

Andrieiev_Teoretychna_mekhanika_2014
.pdfУ файлі вихідних даних прийняті наступні позначення: x1, fi2, fi3, xc4, fi4 – координати, за допомогою яких описується рух елементів системи (між цими координатами існують зв’язки відповідно до формули (4.12)); P1, P4, Mtr – проекції активних сил і моментів на вказані координати (згідно з формулою (4.14)); J3, J3, J4 – моменти інерції тіл системи, які здійснюють обертальний або плоскопаралельний рухи; v1, a1 – швидкість та прискорення точок тіла 1; vc4, a4 – швидкість та прискорення центра мас тіла 4; omega2, omega3, omega4 – кутові швидкості тіл системи, які здійснюють обертальний або плоскопаралельний рухи; epsilon2, epsilon2, epsilon2 – кутові прискорення тіл системи, які здійснюють обертальний або плоскопаралельний рухи; r – параметр геометричних розмірів (може набувати будь-якого значення); m – масовий параметр (може набувати будь-якого значення); R2, r2, R3, r3, R4 – радіуси відповідних елементів системи; ro2, ro3 – радіуси інерції складених тіл обертання; m1, m2, m3, m4 – маси елементів системи; f – коефіцієнт тертя ковзання (для тіла 1); f1 – коефіцієнт третя кочення (для тіла 2); alfa, betta – кути нахилу відповідних площин; S – шлях, який проходить тіло 1; Ts – кінетична енергія системи як функція часу (згідно з формулою (4.10)); A – сумарна робота активних сил, як функція часу (згідно з формулою (4.10)); dT – похідна за часом від кінетичної енергії системи як функція часу (згідно з формулою (4.20)); Ws – сумарна потужність активних сил, як функція часу (згідно з формулою (4.21)); v1k – значення швидкості точок тіла 1, яке одержане аналітично (згідно з формулою (4.17)); T’ – коефіцієнт T * з формули (4.17); Ak – значення сумарної роботи активних сил, яке відповідає тому моменту часу, коли координата x1 досягне значення S (згідно з формулою (4.16)); Tk – значення кінетичної енергії системи, яке відповідає тому моменту часу, коли координата x1 досягне значення S (згідно з формулою (4.16)); a1k – значення прискорення точок тіла 1, яке одержане аналітично (згідно з формулою (4.23)); dT’ – коефіцієнт T * з формули (4.20); W’ – коефіцієнт W * з формули (4.22);
141
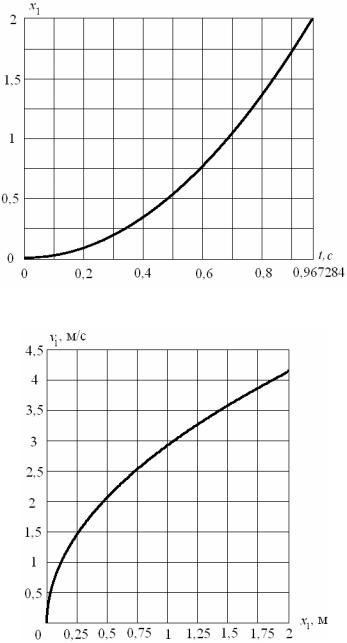
dTk – значення похідної від кінетичної енергії, яке відповідає тому моменту часу, коли координата x1 досягне значення S (згідно з формулою (4.20)); Wk – значення сумарної потужності активних сил, яке відповідає тому моменту часу, коли координата x1 досягне значення S (згідно з формулою (4.22)); tk – кінцевий момент часу (у даному випадку підібраний таким чином, щоб значення координати x1 дорівнювало S). В інструкції «КОНЕЧНЫЕ УСЛОВИЯ» вказано два записи («x1(S), t(tk)»), тому інтегрування закінчиться або коли координата x1 досягне значення S, або коли час – величини tk. В данному випадку виконана перша умова (рис. 4.13). На рисунку 4.14 наведено залежність швидкості тіла 1 від його переміщення. Значення швидкості, яке відповідає переміщенню x1 S співпадає із значенням, одержаним аналітично (див. п. 4.2.1). Більш наочне порівняння можна зробити, якщо побудувати у одному масштабі з графіком v1 t лінію, яка відповідає значенню швидкості v1k тіла 1, одержаному аналітично (рис. 4.15).
У момент часу t* = 0,967284 с графік v1 t перетинається із лінією, яка відповідає v1k , що свідчить про правильність аналітичних розрахунків, проведених у п. 4.2.1. Також наведено графік залежності швидкості центра мас котушки 4 від часу (див. рис. 4.15). Слід відзначити, що швидкість тіла 1 та швидкість центра мас котушки 4 залежать від часу лінійно.
Далі наведемо інші основні результати розрахунків. На рисунку 4.14 представлено залежність кутових швидкостей тіл 2 та 3 та миттєвої кутової швидкості котушки 4 від часу, а на рисунку 4.15 – відповідно залежності кутових прискорень. Аналізуючи ці результати, можна зробити висновок, що елементи механічної системи рухаються рівноприскорено.
Крім цього, засоби ПК КіДиМ дозволяють наочно переконатися у виконанні загальних теорем динаміки механічних систем. Для цього слід побудувати у однаковому масштабі графіки залежності від часу кінетичної енергії та роботи, похідної від кінетичної енергії за часом та потужності. Текст файлу вхідної інформації (див. табл. 4.5) надає таку можливість. Якщо розглянути порівняння кінетичної енергії Ts та ро-
142
боти A, можно переконатися, що їхні графіки співпадають, так само співпадають графіки похідної за часом від кінетичної енергії dT та потужності Ws.
На рисунках 4.18 та 4.19 наведено порівняння для кінетичної енергії та потужності із відповідним значеннями, одержаними аналітично для моменту часу t* = 0,967284 с. Збіг значень у кінцевий момент часу свідчить про правильність проведеного розв’язку.
Рисунок 4.13 – Залежність переміщення тіла 1 від часу
Рисунок 4.14 – Залежність швидкості тіла 1 від переміщення
143
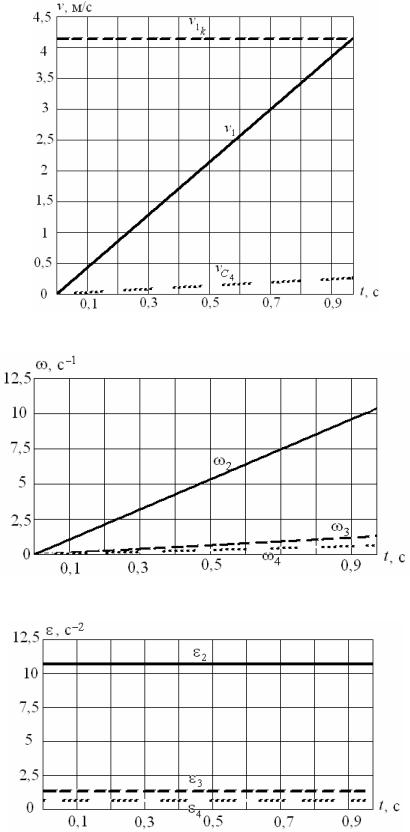
Рисунок 4.15 – Порівняння швидкостей
Рисунок 4.16 – Порівняння кутових швидкостей
Рисунок 4.17 – Порівняння кутових прискорень
144

Рисунок 4.18 – Порівняння кінетичної енергії, підрахованої аналітично Tk та кінетичної енергії як функції часу Ts
Рисунок 4.19 – Порівняння потужності, підрахованої аналітично Wk та потужності як функції часу Ws
145
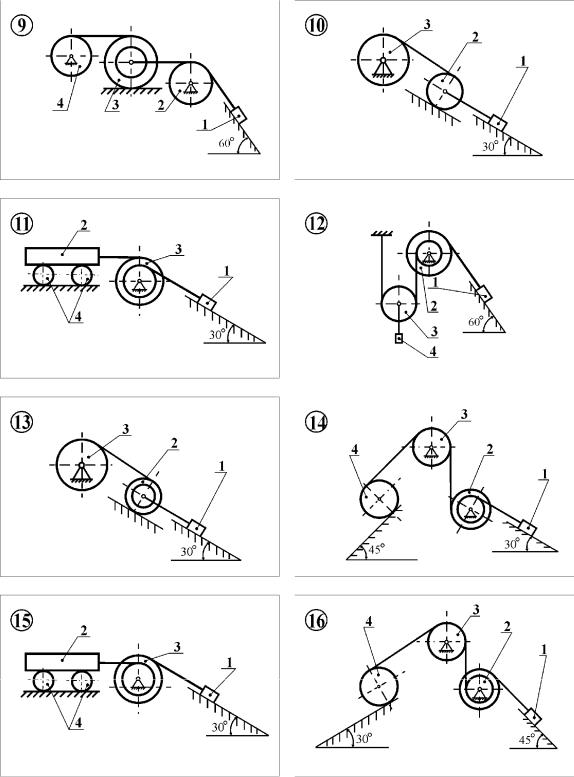
4.2.3. Завдання для самостійної роботи. Для варіантів механіч-
них систем (див. табл. 4.5) та вихідних даних (табл. 4.6) необхідно:
1) встановити кінематичні в’язі між елементами механічних сис-
тем;
2)записати вирази для кінетичної енергії системи, потужності системи та роботи сил;
3)використовуючи теореми про зміну кінетичної енергії системи, визначити швидкість та прискорення тіла 1;
4)скласти файл вихідної інформації для ПК КіДиМ;
5)дослідити рух механічної системи.
146
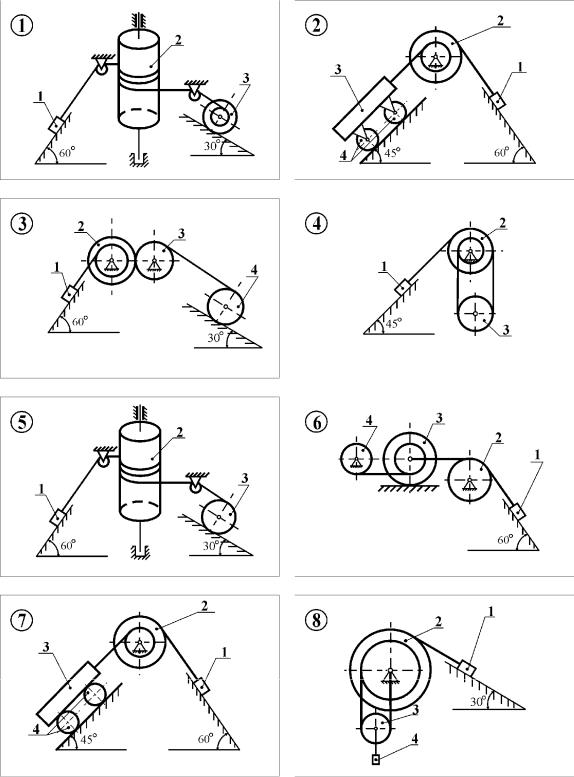
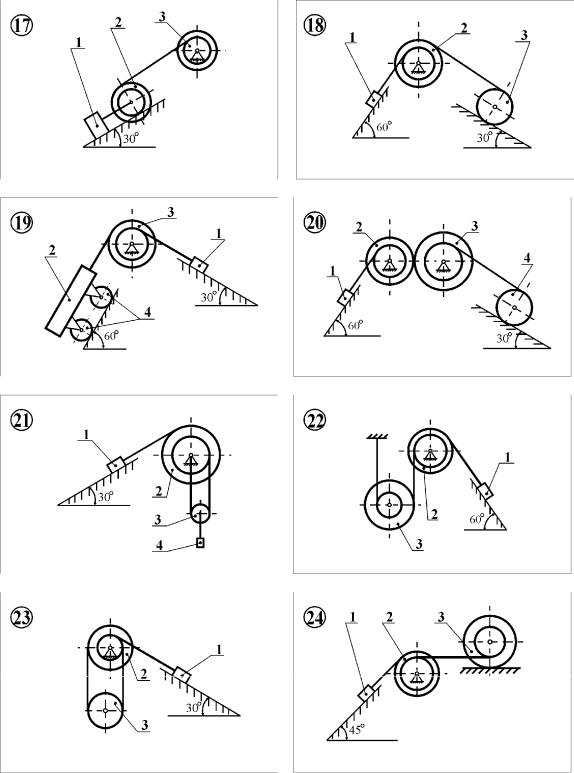
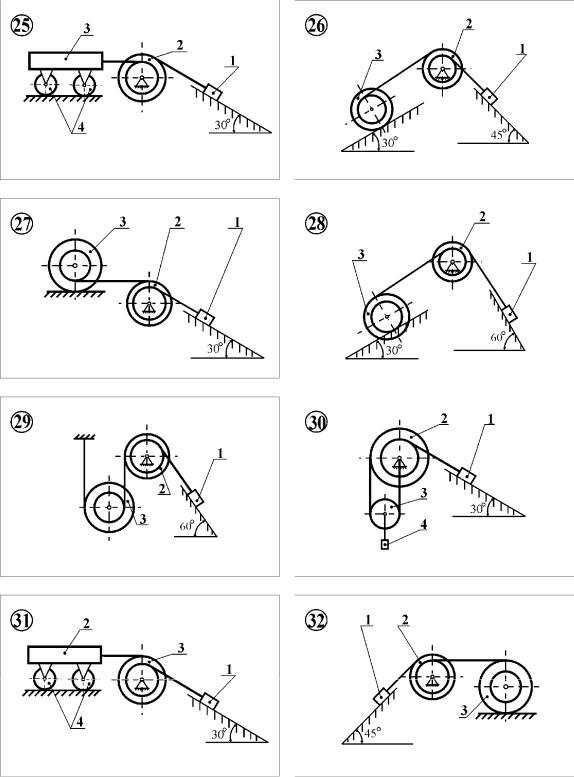
Таблиця 4.5 – Варіанти завдань для аналізу руху механічних систем
147
Продовження табл. 4.5
148
Продовження табл. 4.5
149
Продовження табл. 4.5
150