

Министерство высшего и среднего специального образования
РСФСР
Ленинградскй институт авиационного приборостроения
______________________________________________________________
СЕЛЕКЦИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ
Методические указания к выполнению
лабораторной работы
Ленинград
1988
Составители: В.П. Пашкевич, В.А. Ракович
Рецензенты: кафедра радиопередающих и телевизионных устройств Ленинградского института авиационного приборостроения; кандидат технических наук А.Н.Большаков
Приведены краткие сведения из теории. Дано описание лабораторной установки и порядка выполнения работы. Предназначена для студентов радиотехнического факультета.
Подготовлена к публикации кафедрой радиотехнических систем по рекомендации методической комиссии радиотехнического факультета Ленинградского института авиационного приборостроения.
© Ленинградский институт
авиационного приборостроения
(ЛИАП), 1988
_____________________________________________________________________
Подписано к печати 08.07.88 Формат 60x84 1/16 Бумага тип №3
Усл.печ.л. 2,79 Уч.-изд.л.3,0 Тираж 280 экз.
Зак. №482 Печать офсетная Бесплатно____________________
Ротапринт ЛИАП 190000, Ленинград, ул. Герцена, 67
Цель работы:изучение принципов построения, основных технических характеристик и методики экспериментального исследования систем селекции движущихся целей.
Методические указания по подготовке к работе
Перед выполнением лабораторной работы студенты должны получить зачёт по коллоквиуму. При подготовке к коллоквиуму необходимо ознакомиться с разделами 1-3 настоящего руководства, с составом аппаратуры лабораторной установки и задачами экспериментальных исследований.
Назначение систем селекции движущихся объектов (целей)
Среди большого количества отражённых сигналов есть такие, которые в ряде случаев не представляют интереса. Это сигналы, отражённые от зданий, холмов, деревьев, поверхности моря и т.д. Они получили в радиолокации специальное название - пассивные помехи.
Полезными сигналами часто являются отражения от движущихся объектов (например, самолётов). На рис.1 показаны два условных изображения экрана индикатора кругового обзора (ИКО), которые иллюстрируют эффективность селекции движущихся объектов. Рис. 1,а - изображение на экране ИКО при наличии пассивных помех от неподвижных отражателей. Заштрихованная область показывает участок яркой засветки экрана. Рис. 1,б - изображение на экране ИКО после выделения только движущихся объектов (целей).

Принцип действия системы селекции движущихся объектов
Для выделения движущихся целей на фоне пассивных помех используется эффект Допплера, состоящий в том, что несущая частота сигнала, отражённого от движущегося объекта, отличается от несущей частоты передатчика тем более, чем больше радиальная скорость объекта. Физический смысл этого эффекта можно пояснить следующим образом. Пусть передатчик излучает непрерывное колебание частоты fпрд (рис.2).

Если приёмник неподвижен относительно передатчика, то, поскольку скорость распространения радиоволн постоянна, приёмник в единицу времени примет то число колебаний, которое излучает передатчик, т.е. принимаемая частота fпрм = fпрд .
Если же приёмник приближается к передатчику, т.е. движется навстречу распространяющимся колебаниям (набегает на них), то за такое же время он примет некоторое дополнительное число колебаний, которое не смог бы принять оставаясь неподвижным, т.е. fпрм > fпрд. Если же приёмник удаляется от передатчика, то он примет меньшее число колебаний, чем принял бы, оставаясь неподвижным, так как часть колебаний из числа уже поступивших в ту точку, где он находился, ещё не достигнет той точки, в которой находится сейчас. В данном случавfпрм < fпрд .Для активной радиолокации имеет место двукратный эффект Допплера, при этом отклонение принимаемой частоты от излучённой - допплеровская поправкаFд = fпрм ± fизл определяется [1]
![]() , (1)
, (1)
где Vr- радиальная составляющая скорости объекта относительно РЛС;c - скорость распространения радиоволн. Знак минус указывает, что при удалении объекта(Vr > 0) допплеровская поправка имеет отрицательный знак. Часто знак минус опускают.
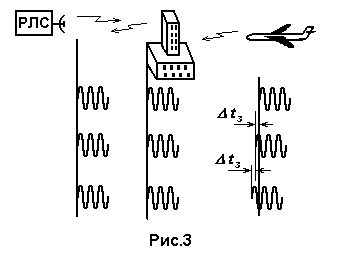
Рассмотрим проявление эффекта Допплера в импульсной РЛС. Если объект неподвижен (здание на рис. 3), то запаздывание отражённого импульса относительно зондирующего постоянно от периода к периоду. Если объект (на рис. 3 самолёт) приближается - запаздывание уменьшается за период на величину tз.
Велико ли это изменение времени запаздывания от периода к периоду? Как его заметить и оценить количественно?
Пусть самолёт приближается со скоростью Vr, и в моментt=0 находится на расстоянииR0 . Тогда расстояние РЛС – самолёт изменяется по закону
R (t)= R0 - Vr(t) (2)
 Закон
движения можно представить в виде
графика в декартовой системе координат
дальность – время. Это прямая АВ (рис.4).
Угол наклона её с осью абсцисс обозначен
через, и численноtg=Vr– радиальной скорости объекта. Моментt1на оси
абсцисс определяет начало излучения
зондирующего импульса, моментt2
– начало приёма отражённого. Будем
условно считать этот импульс первым.
Пунктирными линиями показаны законы
движения излучённого и отражённого
импульсов в координатах дальность –
время. Углы наклона пунктирных линий к
оси абсцисс обозначены через,tgравен скорости распространения радиоволн
(скорости света). Интервалt21
определяет время запаздывания
отражённого сигнала. Второй импульс
излучается в момент времениt3
(t3- t1=Т
период повторения) и принимается в
моментt4(рис. 4). Время его запаздыванияt4з= t4-
t3. Необходимо
определить изменение времени запаздывания
за периодtз=t21- t4з.
Закон
движения можно представить в виде
графика в декартовой системе координат
дальность – время. Это прямая АВ (рис.4).
Угол наклона её с осью абсцисс обозначен
через, и численноtg=Vr– радиальной скорости объекта. Моментt1на оси
абсцисс определяет начало излучения
зондирующего импульса, моментt2
– начало приёма отражённого. Будем
условно считать этот импульс первым.
Пунктирными линиями показаны законы
движения излучённого и отражённого
импульсов в координатах дальность –
время. Углы наклона пунктирных линий к
оси абсцисс обозначены через,tgравен скорости распространения радиоволн
(скорости света). Интервалt21
определяет время запаздывания
отражённого сигнала. Второй импульс
излучается в момент времениt3
(t3- t1=Т
период повторения) и принимается в
моментt4(рис. 4). Время его запаздыванияt4з= t4-
t3. Необходимо
определить изменение времени запаздывания
за периодtз=t21- t4з.

В более крупном масштабе закон движения перенесён на рис. 5. Точки встречи первого и второго импульсов с объектом обозначены через СиDсоответственно и выполнены необходимые построения для определенияtз. Из точкиDпунктиром проведена горизонтальная прямаяDЕ , из точкиF- прямая параллельная прямой, определяющей закон движения первого излучённого импульса. ОтрезокEFчисленно равенtз. Опустим перпендикулярСGна прямуюEF. С одной стороны,
CG=CDtg, (3)
с другой стороны,
CG=GFtg. (4)
Учитывая, что GE=GF=tз /2, а отрезокEDравен промежутку времени между моментами излучения первого и второго импульсов, т.е. периоду повторенияТ, получаем
GD=ED – GE=T - tз /2.
Подставляя значение tg=Vr, иtg=c в (3) и (4) и приравнивая их правые части, имеем
![]()
или
![]() .
.
Так как скорость движущегося объекта мала по сравнению со скоростью света
![]() .
(5)
.
(5)
Интересно отметить, что смещение отражённого импульса в каждом следующем периоде повторения приводит к уменьшению периода повторения отражённых сигналов по отношению к периоду излучённых. Из рис. 5 следует
Тотр=Т-tз .
А это значит, что частота повторения отражённых импульсов больше, чем частота излучённых
![]() .
.
Если бы цель удалялась, частота отражённых импульсов была бы меньше чем излучённых Foтp < F.
Оценим смещение tзколичественно. При радиальной скорости объектаVr= 300 м/с и периоде повторения импульсов Т=10-3с
![]() .
.
Для радиолокатора с длиной волны излучения =10 см период высокочастотных колебаний составляетТ0= 10-9с (одна наносекунда), т.е. смещение сигнала за период на временной оси очень мало и сравнимо с периодом колебаний высокой частоты. Как же "заметить" изменение времени запаздывания сигнала, которое составляет несколько наносекунд. Наиболее "чувствительным" к изменению времени запаздывания является фазовый метод измерения дальности, который сводится к сравнению фазы излучаемого и принимаемого сигналов. Для обеспечения возможности сравнения фаз необходимо иметь стабильный опорный генератор (гетеродин). Опорный гетеродин выполняет две функции: во-первых, задаёт фазу излучаемому импульсу, во-вторых, сохраняет информацию о фазе до прихода отражённого сигнала. Для сравнения фаз можно использовать простейший фазовый детектор, состоящий из сумматора, амплитудного детектора и разделительного конденсатора (рис.6).

"Чувствительность" фазового детектора к изменению временного положения отражённого сигнала иллюстрируется диаграммами иа рис.7. Для импульса (а) задержка (положение импульса на временной оси) такова, что его фаза совпадает с фазой опорного напряжения. Вследствие совпадения фаз в момент воздействия импульса амплитуда на выходе сумматора увеличивается.

После амплитудного детектора и разделительного конденсатора наблюдается видеоимпульс (а) положительной полярности (диаграммаUФД). Для радиоимпульса (б) (пунктир) задержка отличается лишь на половину периода высокочастотных колебаний. При этомимпульс оказывается в противофазе по отношению к опорному напряжению. На выходе сумматора в момент прихода импульса амплитуда напряжения уменьшается. На выходе разделительного конденсатора наблюдается видеоимпульс отрицательной полярности (диаграмма UФД - пунктир). Таким образом, фазовый детектор очень чувствителен к изменению задержки отражённого сигнала. При изменении задержки всего лишь на половину периода высокочастотных колебаний полярность видеоимпульса на выходе фазового детектора изменяется на противоположную.
При произвольной задержке отражённого импульса сдвиг его фазы по отношению к фазе опорного гетеродина может принимать любое значение в пределах от 0 до2. Амплитуда и полярность импульса на выходе фазового детектора легко определяется графически из векторной диаграммы. На рис.8 приведены векторные диаграммы для случаев =450и=1350.

Амплитуда и полярность импульса определяется как разность длин векторов |U|-|Uоп|. При =450 |U|>|Uоп| - импульс положительной полярности. При =1350 |U|<|Uоп| - импульс отрицательной полярности (рис. 8). Рассмотрим закономерности изменения напряжения на выходе фазового детектора в импульсной РЛС с опорным гетеродином на примерах.