

1.2. Построение планов скоростей механизма
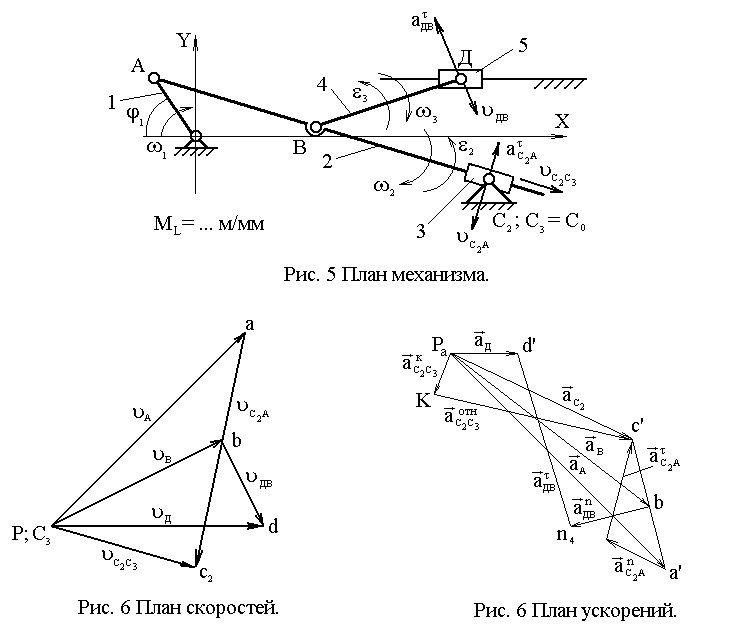
Рассмотрим пример для одного положения механизма. Для этого строим план механизма в заданном положении и в выбранном масштабе длин МL (рис.5).
Вычисляется скорость точки А кривошипа:
VA = W1 . LOA ,м/с.
Вектор скорости VA направлен перпендикулярно прямой ОА (кривошипа) в сторону вращения кривошипа.
Скорость VC2 точки С звена 2 определяется графическим построением следующих векторных уравнений (т.е. построением планов скоростей):
VC2 = VA + VC2A;
VC2 = VC3 + VC2C3.
Здесь вектор скорости VC2A направлен перпендикулярно прямой AC2, но пока неизвестна величина этой скорости; скорость VC3 = 0; вектор скорости VC2C3 направлен параллельно прямой AC2, но величина этой скорости также пока неизвестна.
Для определения неизвестных величин скоростей строим план скоростей в следующей последовательности. Из произвольно выбранной точки – так называемого полюса РV – перпендикулярно ОА проводится отрезок РVa произвольной длины (рис.6). Тогда масштаб плана скоростей вычисляется по формуле
MV = VA/РVa, м/с/мм,
где РVa - длина отрезка, мм, изображающая на плане скоростей вектор скорости VA.
Из точки a перпендикулярно прямой АС2 проводится луч. Через полюс РV проводится второй луч параллельно прямой АС2. В месте их пересечения получаем точку с2. Вектор РVс2 изображает скорость VC2, а вектор ас2 – скорость VC2A. Вычисляются величины скоростей по формулам
VC2 = (РVс2) . MV;
VC2A = (ас2) . MV, м/с.
Здесь длины отрезков РVс2 и ас2 взяты из плана скоростей. Вычисляем угловую скорость кулисы 2:
W2 = VC2A/LAC2, 1/с.
Здесь LAC2 = (AC2) . ML, м, а величина АС2 в мм берется из плана механизма.
Определяется скорость точки В, принадлежащей кулисе 2. Для этого используется теорема подобия: Отрезки относительных скоростей на плане скоростей образуют фигуру, подобную соответствующей фигуре на плане механизма.
В соответствии с ней составляется уравнение пропорции
АС2/ас2 = AB/ab.
Здесь длины отрезков АС2 и АВ берутся в мм из плана механизма, а длина отрезка ас2 – из плана скоростей. Вычисляется длина отрезка ab и откладывается на отрезке ас2 плана скоростей. Полученный вектор (Рvb ) изображает на плане скоростей скорость VB точки В, причем величина скорости точки В вычисляется по формуле
VB = (Рvb ) . MV, м/с.
Определяется скорость точки Д. Для этого составляется векторное уравнение скорости звена 4:
VD = VB + VDB.
Здесь скорость VB уже известна как по величине, так и по направлению, а VDBBD и вектор VD параллелен движению ползуна 5. Для нахождения величин VDB и VD строится план скоростей звена 4 в следующей последовательности. Через точку b плана скоростей проводится линия, перпендикулярная прямой ВD плана механизма, а через полюс РV – прямая, параллельная движению ползуна 5. В месте их пересечения получается точка d. Вычисляются значения скоростей:
VDB = (bd) . MV,
VD = (РVd) . MV, м/с.
Направления векторов скоростей устанавливаются в соответствии с векторным уравнением скоростей.
Далее вычисляется угловая скорость шатуна:
W4 = VDB/LBD, 1/с.
Направления угловых скоростей звеньев W2 и W4 показываются на плане механизма. Планы скоростей строятся для всех 12 позиций. С их использованием вычисляются линейные скорости всех характерных точек механизма (центров кинематических пар, центров масс звеньев и т.д.), угловые скорости звеньев. Результаты расчетов удобно свести в таблицу. Вычисленные скорости нужны в дальнейшем для проведения динамического анализа механизма и расчета маховика (см. лист 4 курсового проекта).