость
Учитывая, что в просмотренной литературе данная задача не рассматривалась, а её решение позволит улучшить характеристики системы обработки сигналов, можно сделать вывод, что данная задача имеет высокую практическую значимость.
6
Задачи исследования
Целью данной работы является установление зависимости между шириной шины данных, используемой для передачи входного сигнала и точности формирования измерительного строба.
Объект и предмет исследования
В данной работе объектом исследования является ЦБОС, а предметом – зависимость точности формирования измерительного строба от ширины используемой шины данных для входного сигнала.
Структура исследования
В начале работы рассматривается математическая модель алгоритма, дающая читателю чёткое представление о том, как формируется строб обнаружения. Далее рассматривается алгоритм согласования полученного сигнала обнаружения с сигналом (в результате согласования получается измерительный строб). В заключительных пунктах 3 и 4 данной работы рассмотрено влияние изменения разрядности шины данных на точность работы алгоритма.
7
Основная часть
1Теоретическая часть
1.1Математическая модель алгоритма
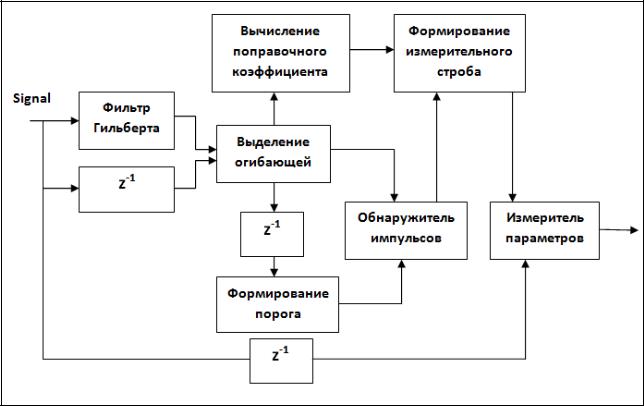
В данном пункте рассмотрим математическую модель двухканального энергетического обнаружителя. Общая структурная схема представлена на рис.1:
Рис. 1. Структурная схема энергетического обнаружителя с адаптивным порогом
Допустим, на вход системы поступает сигнал вида (рис. 2):
8
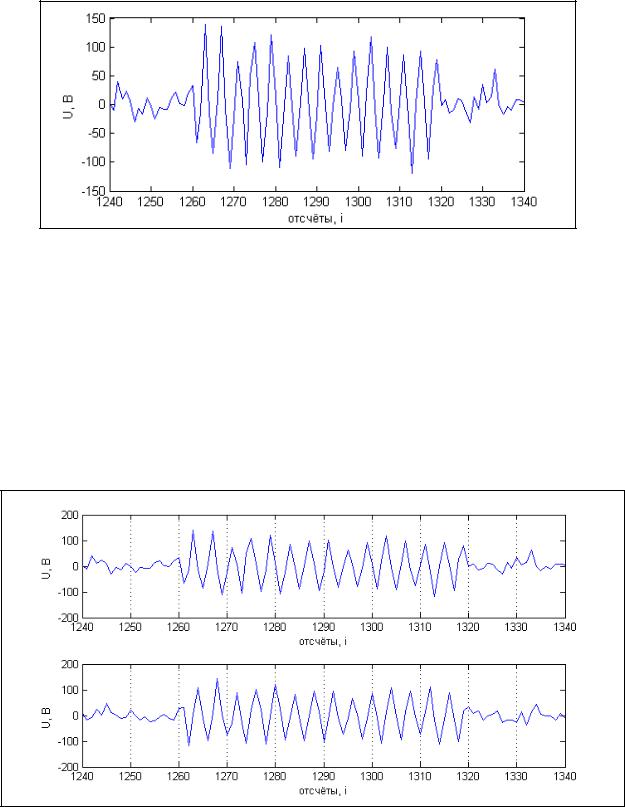
Рис. 2. Входной сигнал S(t)
Тогда в первом и втором канале будут сигналы соответственно:
После захвата и оцифровки сигналы проходят через фильтр Гильберта, в результате получаем две пары квадратур, вид которых показан на рис. 3. :
Рис. 3. Две квадратуры сигнала Далее получим две составляющие сигнала следующим образом:
Согласно основному тригонометрическому тождеству: 9
(1)
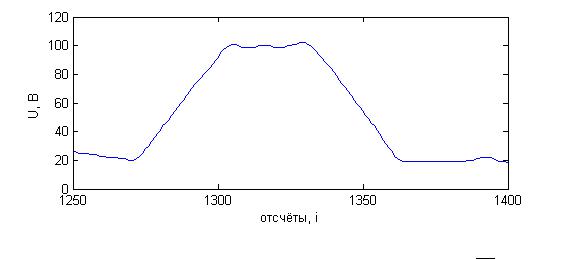
Корень четвёртой степени из этого выражения есть мгновенное значение амплитуды сигнала. Пропуская результат через КИХ фильтр получим огибающую сигнала, вид которой показан на рис. 4. Фильтр описывается уравнением:
С импульсной характеристикой вида |
, где n – количество отсчётов |
||
импульсной характеристики. |
|
|
|
|
|
|
|
|
|
|
|
Рис. 4. Огибающая сигнала на выходе фильтра с ИХ h[n] =
В данном алгоритме мы можем говорить о возможном наличии сигнала когда мгновенная амплитуда, отфильтрованная последовательно двумя КИХ-фильтрами с ИХ
соответственно и превышает некий порог, напрямую зависящий
от оценки шумов.
Для оценки шумов и формирования адаптивного порога, показанного на рис. 5,
используется КИХ-фильтр с ИХ . Чтобы полезный сигнал не участвовал в
оценке шумов, отсчеты для этого фильтра отстают на величину, равную сумме длин фильтров, участвующих в формировании оценки сигнала, т.е. в данном случае задержка Z
равна:
10