

Задача №5
ДОСЛІДЖЕННЯ ПЕРЕХІДНИХ ПРОЦЕСІВ В ТРАНСПОРТНІЙ СИСТЕМІ
Завдання. На основі рівняння динаміки, що описує залежність між просторовою швидкістю транспортного потоку та керуючим впливом АСКДР нижнього рівня в перехідному режимі (рівняння беремо з розв’язку задачі №4), розробити динамічну модель автоматичної системи стабілізації швидкості транспортного потоку у вигляді системи різницевих рівнянь. Реалізувати модель в математичному пакеті MathCad.
За допомогою динамічної моделі автоматичної системи стабілізації швидкості транспортного потоку визначити перерегулювання швидкості транспортного потоку для різних значень затримки реалізації керуючого впливу системи (діапазон зміни затримки взяти від 0 до 40 секунд із кроком 5 секунд).
Побудувати графічну залежність перерегулювання швидкості транспортного потоку від затримки реалізації керуючого впливу системи та зробити висновки.
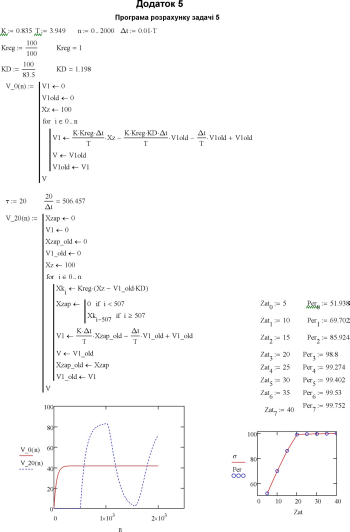
Розв’язок. Програма розрахунку в додатку 5.
Дослідження в пакеті MathCad перехідного процесу на виході автоматичної системи стабілізації швидкості транспортного потоку
Параметри рівняння динаміки, що описує процес зміни у часі середньої просторової швидкості транспортного потоку (об'єкт керування):
 ,
,
 ,
, ,
,
Коефіцієнт підсилення АСКДР нижнього рівня :
 ,
,

За
формулою

розрахуємо коефіцієнт підсилення датчика швидкості транспортного потоку:
 ,
,

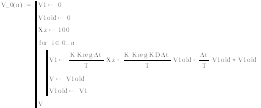
За допомогою системи рівнянь
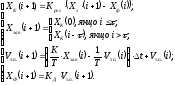
проведемо моделювання АСКДР нижнього рівня з метою отримання перехідного процесу на виході системи для нульової затримки реалізації керуючого сигналу від АСКДР (нульового транспортного зап ізнювання ).
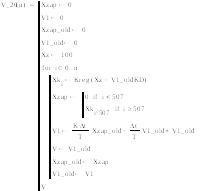
За допомогою системи рівнянь
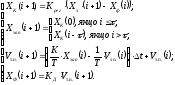
проведемо моделювання АСКДР нижнього рівня з метою отримання перехідного процесу на виході системи для затримки реалізації керуючого сигналу від АСКДР, що дорівнює 20 с.
Час затримкир еалізації керуючого сигналу:
 ,
,

Як видно із рис.5.1, за умови нульового транспортного запізнювання перерегулювання керованої величини на виході системи відсутнє – середня просторова швидкість транспортного потоку змінюється у часі за експоненціальним законом, що є бажаним для технічних систем. При затримці реалізації керуючого сигналу від АСКДР нижнього рівня на 20 с спостерігається значне погіршення перехідного процесу – з’являється перерегулювання швидкості транспортного потоку та істотно збільшується коливання керованої величини у часі при її виході на нове задане значення.
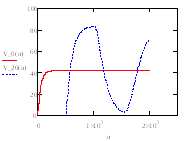
Рис.5.1. Перехідний процес на виході АСКДР нижнього рівня за умови нульової затримки реалізації керуючого сигналу (суцільна лінія) та затримки, що дорівнює 20 с (пунктирна лінія)
Для різних значень часу затримки реалізації керуючого сигналу від АСКДР нижнього рівня визначимо відносний показник перерегулювання швидкості транспортного потоку, який характеризує коливальність перехідного процесу на виході системи:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
















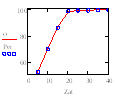
Рис.5.2. Залежність перерегулювання швидкості транспортного потоку від часу транспортного запізнювання
Із рис.5.2 можна зробити наступні висновки:
- на 5 с. запізнювання реалізації керуючого сигналу від АСКДР нижнього рівня викликає перерегулювання швидкості транспортного потоку;
- до 20 с. запізнювання реалізації керуючого сигналу спостерігається практично лінійна залежність перерегулювання швидкості транспортного потоку від часу транспортного запізнювання. Далі відбувається поступова стабілізація перерегулювання швидкості транспортного потоку на рівні 99,9%.
ДОДАТКИ



Література
1. Основы теории транспортных систем / Учебное пособие П. Ф. Горбачев, И. А. Дмитриев. – Харьков : Изд-во ХНАДУ, 2002. – 202 с.
2. Очков В. Ф. Mathcad 14 для студентов и инженеров. – С.-Пб.:БХВ –Петербург, 2007. – 368 с.
3. Шаруда В.Г., Ткачов В.В., Фількін М.П. Методи аналізу і синтезу систем автоматичного керування : Навч. посіб. – Д., Нац. гірнич. ун-т, 2008. – 543 с.
4. Татт У. Теория графов : Пер. с англ. – М. : Мир, 1988. – 424 с.