

Датчик линейного ускорения кратко, Ардашева
.docxМетодология построения измерительных преобразователей линейного ускорения
Применение данных устройств основано на их способности преобразования статического и динамического ускорения в электрическую величину (емкость, сопротивление, напряжение и др.)
Схематично, параметры, измеряемые датчиками ускорения, можно сгруппировать в следующие классы:
-измерение вибрации: объект вибрирует, если он производит колебательные движения относительно положения равновесия
-измерение ударных ускорений: внезапное возбуждение структуры, создающее резонанс.
-измерение движения: медленное перемещение со скоростью от доли секунды до нескольких минут.
-сейсмоисследования: измерения малых перемещений и низкочастотной вибрации.
Принцип работы датчиков ускорения можно описать следующим образом. При воздействии ускорения на датчик чувствительный элемент смещается за счет инерции. Если акселерометр механический, то смещение чувствительного элемента преобразуется в смещение стрелки прибора. Если в качестве выходной величины используется электрический сигнал, то на выходе преобразователя смещения генерируется электрический сигнал, который далее преобразуется для использования в различных системах автоматического управления.

Датчик ускорения состоит из чувствительного элемента (ЧЭ) и подсоединенного к нему преобразователя механического смещения. ЧЭ представляет собой инерциальную массу, закрепленную на упругом подвесе на корпусе датчика.
При воздействии ускорения на датчик чувствительный элемент смещается за счет инерции.
в соответствии с законом Фарадея, магнит, двигающийся в катушке индуктивности, приводит к возникновению в ней напряжения. Это напряжение пропорционально скорости движения магнита и силе поля. Линейные датчики скорости построены на этом принципе магнитной индукции. В их состав входит постоянный магнит и катушка индуктивности определенной формы. Выходное напряжение на катушке прямо пропорционально относительной скорости магнита в пределах рабочей зоны. Т.к. линейные датчики способны измерять ускорение только в пределах своих габаритных размеров, их часто используют для измерения вибраций.


Схема пружинного акселерометра
При отсутствии ускорений натяжение пружин одинаково и масса располагается в среднем (нейтральном) положении. Если объект движется с постоянным линейным ускорением х, то масса перемещается на некоторую величину, при которой инерционная сила Рин, возникающая вследствие ускоренного движения массы в абсолютном пространстве, уравновешивается силой Рупр упругости пружин.
Для успокоения колебаний инерционной массы в переходном режиме служит демпфер 4, создающий силу, пропорциональную скорости перемещения массы относительно корпуса 3. Применяют магнитоиндукционные, жидкостные или воздушные демпферы.
Интегрирующие акселерометры отличаются тем, что противодействующая сила является не позиционной, а скоростной. Интегрирующие акселерометры могут быть прямого измерения, в которых противодействующая сила создается демпфером со стабильным коэффициентом демпфирования, и компенсационные, в которых для создания противодействующей силы применяется скоростная обратная связь.
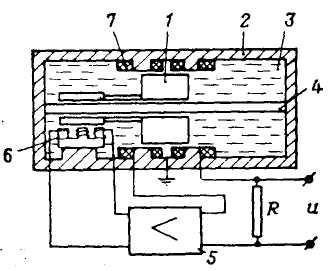
Схема однокомпонентного акселерометра
1 – инерционная масса; 2 – корпус; 3 – жидкость; 4 – направляющий стержень; 5 – усилитель; 6 – индуктивный датчик перемещения; 7 – электромагнитный привод
На схеме рис. 4 сейсмическая масса 1 подвешена на направляющей 4. Для уменьшения трения о направляющую масса 1, помещенная в жидкость 3, имеет нейтральную плавучесть, что исключает сильное прижатие к направляющей. Сигналы в рассматриваемой схеме, пропорциональные перемещению сейсмической массы, измеряются индуктивным датчиком 6. После усиления в усилителе 5 сигнал поступает на электромагнитный (силовой) привод 7. Выходным сигналом акселерометра является падение напряжения и на сопротивлении R, включенном последовательно в цепь обмотки силового привода. Демпфирование в приборе получается за счет сопротивления при движении сейсмической массы в жидкости.В акселерометрах рассматриваемого типа можно получить высокую собственную частоту и малую зону нечувствительности. Последнее достигается уменьшением сил трения за счет взвешивания инерционной массы в жидкости.