

Zagryadtskiy_elektr_mashiny_3
.pdfДвигатели независимого и параллельного возбуждения. Дви-
гатели нашли применение в станках и других механизмах, требующих широкого регулирования частоты вращения. Схемы их включения приведены на рис. 2.35 (а) и 2.35 (б).
Скоростная характеристика. Скоростная характеристика может быть получена из выражения (2.51). Из него следует, что частота вращения двигателя от тока якоря представляется линейной зависимостью. С увеличением нагрузки двигателя происходит увеличение тока якоря, частота вращения при этом снижается.
Механическая характеристика. Она получается, если в уравнение (2.51) подставить значение тока, выраженное через момент (2.17)
|
|
|
|
n = |
U |
− |
МRa |
= n − |
MRa |
, |
( |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
CeФ CeCмФ2 |
0 |
CеCмФ2 |
|
2.52) |
|||
|
|
|
U |
|
|
|
||||||
где |
n |
= |
− частота вращения идеального холостого хода. Она |
|||||||||
|
||||||||||||
|
0 |
|
Ce Ф |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
имеет место, когда М = 0.
Уравнение (2.52) описывает естественную механическую характеристику, если U =Uн.
Естественная характеристика двигателя является «жесткой», так как при изменении момента частота вращения изменяется незначительно. Если в цепь якоря включить добавочное сопротивление Rд, то
получим ряд искусственных (реостатных) характеристик. Искусственные характеристики являются «мягкими» характеристиками. На рис. 2.37 представлены реостатные характеристики двигателя с независимым возбуждением при отсутствии и введении сопротивления в цепь якоря. Они имеют вид прямых наклонных линий, пересекающихся в одной точке, а именно при М = 0. Эта точка является точкой идеального холостого хода n0 . Если при постоянном моменте на валу
двигателя М = Мн, например, увеличивать сопротивление в цепи яко-
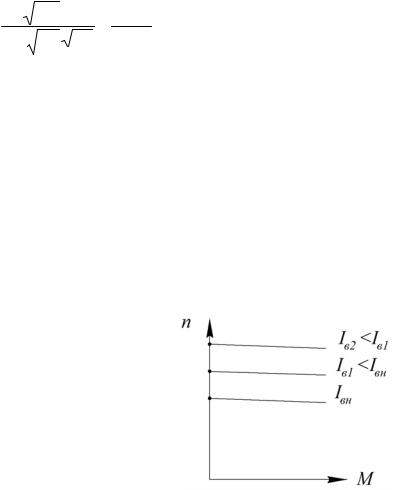
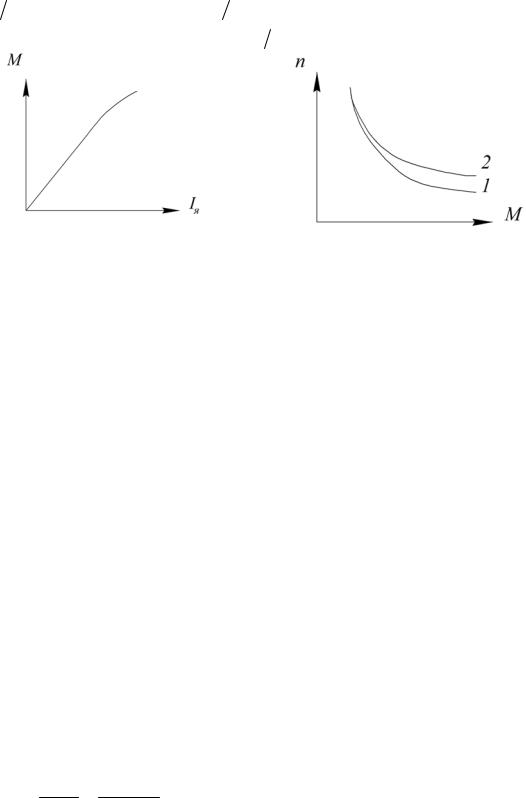
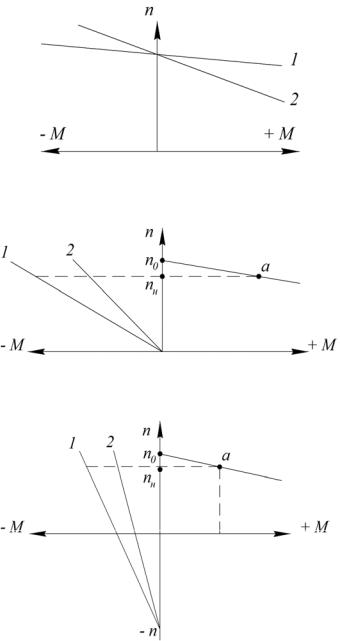
ря, то двигатель будет снижать свою частоту вращения в установившемся режиме. В случае изменения напряжения U , например, его понижения, частота вращения двигателя понизится. Поток Ф двигателя параллельного возбуждения можно только уменьшать, при этом частота вращения двигателя увеличивается. На рис. 2.38 приведены механические характеристики двигателя с параллельным возбуждением при номинальном напряжении и при уменьшении напряжения.
140

Рис. 2.37. Механические реостатные характеристики двигателя с независимым возбуждением
Рис. 2.38. Механические характеристики двигателя параллельного возбуждения при изменении напряжения
На рис. 2.39 даны механические характеристики двигателя при номинальном токе (потоке) возбуждения и при его снижении по сравнению с номинальным током Iвн возбуждения.
Электромагнитный момент двигателя. Этот момент определяет-
ся формулой (2.17)
М = СмФI я.
Моментная характеристика имеет вид прямой линии, слегка изогнутой к оси абсцисс (рис. 2.40), что объясняется влиянием реакции якоря при повышении тока якоря.
Пример 15. По данным примера 14 определить сопротивление добавочного резистора Rд , включаемого последовательно с якорем,
для получения частоты вращения n =1000 мин-1 Величина момента неизменна.
Решение:
Из уравнения (2.50) найдем величину СеФ
|
С Ф = U − I я(Ra + Rдп)= 220 − 28,11 (0,269 + 0,22)= 0,129 |
В мин, |
||||
|
е |
n |
|
|
1600 |
|
где величина тока I я |
берется из решения в предыдущем примере. |
|||||
|
Величина |
добавочного |
сопротивления |
определится |
||
R = U −CeФn |
−(R + R |
|
)= 220 −0,128 1000 −(0,269 + 0,22)= 2,75 Ом. |
|||
д |
I я |
a дп |
28,11 |
|
|
|
|
|
|
|
|
||
Двигатель последовательного возбуждения. Двигатели после-
довательного возбуждения нашли широкое применение на электротранспорте, в грузоподъемных механизмах и машинах, в электроин-
141
струменте. Схема включения двигателя последовательного возбуждения приведена на рис. 2.35 (в).
Механическая характеристика двигателя. В двигателе последо-
вательного возбуждения магнитный поток создается током якоря, поэтому для ненасыщенной машины магнитный поток пропорционален току I я, то есть
|
|
Ф = кфI я., |
|
|
|
( |
||||
где кф − коэффициент пропорциональности. |
2.53) |
|||||||||
|
||||||||||
Момент двигателя (2.17) с учетом (2.53) запишется |
|
|||||||||
|
М =С ФI |
я |
= к |
ф |
С |
м |
I 2. |
( |
||
|
|
м |
|
|
|
я |
2.54) |
|||
|
|
|
|
|
|
|
|
|
|
|
Подставив (2.54) |
в (2.52), получим следующее выражение для |
|||||||||
механической характеристики |
|
|
|
|
|
|
|
|
||
|
n = |
CмU |
− |
Ra . |
( |
|||||
|
См |
кф |
М |
|
Cekф |
2.55) |
||||
Как показывает уравнение (2.55), частота вращения двигателя при |
||||||||||
увеличении момента |
уменьшается |
|
по |
гиперболическому |
закону |
|||||
(рис. 2.41), кривая 1. В случае больших токов якоря магнитная система машины насыщается и частота вращения двигателя убывает медленнее, (см. рис. 2.41, кривая 2).
При М → 0 частота вращения принимает бесконечно большое значение, поэтому двигатель последовательного возбуждения не следует включать под полное напряжение без механической нагрузки на валу. Следует отметить, что уравнение (2.55) является приближенным
и не может быть использовано |
для точных расчетов. Причина этого |
||||||||
заключается в том, что при выводе форму- |
|
||||||||
лы (2.55) использовалась линейная зависи- |
|
||||||||
мость между магнитным потоком и током. |
|
||||||||
Для точных практических расчетов исполь- |
|
||||||||
зуются так называемые универсальные ха- |
|
||||||||
рактеристики, приведенные в табл. 3. |
|
||||||||
|
|
|
|
Таблица 3 |
|
||||
|
|
Универсальные |
|
|
Рис. 2.39. Механические |
||||
|
|
характеристики |
|
|
характеристики двигателя |
||||
|
|
|
|
параллельного возбуждения |
|||||
|
I* |
0,4 |
0,8 |
1 |
1.2 |
|
1.6 |
|
|
|
|
|
при изменении тока |
||||||
|
|
|
|
|
|
|
142 |
возбуждения |
|
|
|
|
|
|
|
|
|
||
ω* |
1.8 |
1.2 |
1 |
0.9 |
0.8 |
М* |
0.3 |
0.7 |
1 |
1.3 |
1.9 |
Они представляют зависимости относительной частоты вращения
ω* =ω ωном и момента M * = М Мном |
от относительного значения тока |
I * = I |
Iном . |
Рис. 2.40. Моментная |
Рис. 2.41. Механические |
|
характеристика двигателя |
||
характеристики двигателя |
||
с параллельным |
||
последовательного |
||
возбуждением |
||
возбуждения |
||
|
Способы регулирования частоты вращения двигателя последовательного возбуждения не отличаются от способов регулирования частоты вращения двигателя параллельного возбуждения. Для понижения частоты вращения включают реостат в цепь якоря, для повышения оборотов шунтируют обмотку возбуждения регулируемым сопротивлением.
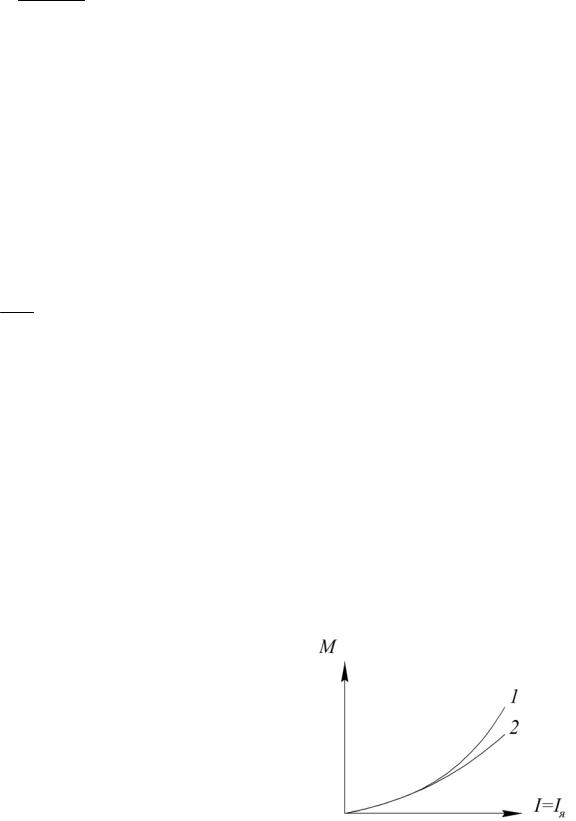
Электромагнитный момент двигателя. Электромагнитный мо-
мент ненасыщенного двигателя определяется, согласно выражению (2.54). Из него следует, что момент пропорционален квадрату тока. Зависимость момента от тока якоря приведена на рис. 2.42, кри-
вая 1. С учетом насыщения она представится кривой 2.
Пример 16. Двигатель с последовательным возбуждением име-
ет следующие данные: Р2 =12 кВт, U = 220B, nн = 675 мин−1, I ян = 68 А. Чему будет равны сила тока в обмотке якоря и частота враще-
ния якоря, если момент на валу машины составляет 0,8Мном ?
Решение:
Номинальная угловая частота вращения якоря
ωном = 2π60nн = 2π60675 = 70,65 рад/ c.
Номинальный момент двигателя
143
Мном = |
Р2 |
= |
12000 |
=169,85Н м. |
|
ωном |
70,65 |
||||
|
|
|
Момент в относительных единицах после уменьшения нагрузки на двигатель
М* = 0,8Мном = 0,8.
Мном
По табл. 3 , содержащей данные по универсальным характеристикам, по моменту М* находим относительные значения тока I* и частоты вращения ω*
I* =0,9, ω* =1.2.
Умножим относительные значения тока и угловой частоты вращения на их номинальные значения.
I = I * I ян = 0,9 68 = 61,2А,
ω = ω* ωном =1,2 70,65 = 84,78 рад/ c.
Частота вращения якоря равна
n = 602πω = 810 мин−1.
При уменьшении нагрузки ток якоря уменьшается, а частота вращения якоря увеличивается.
Двигатель смешанного возбуждения. На рис. 2.35 (г) представ-
лена принципиальная схема включения двигателя постоянного тока смешанного возбуждения. Главной обмоткой обычно является параллельная обмотка возбуждения, вспомогательной обмоткой – последовательная обмотка возбуждения, которая включается согласно с главной обмоткой. В этом случае имеет место увеличение пускового момента.
Механическая и скоростная характеристики двигателя смешанного возбуждения занимают графически промежуточное положение между аналогичными характеристиками двигателей параллельного и последовательного возбуждения.
Двигатель с постоянными магни-
тами. Двигатели с постоянными магнитами мощностью 0,75…18 кВт нашли широкое применение в робототехнике, цифровых управляемых механизмах,
Рис. 2.42. Моментные 144 характеристики двигателя
последовательного возбуждения
электроприводах дисководов и печатающих устройствах и т.д.
Их особенностью является то, что вместо обмоток возбуждения применяются постоянные магниты: магниты типа альнико, керамические или ферритовые, редкоземельные магниты. Наилучшими характеристиками, т.е. высокой остаточной индукцией и коэрцитивной силой, обладают редкоземельные магниты на основе соединений сама- рий-кобальт.
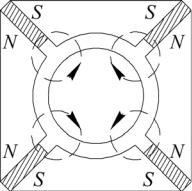
Система возбуждения двигателя постоянного тока с постоянными магнитами зависит от типа постоянного магнита. На рис. 2.43 представлена система возбуждения, выполненная на редкоземельных маг-
нитах, как наиболее предпочтительная.
В двигателях используются три основные конструкции якоря: традиционная с пазами
ибарабанной обмоткой, беспазовый якорь, полый якорь.
Вбеспазовом роторе пазы отсутствуют,
иобмотка якоря укладывается непосредственно на ферромагнитный якорь цилиндрической формы. Она крепится с помощью эпоксидной смолы и стеклоленты. Достоинством двигателя является высокое значение электромагнитного момента, а также снижение его пульсаций. Коэффициент полезного действия двигателя равен 60…70 %.
Рис. 2.43. Система возбуждения двигателя, выполненная из редкоземельных магнитов
В двигателе с полым якорем для того, чтобы получить наименьший момент инерции, необходимо заменить тяжелый ферромагнитный якорь на более легкий, выполненный в виде полого стакана. Конструкция двигателя содержит внешний статор из постоянного магнита и внутренний ферромагнитный неподвижный статор. Вращающимися частями двигателя является размещенная между наружным и внутренним статорами на наружной поверхности полого стакана обмотка якоря и коллектор. Вариантом двигателя с полым ротором является машина, у которой на полом якоре из изоляционного материала размещается печатная обмотка. Двигатель с полым якорем имеет высокий КПД в большом диапазоне частот вращения.
2.11. Способы электромагнитного торможения
145
Двигатель постоянного тока может работать также в генераторном и тормозном режимах. Эти режимы служат для электрического торможения.
Генераторное (рекуперативное) торможение. Этот вид тормо-
жения имеет место для двигателей параллельного и смешанного возбуждения, когда частота вращения двигателя превышает частоту вращения идеального холостого хода (например, электротранспорт движется под уклон). Тогда ЭДС Е = СеnФ становится больше при-
ложенного к двигателю напряжения, двигатель начинает работать генератором. Ток I я = (E −U ) Ra изменяет свое направление и потечет от
Ra изменяет свое направление и потечет от
двигателя в источник питания (сеть). При этом момент двигателя также изменяет свое направление на обратное направление и становится тормозным. Электрическая машина начинает тормозиться. На рис. 2.44 приведены тормозные характеристики 1 и 2 двигателя постоянного тока в режиме генераторного торможения при отсутствии и включении сопротивления в цепи ротора.
Генераторное торможение двигателя последовательного возбуждения осуществляется путем перевода его на параллельное возбуждение.
Динамическое торможение. При этом виде торможения двигатель независимого, параллельного и смешанного возбуждения, вращающийся под действием момента М , отключается от сети, и его якорь подключается к гасящему резистору Rг . Двигатель, в силу
инерции якоря, продолжает вращаться в том же направлении, однако он переходит в генераторный режим с отдачей энергии в резистор. Ток якоря I я = −E (Ra + Rг ) , т.е. он меняет свое направление на проти-
(Ra + Rг ) , т.е. он меняет свое направление на проти-
воположное. Меняет свое направление и момент двигателя на противоположное. Двигатель начинает тормозиться, его тормозные характеристики 1 и 2 при отсутствии и включении гасящего сопротивления приведены на рис. 2.45.
146
Торможение противо-
включением. Этот вид торможения осуществляется изменением полярности напряжения якоря при неизменной полярности обмотки возбуждения. Торможение противовключением позволяет очень быстро остановить двигатель. Объясняется это тем, что в момент изменения полярности напряжения напряжение и ЭДС складываются, ток в якоре меняет свое направление на противоположное. Величина тока при этом может достигнуть значительных величин
I я = −(U + E) Ra .
Ra .
Для ограничения тока в допустимых пределах в якорную цепь необходимо включить добавочное сопротивление. При достижении двигателем нулевой частоты вращения его необходимо отключить от источника напряжения, в противном случае двигатель будет разворачи-
ваться в другую сторону. На рис. 2.46 показаны тормозные характеристики 1 и 2 при торможении противовключением при отсутствии и включении в цепь ротора гасящего сопротивления.
2.12.Изменение направления вращения двигателей постоянного тока
Изменение направления (реверсирование) вращения двигателя постоянного тока связано с изменением направления действия электромагнитного момента двигателя.
147
Как следует из формулы (2.17) для электромагнитного момента, его можно изменять либо путем изменения направления тока якоря при неизменном направлении магнитного потока, либо изменением направления магнитного потока (направление тока в обмотке возбуждения) при неизменном направлении тока якоря. Одновременное изменение направления тока в якоре и направления магнитного потока не приводит к реверсированию двигателя.
Изменение направления тока в якоре можно получить путем смены полярности приложенного напряжения к якорю, а изменение направления потока − изменением направления тока возбуждения.
2.13.Универсальные коллекторные двигатели последовательного возбуждения
Универсальные коллекторные двигатели являются, в сущности, коллекторными машинами постоянного тока, которые могут работать как на постоянном, так и на переменном токе. Они нашли широкое применение в электроинструменте, в бытовой технике из-за малых размеров, малого веса, легкости регулирования частоты вращения. Такой двигатель, независимо от полярности приложенного переменного напряжения, вращается в одну сторону.
Конструктивно универсальный двигатель устроен как двигатель постоянного тока последовательного возбуждения. Отличие заключается лишь в том, что магнитная система, включающая сердечники статора и ротора, выполнена полностью шихтованной. Указанное
|
обстоятельство вызвано тем, что на |
|
переменном токе сердечник статора |
|
пронизывается переменным магнит- |
|
ным потоком и в нем возникают |
|
электрические потери. |
|
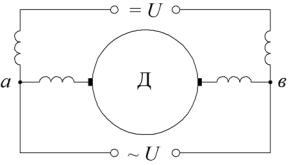
Схема включения универсально- |
|
го двигателя приведена на рис. 2.47. |
Рис. 2.47. Схема универсального |
Из нее следует, что обмотка секцио- |
двигателя |
нируется и делится на две части, ко- |
|
торые подключаются к якорю. Обе |
части соединяются последовательно, и к ним подводится постоянное напряжение.
От обеих частей делаются выводы а и в, к которым присоединяется источник переменного напряжения. При подведении перемен-
148

ного напряжения, двигатель продолжает вращаться в ту же сторону, что и при постоянном напряжении. Происходит это потому, что магнитный поток и ток изменяют свой знак одновременно, следовательно, электромагнитный момент, согласно (2.17), остается однонаправленным.
Определим характер момента двигателя при питании его переменным синусоидальным напряжением.
Мгновенное значение тока якоря двигателя
iя = 2I я sin ωt. |
( |
|
2.56) |
Величина магнитного потока двигателя
ф =Фm sin(ωt − γ), ( 2.57)
где γ − угол сдвига потока относительно тока.
Подставляя (2.56) и (2.57) в (2.17), получим мгновенное значение
магнитного потока |
|
|
М =0,5Cм 2IяФm cosγ−0,5Cм 2IяФm cos (2ωt −γ)= Мпост +М, |
||
где Мпост = 0,5См |
2I яФm cos γ − постоянный момент; |
( |
|
2I яФm cos(2ωt − γ) − переменный момент. |
2.58) |
Мпер = −0,5Cм |
( |
|
|
|
2.59) |
Угол γ весьма небольшой, и на протяжении этого угла момент имеет отрицательное значение, но его значение невелико.
На переменном токе для двигателя можно записать уравнение напряжения
U& = −E& + I&я∑R + jI&я∑X , ( 2.60)
где ∑R и ∑X − сумма активных и индуктивных сопротивлений в цепи якоря.
Знак «–» у ЭДС Е вызван тем обстоятельством, что в двигателе ЭДС направлена противоположно напряжению.
Универсальный двигатель имеет преимущество перед коллекторным двигателем постоянного тока. Так, его величина пускового тока меньше величины пускового тока двигателя постоянного тока. Универсальный двигатель, по сравнению с асинхронным двигателем, обладает плавностью регулирования частоты вращения в очень широком диапазоне, большим пусковым моментом, возможностью получения частоты вращения гораздо большей, чем при частоте сети
149