

4 раздел Векторное управление
.pdfРаздел 4
СИСТЕМЫ ВЕКТОРНОГО УПРАВЛЕНИЯ ЧАСТОТНО-РЕГУЛИРУЕМОГО АСИНХРОННОГО ЭЛЕКТРОПРИВОДА
4.1 Необходимые понятия
Синтез систем ПЧ-АД с частотным управлением из-за сложности математического описания переходных процессов в частотных преобразователях типа НПЧ, АИН и АИТ, и особенно в асинхронном двигателе, являющимся многоканальным объектом регулирования с большим количеством нелинейных перекрестных связей, невозможно проводить традиционными способами, основанными на линеаризации дифференциальных уравнений звеньев системы. Очень сложными и малоэффективными являются методы, позволяющие непосредственно учитывать электромагнитные переходные процессы, происходящие в АД.
В 70-е годы прошлого столетия, как отмечалось, сформировался новый подход к синтезу систем электропривода с преобразователями частоты,
основанный на полных дифференциальных уравнениях асинхронного двигателя, записанных на основе теории обобщенной электрической машины
[1]. Такой подход позволил упростить анализ характеристик электропривода,
производить синтез его элементов и осуществлять векторное управление
системами асинхронного электропривода.
Векторное управление основывается на использовании при управлении не скалярных величин управляемых координат электропривода, как это делается в системах 'постоянного тока, а их векторных величин, имеющих определенное пространственное расположение. При этом управляемые координаты электропривода, измеренные в неподвижной системе координат,
преобразуются к вращающейся системе координат, в которой координаты
электропривода рассматриваются как векторные величины. Из этих векторных величин, представленных в виде проекций на вращающиеся оси координат,
путем координатных преобразований выделяются пропорциональные им постоянные величины координат электропривода, которые и используются в качестве сигналов управления в системе электропривода.
Векторное управление частотно-регулируемого асинхронного электропривода связано как с изменением частоты и текущих значений переменных АД, так и со взаимной ориентацией их векторов в полярной или декартовой системах координат. За счет регулирования амплитудных значений переменных и углов между их векторами обеспечивается полное управление АД как в статике, так и в динамике, что дает заметное улучшение качества переходных процессов по сравнению со скалярным управлением. Именно этот факт и является определяющим при выборе систем с векторным управлением
[8, 9].
Информация о текущих значениях и пространственном положении векторов переменных АД может быть получена как прямым их измерением с помощью соответствующих датчиков, так и косвенно на основе математической модели АД. Конфигурация и сложность такой модели определяются техническими требованиями к электроприводу. В общем случае подобные системы с косвенным регулированием координат электропривода из-
за нестабильности параметров АД и сложной их взаимосвязи уступают по своим статическим и динамическим показателям системам с прямым векторным управлением.
Вместе с тем, при сложности вычислительных операций и алгоритмов управления электроприводом достоинство систем с косвенным регулированием заключается в простоте технических решений и, следовательно, в практической надежности. При векторном управлении АД может питаться как от источника напряжения, так и от источника тока. При этом обеспечивается стабилизация магнитного потока, момента и скорости двигателя. Только при векторном
управлении удобнее оценивать магнитный поток по потокосцеплению ротора,
величина которого может быть измерена с помощью датчиков Холла. Вариант
частотно-токового векторного управления является наиболее распространенным, поскольку при регулировании тока независимо от частоты питания АД обеспечивается регулирование и его момента. Это не только упрощает схему управления, но и одновременно ограничивает перегрев двигателя. При этом напряжения на обмотках статора АД устанавливаются автоматически в зависимости от его режима работы.
Таким образом, при векторном управлении системой электропривода ПЧ-
АД обеспечивается стабилизация потокосцепления ротора, момента и скорости ротора двигателя. Информацией для управления является информация о мгновенных значениях и пространственном положении вектора потокосцепления ротора в воздушном зазоре двигателя, а также мгновенных значений напряжения и тока статора и скорости двигателя.
4.2 Физические основы и уравнения обобщенной электрической
машины
Несмотря на многообразие типов электрических машин, их действие основано на едином принципе, определяемом законами электромагнитной индукции. Это дает возможность обобщить свойства большинства машин, в
частности АД, СД и МДП, в единой модели. Электрическая схема такой модели, называемой часто двухфазной двухполюсной обобщенной электрической машиной (ОЭМ) [1], изображена на рис.4.1.
Обобщенная двухфазная машина имеет на статоре (система координат
α-β) и роторе (система координат d-q) по две обмотки, сдвинутые в пространстве на угол 90°. Такая машина является эквивалентом любой электрической машины с n-фазной обмоткой статора и m-фазной обмоткой ротора при условии равенства полных сопротивлений обмоток статора (ротора).
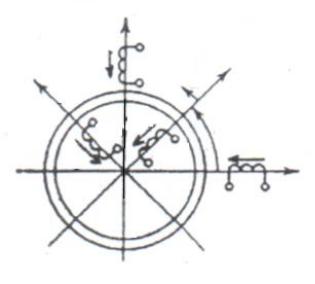
В этом случае процессы в многополюсной машине аналогичны процессам в двухполюсной. При некоторых ограничениях любая машина независимо от числа фаз на статоре и роторе приводятся к двухфазной машине.
is,β
q
ur,q
ir,q
β
us,β
ωd
ir,d |
|
x |
|
|
|
|
|
|
ur,d |
is,α |
α |
|
|
||
|
|
|
|
|
|
us,α |
|
Рисунок 4.1 – Принципиальная схема двухфазной двухполюсной обобщенной электрической машины
Обобщенная машина является идеализированной. Для нее приняты следующие допущения:
1) магнитодвижущие (или намагничивающие) силы (МДС), созданные фазными токами, синусоидально разделены вдоль окружности воздушного зазора, т.е. не учитывается влияние высших пространственных гармоник магнитного поля;
2)машина симметрична, т.е. фазные обмотки имеют одинаковое число витков, а оси фазных обмоток статора и ротора сдвинуты ровно на 90°;
3)не учитывается влияние пазов, но машина может быть явнополюсной;
4)насыщение и потери в стали отсутствуют;
5)не учитываются емкости внутри обмоток и между ними, т.е.
энергия электростатического поля равна нулю;
6)параметры обмоток – приведенные.
Отметим, что записи дифференциальных уравнений, описывающие процессы электромеханического преобразования энергии в обобщенной машине в неподвижных осях α-β и подвижных осях d-q, являются частными случаями математического описания процессов машины. В общем случае уравнения записываются относительно производных координатных осей,
например 1-2, вращающихся с произвольной скоростью ωк, из которых можно получить любые частные случаи работы обобщенной электрической машины.
Дифференциальные уравнения всегда могут быть записаны в комплексной векторной форме, если принять ось 1 за действительную, а ось 2 –
за мнимую.
Вначале рассмотрим частные случаи математического описания процессов в обобщенной машине.
Для каждой фазы статора и ротора обобщенной электрической машины на основании второго закона Кирхгофа можно записать:
|
|
Rsis,α |
|
|
|
|
d |
|
s,α ; |
|||||||
Us,α |
|
|
|
|
|
|
||||||||||
|
|
dt |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
||
U |
|
R i |
|
|
|
|
|
|
|
; |
|
|||||
|
|
|
|
|
|
|
|
|||||||||
|
s,β |
s s,β |
|
dt |
|
|
s,β |
|
|
(4.1) |
||||||
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
||
U |
|
R i |
|
|
|
|
|
|
; |
|||||||
|
|
|
|
|
|
|||||||||||
|
r,d |
r r,d |
|
|
|
|
dt |
|
|
|
|
r,d |
|
|||
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
||
U |
|
R i |
|
|
|
|
|
. |
||||||||
|
|
|
|
|
|
|||||||||||
|
r,q |
r r,q |
|
|
|
dt |
|
|
|
r,q |
|
|
||||
В (4.1) выражения для потокосцеплений имеет вид:
s,α Lsis,α Mαd ir,d Mαqir,q ; |
|
|
Lsis,β Mβd ir,d Mβqir,q ; |
s,β |
|
|
(4.2) |
r,d |
Lrir,d M dαis,α M dβis,β ; |
|
Lrir,q M qαis,α M qβis,β . |
r,q |
|

Подставив (4.2) в (4.1), получим векторно-матричное уравнение для напряжений фазных обмоток статора и ротора:
Uф Lф Iф
или
|
|
|
|
|
|
R |
d |
L |
|
|
|
0 |
|
|
|
|
d |
|
M |
d |
|
|
d |
|
M |
q |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
s |
|
|
dt |
s |
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
Us, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
is, |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
R |
d |
|
|
|
d |
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
0 |
|
|
L |
|
|
M |
d |
|
|
M |
q |
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
Us, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
is, |
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
dt |
s |
|
|
dt |
|
|
|
|
dt |
|
|
|
|
|
|
|
. |
(4.3) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
Ur,d |
|
|
|
d |
|
M d |
|
|
d |
|
M d |
Rr |
|
d |
|
Lr |
|
|
|
0 |
|
|
|
|
ir,d |
|
|
|
|||||||||||||||
|
|
Ur,q |
|
|
|
|
dt |
|
|
|
dt |
|
|
dt |
|
|
|
|
|
|
|
|
|
ir,q |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
d |
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
M |
q |
|
|
M |
q |
|
|
|
|
|
0 |
|
|
|
R |
L |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
dt |
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
dt |
r |
|
|
|
|
|
|
|
|||||
В формулах (4.1)÷(4.3) обозначены: Us, , |
|
Us, , Ur,d , |
Ur,q , is, , |
is, , |
|||||||||||||||||||||||||||||||||||||||||
ir,d , ir,q – соответственно |
фазные напряжения и токи обмоток статора и |
||||||||||||||||||||||||||||||||||||||||||||
ротора; Rs , Rr |
и Ls , |
Lr |
– соответственно |
|
активные сопротивления и |
||||||||||||||||||||||||||||||||||||||||
индуктивности (коэффициенты самоиндукции) обмоток статора и ротора; M d
, Md , M d , M d , M q , Mq , M q , Mq – взаимные индуктивности
(коэффициенты самоиндукции) соответствующих обмоток статора и ротора.
Необходимо отметить, что индуктивности и взаимные индуктивности фазных обмоток статора и ротора есть функции угла поворота ротора X (см.
рис. 4.1).
Электромагнитная энергия, запасенная обмотками обобщенной машины,
определяющаяся соотношением:
W |
1 |
( |
s, |
i |
|
s, |
i |
|
|
i |
|
|
i |
) . |
(4.4) |
|
r,d |
r,q |
|||||||||||||
эм |
2 |
|
s, |
|
s, |
|
r,d |
|
r,q |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Уравнения для электромагнитного момента машины М могут иметь различную форму в зависимости от используемых переменных состояния машины. В частности, когда в качестве основных переменных выбраны токи и потокосцепления статора и ротора, для электромагнитного момента с учетом
(4.4) можно записать:
M |
Wэм |
Z |
p |
|
Wэм |
, |
(4.5) |
|
|
||||||
|
Xм |
|
X |
|
|||
|
|
|
|
||||
где xм x / Z p – механический угол поворота ротора относительно статора,
рад; Z p Рп – число пар полюсов фазной обмотки статора (для ОЭМ Z p 1).
Уравнение движения обобщенного привода:
|
J |
d м |
|
|
J |
|
|
d |
M Mc , |
(4.6) |
|
|
|
||||||||
|
|
|
Z p |
|
||||||
|
|
dt |
|
dt |
|
|||||
где м dx / dt |
– механическая скорость ротора, рад/с; J |
– момент инерции |
||||||||
ЭП, приведенный к валу АД, кг м2 ; M |
c |
– момент сопротивления на валу АД, |
||||||||
|
|
|
|
|
|
|
|
|
|
|
Н м .
Уравнения (4.3) ÷ (4.6) образуют полную систему уравнений обобщенной машины.

bs |
β |
|
q |
us,b |
d |
|
||
|
|
|
|
|
ω |
ur,b |
ar |
x |
|
|
|
br |
ur,a |
as(α) |
|
us,a |
|
|
|
|
|
ur,с |
|
us,c |
cr |
|
|
|
|
cs |
|
|
Рисунок 4.2 − Принципиальная схема трехфазной двухполюсной асинхронной электрической машины
4.3 Приведение трехфазного асинхронного двигателя к двухфазной математической модели
4.3.1 Краткий обзор традиционных способов управления АД
Наибольшее применение в промышленном электроприводе находят трехфазные асинхронные двигатели (АД) двух типов: короткозамкнутые и с фазным ротором. У короткозамкнутых АД энергия подводится к статору от внешнего источника, а к ротору − через воздушный зазор от статора. У АД с фазным ротором энергия от внешнего источника может подводиться как к статору, так и к ротору через контактные кольца и щетки.
Регулирование энергии, подводимой к АД, производится с помощью силового регулирующего органа. Свойства последнего оказывают существенное влияние на характеристики электропривода в целом, а также определяют методику исследования конкретного типа электропривода. Так, в
некоторых случаях, возможно, рассматривать асинхронную машину как самостоятельный объект управления системы. В других же случаях асинхронную машину нельзя отделить от силового регулирующего органа, и
тогда целесообразно рассмотреть их совместно как единый объект управления.
В связи с этим дадим краткий обзор традиционных асинхронных электроприводов [3, 4].
В традиционных ЭП используются следующие основные способы управления АД: параметрическое, и в частности фазовое, частотное и каскадное.
Параметрическое управление заключается в изменении параметров внешних резисторов, реакторов и конденсаторов, подключаемых к фазам статора и ротора. При фазовом управлении с помощью реакторов насыщения или тиристоров изменяется напряжение статора. Параметрический способ неэкономичен и не пригоден для длительного глубокого регулирования скорости.
При частотном управлении производится согласованное изменение частоты и напряжения статора короткозамкнутого АД. Этот способ экономичен, обеспечивает достаточно широкий диапазон регулирования и в зависимости от типа применяемого преобразователя частоты (ПЧ) позволяет перекрывать область как сверхнизких (до 10-1 рад/с), так и сверхвысоких (до
104 рад/с) частот вращения.
Каскадное управление сводится к тому, что цепь статора двигателя подключается к сети, а в цепь ротора вводится дополнительная ЭДС. Эта ЭДС может быть введена с помощью роторного выпрямителя и машинного агрегата
(так называемые вентильно-машинные каскады) либо с помощью выпрямителя и зависимого инвертора (асинхронно-вентильный каскад − АВК) Асинхронные каскады просты и экономичны, так как обеспечивают рекуперацию мощности скольжения. При небольших диапазонах регулирования (до 2:1÷3:1)
вентильные каскады могут оказаться в целом экономичнее частотного привода и привода постоянного тока. Их специфическим недостатком является сравнительно низкий коэффициент мощности (0,7 и менее), особенно при значительном снижении частоты вращения.

Особым типом каскадных соединений является так называемая машина двойного питания (МДП). Здесь внешняя ЭДС вводится в ротор с помощью ПЧ
(обычно непосредственного). Машина двойного питания экономична, она перекрывает диапазон частот вращения с границами, отстоящими примерно на
30% вверх и вниз от синхронной. Преимущество МДП перед другими каскадами и частотным приводом − высокий коэффициент мощности в указанном диапазоне частот вращения.
Среди рассмотренных традиционных приводов наибольшее распространение получили АВК, частотно регулируемый привод (НПЧ-АД) и
МДП.
Вентильный каскад как объект управления близок к приводу постоянного
тока.
С и с те м ы НПЧ-АД и МДП являются наиболее универсальными среди традиционных асинхронных приводов. Так как оба этих привода содержат в качестве объекта регулирования АД, а в качестве силового регулирующего органа − НПЧ, то к ним применимы единые методы анализа и синтеза.
4.3.2 |
Математическая |
модель |
симметричной |
трехфазной |
двухполюсной асинхронной машины в обобщенной векторной форме
Принципиальная схема симметричной трехфазной двухполюсной
(z p 1) , асинхронной машины приведена на рис. 4.2.
Баланс напряжений для такой машины, согласно рис. 4.2 и второму закону Кирхгофа может быть определен следующими векторными уравнениями:
|
|
s |
|
|
|
|
|
R |
|
|
|
I |
s |
|
|
|
|
|
d |
|
|
|
|
|
|
|
s |
|
;. |
(4.7) |
|||||||||
U |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
r |
|
|
|
|
R |
|
|
I |
r |
|
|
|
|
|
d |
|
|
|
|
|
|
|
r |
|
; . |
(4.8) |
|||||||||||
|
U |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||