

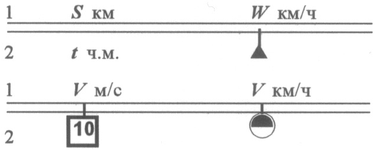
Расчет путевой скорости
Для приближенного расчета путевой скорости используется формула:
W = V ± U cos УВ, где УВ =5- МК.
|
Таблица 2 | |||
|
УВ попутные ветры |
cos УВ попутные |
cos УВ встречные |
УВ встречные ветры |
|
0 |
+ 1,0 |
-1,0 |
180 |
|
30, 330 (-30 ) |
+0,9 |
-0,9 |
150, 210 (-150) |
|
60, 300 (-60 ) |
+0,5 |
-0,5 |
120, 240 (120) |
|
90, 270 (-90 ) |
0,0 |
0,0 |
90, 270 (-90) |
РАСЧЕТЫ "В УМЕ" ПРОЙДЕННОГО РАССТОЯНИЯ S ПО СКОРОСТИ W И ВРЕМЕНИ t
Необходимо знать , что расстояние, пройденное за 6 мин, равно по величине скорости полета в км/ч без последнего 0.
Например: W равна 100 км/час, значит за 6 мин будет пройдено 10 км, а за 3 мин - 5 км. Этим же правилом необходимо воспользоваться и при расчете скорости W и времени t. РАСЧЕТЫ "В УМЕ" СКОРОСТИ W ПО ИЗВЕСТНЫМ S И t
В данном случае необходимо определять пройденное расстояние за 6 мин.
Например: за 3 мин пройдено 5 км, за 6 мин - 10 км, значит W равна 100 км/час
РАСЧЕТЫ "В УМЕ" ВРЕМЕНИ t ПО ИЗВЕСТНЫМ S И W
В этом случае необходимо уметь рассчитать пройденный путь за 1 мин.
Например: W равна 120 км/час, значит за 6 мин будет пройдено 12 км, за 3 мин - 6 км, за 1 мин - 2 км.
ПЕРЕВОД V м/с В V км/ч
Для пересчета скорости необходимо V м/с умножить на 4 и отнять целые десятки.
Например: скорость ветра равна 10 м/с, пересчитать в км/ч.
Решение: 10 м/с х 4 = 40; 40 - 4 = 36 км/ч
ПЕРЕВОД V км/ч В V м/с
Пересчет производится по формуле:
V м/с = V км/ ч : 4 + 10% от частного
Например: скорость равна 160 км/ч, пересчитать в м/с.
Решение: 160 км/ч : 4 = 40; 40 + 4 = 44 м/с.
Все перечисленные задачи можно решать на навигационной линейке, используя шкалы 1 и 2.
ИЗМЕРЕНИЕ КУРСА САМОЛЕТА
Курс самолета - важнейший навигационный элемент. Без знания его не будет решена ни одна навигационная задача. От точности и надежности измерения курса зависит точность, надежность и безопасность самолетовождения.
Для измерения курса на самолетах используются разные курсовые системы или простые магнитные компасы. Курс может быть истинным и магнитным.
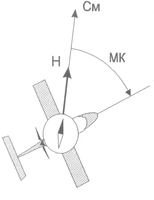
Истинный курс - ПК измеряется от северного направления истинного меридиана до продольной оси самолета (см. рис.5). Магнитный курс - МК измеряется от северного направления магнитного меридиана до продольной оси самолета.
Угол между истинным и магнитным меридианами называется магнитным склонением AM. Магнитное склонение отсчиты-вается от истинного меридиана к магнитному вправо (к востоку) со знаком плюс, влево (к западу) со знаком минус
ИК = МК + (±АМ) МК = ИК - (±АМ).
Магнитный компас автономен и позволяет непосредственно измерять магнитный курс самолета. Работа компаса основана на использовании магнитного поля Земли, действие которого воспринимается чувствительным элементом. Земля обладает магнитным полем, аналогично полю гигантского магнита, помещенного внутри земного шара.
Измерение курса самолета с помощью магнитного компаса заключается в том , что с помощью чувствительного элемента магнитного компаса определяется направление горизонтальной составляющей магнитного поля Земли, а затем измеряется угол между направлением горизонтальной составляющей (магнитным меридианом ) и продольной осью самолета (рис.10). Но на чувствительный элемент действует не только магнитное поле Земли, но и магнитное поле самолета, вызывая погрешности (девиацию) К в его показаниях
АК = МК - КК.
Магнитное поле самолета создается ферромагнитными деталями конструкции самолета и постоянными токами электрооборудования.
Известно, что наибольшая часть девиации создается силами магнитного поля твердого железа. Эти силы создают полукруговую девиацию.
Магнитное поле, создаваемое твердым железом, будет постоянным, вектор напряженности этого поля не изменит своего положения относительно самолета.
Для компенсации девиации на магнитных компасах устанавливаются магнитные девиационные приборы. В девиационном приборе в латунных валиках запрессованы две пары небольших магнитов: одна пара для создания силы, направленной по продольной оси самолета, вторая - по поперечной. Величина и знак силы (плюс или минус) регулируются с помощью двух винтов, обозначенных буквами С - Ю и В - 3. При вращении того или иного винта изменяется взаимное расположение магнитов и тем самым регулируются силы, создаваемые ими для компенсации полукруговой девиации.
Установочная ошибка магнитного датчика, включающая и постоянную девиацию, компенсируется поворотом корпуса магнитного датчика вокруг вертикальной оси на угол, равный по величине установочной ошибке. Если ошибка имеет знак плюс, датчик поворачивается вправо (по часовой стрелке) и наоборот.
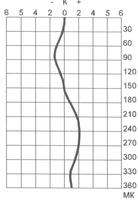
После компенсирования полукруговой девиации и установочной ошибки погрешности магнитного компаса значительно уменьшаются, но не устраняются полностью, так как остается еще четвертная девиация, так называемая остаточная девиация AKt.
В магнитных компасах остаточная девиация не устраняется, ее величина обычно определяется на восьми курсах, кратных 45 градусам (0, 45, 90, 135, 180, 225, 270, 315), и по найденным значениям составляются графики (рис. 11) или таблицы остаточной девиации.
В практике девиационных работ для того, чтобы несколько упростить вычисления, с помощью девиационного прибора девиация компенсируется до 0, на магнитном курсе 0 винтом С-Ю, на 90 градусов винтом В-3.
На магнитном курсе 180 градусов винтом С-Ю и на курсе 270 винтом В-3 скомпенсировать девиацию до половины ее значения на этих курсах.
Установочная ошибка определяется по формуле:
А = (АК180+АК270)/4
где: AK180 и К270 - девиация на курсах 180° и 270° до ее компенсации.
Определение магнитного курса самолета на земле при выполнении девиационных работ производится с помощью девиационного пеленгатора.