

МЕХАНИКА
.pdf21
Закон сохранения импульса.
До взаимодействия |
p01 |
m1v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
01 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p02 |
m2v02 |
|
|
|
|
|
|
|
|
|
|
|
|
||
После взаимодействия |
p1 |
m1v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p2 |
m2v2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F1 t m1v1 m1v |
01 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F2 t m2v2 m2v02 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Согласно 3 з-ну Ньютона: F1 F2 , следовательно: |
m |
1v |
1 |
m1v01 |
(m2v |
2 |
m2v |
02 ) |
|
|
||||||
p1 p2 ... const |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
m |
1v01 |
m |
2v02 |
m |
1v1 |
m |
2v2 |
|
|
|
|||
|
|
|
|
|
|
|||||||||||
Геометрическая (векторная) сумма импульсов взаимодействующих тел, составляющих замкнутую систему, остается неизменной.
|
Замкнутой называется система тел, взаимодействующих только друг с другом и не |
|
|
|
|
|
|||||||
|
взаимодействующих с другими телами. Можно пользоваться и для незамкнутых систем, если сумма |
|
|
|
|
|
|||||||
|
внешних сил, действующих на тела системы, равна нулю, или процесс происходит очень быстро, |
|
|
|
|
|
|||||||
|
когда внешними воздействиями можно пренебречь (взрыв, атомные процессы). |
|
|
|
|
|
|||||||
|
|
В общем виде: т.к. система замкнутая, то Fi 0, следовательно |
|
|
|
|
|
||||||
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
pi |
|
|
|
|
|
|
pi |
const |
|
|
|
|
|
|
pi 0 |
(pi p |
|
pi const |
|
|
|
||||
|
0 |
0i ) 0 |
|
i |
|
|
|
||||||
|
|
|
|
|
|
||||||||
|
i |
t |
i |
i |
|
i |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||||
|
Примеры применения закона сохранения импульса: |
|
|
|
|
|
|
|
|
||||
|
1. Любые столкновения тел (биллиардных шаров, автомобилей, элементарных частиц и т.д.); |
|
|
|
|
|
|||||||
|
2. Движение воздушного шарика при выходе из него воздуха; |
|
|
|
|
|
|
|
|||||
|
3. Разрывы тел, выстрелы и т.д. |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
Механическая работа (А) |
|
|
|
|
|
|
|
||
|
Физическая величина, характеризующая результат действия силы и численно равная |
|
|
|
|
|
|
||||||
|
скалярному произведению вектора силы и вектора перемещения, совершенного под действием |
|
|
|
|
|
|
||||||
|
|
|
|
|
этой силы. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A=Fscosα |
|
|
|
|
A=Fscosα |
|
|
|
|
|
|
|
Работа не совершается, если: |
|
|
|
|
|
|
|
||
|
1. Сила действует, а тело не перемещается. |
|
|
|
|
|
|
|
|
||||
|
|
Например: мы действуем с силой на шкаф, но не можем сдвинуть. |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
||||||
|
2. Тело перемещается, а сила равна нулю или все силы скомпенсированы. |
|
|
|
|
|
|
||||||
|
Например: при движении по инерции работа не совершается. |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
||||||
|
3. Угол между векторами силы и перемещения (мгновенной скорости) равен 900 (cos =0). |
|
|
|
|
|
|
||||||
|
Например: центростремительная сила работу не совершает. |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|

22
|
Если вектора силы и перемещения сонаправлены (α=00, cos0=1), то A=Fs |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если вектора силы и перемещения направлены противоположно |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( =1800, cos1800 = -1), то A= -Fs (например, работа силы сопротивления, трения). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если угол между векторами силы и перемещения 00 < α < 1800, то работа положительна. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если угол между векторами силы и перемещения 00 < α < 1800, то работа положительна. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если на тело действует несколько сил, то полная работа (работа всех сил) равна работе |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
результирующей силы. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если сила меняется с расстоянием (координатой), то необходимо разбить все движение на такие |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
малые участки, на которых силу можно считать неизменной, сосчитать работы на каждом |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
элементарном участке пути, и сложить все элементарные работы. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Графическое представление работы. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рассмотрим движение тела под действием постоянной силы вдоль прямой Ох. График зависимости |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
силы от координаты изображен на рисунке. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Площадь заштрихованного прямоугольника на рисунке численно равна работе силы F при |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
перемещении из точки х1 в точку х2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если тело движется не по прямой, то можно разбить все движение на бесконечно малые участки, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
которые можно считать прямолинейными, и просуммировать работы. Таким образом: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
работа численно равна площади фигуры под графиком зависимости силы от координаты F(x). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Единицы работы. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В международной системе единиц (СИ): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
[А] = Дж = Н • м |
|
1Дж = 1Н • 1м |
|
||||||||||
|
Механическая работа равна одному джоулю, если под действием силы в 1 Н оно перемещается |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
на 1 м в направлении действия этой силы. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Мощность |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Мощность - физическая величина, характеризующая скорость совершения работы и численно |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
равная отношению работы к интервалу времени, за который эта работа совершена. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Мощность показывает, какая работа совершается за единицу времени. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Единицы мощности |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В международной системе единиц (СИ): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Мощность равна одному ватту, если за 1 с совершается работа 1 Дж. |
1 л.с. (лошадиная сила) |
|
|||||||||||
|
|
|
|
735 Вт |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Энергия. Виды механической энергии. Работа и энергия. |
|
|
|
|
|
|
|
|
|
|
|
|
|
Энергия - физическая величина, характеризующая состояние тела или системы тел по их |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
движению и взаимодействию. В механике энергия тела или системы тел определяется взаимным |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
положением тел или системы тел и их скоростями. При изменении состояния тела (изменении |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
энергии) совершается механическая работа. Т.о. изменение энергии при переходе системы из |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
одного состояния в другое равно работе внешних сил. Механическая работа - мера изменения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
энергии тела. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В механике выделяют два вида энергии: |
|
|
|
|
|
|
|
|
|
|
|
|
|
23
кинетическую энергию и потенциальную энергию.
Кинетическая энергия.
Кинетическая энергия - энергия движущегося тела.(От греческого слова kinema - движение). По определению кинетическая энергия покоящегося в данной системе отсчета тела обращается в ноль.
Пусть тело движется под действием постоянной силы 
 в направлении действия силы.
в направлении действия силы.
Тогда: |
|
|
|
|
. |
|
|
|
|
|
|
|||||||
Т.к. |
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|||||||||||||||
Т.к. |
движение равноускоренное, то: |
. |
||||||||||||||||
Следовательно: |
. |
[Ek]=Дж.
- кинетической энергией называется
величина, равная половине произведения массы тела на квадрат его скорости.
Кинетическая энергия - величина относительная, зависящая от выбора СО, т.к. скорость тела зависит от выбора СО.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т.о. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
- эта формула выражает теорему о кинетической энергии: изменение кинетической энергии тела |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
(материальной точки)за некоторый промежуток времени равно работе, совершенной силой, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
действующей на тело, за этот же промежуток времени |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
Эта теорема справедлива для любого движения и для сил любой природы. Если тело разгоняется из |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
состояния покоя, то Ek1=0. Тогда |
A = Ek2. Следовательно, кинетическая энергия численно |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
равна работе, которую необходимо совершить, чтобы разогнать тело из состояния покоя до |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
данной скорости. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Вывод: Работа силы равна изменению кинетической энергии тела, т.е. A = Ek. Причем, A>0, |
|
|
|
|
|
|
|
A = Ek |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
если Ek увеличивается, и А<0, если Ek<0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Потенциальная энергия. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Потенциальная энергия - энергия взаимодействия тел или частей тела. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
Потенциальная энергия (от |
|
латинского potentia - возможность) определяется |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
взаимным расположением тел или частей тела, т.е. расстояниями между ними. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
Потенциальная энергия тела, поднятого над Землей. Работа силы тяжести. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
Пусть тело свободно падает с высоты h1 |
над уровнем Земли на уровень h2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
h1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
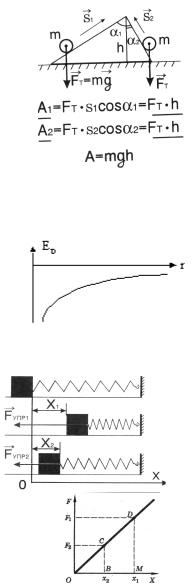
Тогда: A Fs cos mg(h1 |
h2 ) mgh |
1 mgh2 (mgh2 |
mgh1 ) |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
При падении сила тяжести совершает положительную работу, при движении тела вверх - отрицательную.
Величину Eз = mgh называют потенциальной энергией взаимодействия тела и Земли.
|
|
|
|
|
s |
|
|
|
h2 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т.о. A = - (Ep2 - Ep1) = - Ep Работа сила тяжести равна изменению потенциальной |
|
Eз = mgh |
||||
энергии, взятому с противоположным знаком. |
Т.е., если потенциальная энергия |
|
||||
|
|
|
|
|
||
увеличивается (тело поднимается), то сила тяжести совершает отрицательную работу |
A = - (Ep2 |
- Ep1) = - Ep |
||||
и наоборот. |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
24 |
|
|
|
|
|
|
|
|
|
Т.к. потенциальная энергия определяется координатой, то величина потенциальной |
|
|
|
|
||||||||||||||||||||||||||
энергии определяется выбором системы координат (выбором нулевого уровня). Т.е. |
|
|
|
|
||||||||||||||||||||||||||
она определяется с точностью до постоянной величины. |
В данной задаче удобно за |
|
|
|
|
|||||||||||||||||||||||||
точку отсчета выбирать уровень Земли. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Если тело движется под углом к направлению вектора силы тяжести, то, как |
|
|
|
|
||||||||||||||||||||||||||
видно из рисунка, работа силы тяжести |
независимо от траектории определяется |
|
|
|
|
|||||||||||||||||||||||||
изменением положения тела (на рис. - высотой наклонной плоскости h). |
|
|
|
|
||||||||||||||||||||||||||
Если тело движется по произвольной траектории, то ее можно представить в |
|
|
|
|
||||||||||||||||||||||||||
виде суммы горизонтальных участков, на которых работа силы тяжести равна нулю, и |
|
|
|
|
||||||||||||||||||||||||||
вертикальных, на которых суммарная работа будет равна А=mgh. |
|
|
|
|
|
|
|
|
||||||||||||||||||||||
Работа силы тяжести не зависит от формы траектории и определяется |
|
|
|
|
||||||||||||||||||||||||||
только начальным и конечным положением тела. |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
На замкнутой траектории работа силы тяжести равна нулю, т.к. |
|
|
|
|
||||||||||||||||||||||||||
потенциальная энергия не меняется. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Потенциальная энергия тел, взаимодействующих посредством гравитационных |
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
сил. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Ep G |
Mm |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где r- расстояние между взаимодействующими телами. |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
Знак "-" говорит о том, что это энергия притягивающихся тел. |
|
|
|
|
||||||||||||||||||||||||||
При сближении тел потенциальная энергия увеличивается по модулю. |
|
|
|
|
||||||||||||||||||||||||||
Работа по сближению двух астрономических объектов: |
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
A GMm( |
|
|
|
|
). |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
r |
r |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
Потенциальная энергия упруго деформированного тела. Работа силы упругости. |
|
|
|
|
||||||||||||||||||||||||||
Для вывода формулы используем, что работа численной равна площади под графиком |
|
|
|
|
||||||||||||||||||||||||||
зависимости силы от координаты. При малых упругих деформациях сила упругости |
|
|
|
|
||||||||||||||||||||||||||
прямо пропорциональна абсолютной деформации (з-н Гука) - см. рис. |
|
|
|
|
||||||||||||||||||||||||||
Тогда работа при изменении деформации от х1 до х2 равна: A |
F1 F2 |
(x1 x2 ). |
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Учитывая з-н Гука, получим: |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
x |
1 |
x |
2 |
|
|
|
x |
2 |
x2 |
kx2 |
kx2 |
|
|
|
|
||||||||
|
|
A k |
|
|
|
|
(x1 x2 ) k |
|
1 |
|
|
2 |
|
1 |
|
2 |
|
|
|
|
|
|
||||||||
|
|
|
|
|
2 |
|
|
|
|
2 |
|
2 |
2 |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
||||||||||||||||||||||||||
Т.о., если принять за потенциальную энергию упруго деформированного тела |
|
|
|
|
||||||||||||||||||||||||||
величину Ep |
|
kx2 |
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ep |
|
kx2 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
где k - коэффициент жесткости, а х - абсолютная деформация тела, то можно сделать |
|
|
|
|
||||||||||||||||||||||||||
вывод , что A Ep1 |
Ep2 |
Ep , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A Ep1 Ep2 Ep |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
т.е. работа силы при деформации тела равна изменению потенциальной энергии |
|
|
|
|
||||||||||||||||||||||||||
этого тела, взятой с обратным знаком. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Работа силы упругости зависит только от координат (начальной и конечной |
|
|
|
|
||||||||||||||||||||||||||
деформаций) тела и, следовательно, не зависит от траектории. Работа по замкнутой |
|
|
|
|
||||||||||||||||||||||||||
траектории равна нулю. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Консервативные силы. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Консервативными (сохраняющими) наз. силы, работа которых не зависит от |
|
|
|
|
||||||||||||||||||||||||||
траектории и по замкнутой траектории равна нулю (эти силы не зависят от |
|
|
|
|
||||||||||||||||||||||||||
скоростей). Примеры: гравитационные, упругие. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
25
Диссипативные силы Диссипативными (рассеивающими) наз. силы, работа которых зависит от траектории
и по замкнутой траектории не равна нулю (такие силы зависят от скорости). Пример: сила трения.
Закон сохранения механической энергии.
Сумма кинетической и потенциальной энергий системы тел называется полной |
E = Ep + Ek |
||||||
механической энергией системы. |
|||||||
|
|||||||
Учитывая, что при совершении работы A = Ek и, одновременно, A = - Ep, получим: |
|
||||||
Ek = - Ep или |
|
|
|
|
Ek = - Ep |
||
(Ek + Ep)=0 - изменение суммы кинетической и потенциальной энергий (т.е. изменение |
|||||||
|
|||||||
полной механической энергии) системы равно нулю. |
|
||||||
Значит, полная энергия системы остается постоянной: |
|
||||||
E = Ep + Ek = const. В замкнутой системе, в которой действуют только |
|
||||||
консервативные силы, механическая энергия сохраняется. (Или: полная механическая |
E = Ep + Ek = const |
||||||
энергия системы тел, взаимодействующих силами упругости и гравитации, остается |
|
||||||
неизменной при любых взаимодействиях внутри этой системы). |
|
||||||
Например, для тела, движущегося под действием силы тяжести (падение; тело, |
|
||||||
брошенное под углом к горизонту, вертикально вверх или движущееся по наклонной |
|
||||||
|
mv2 |
|
mv2 |
|
|||
плоскости без трения): mgh |
|
1 |
mgh |
2 |
. |
|
|
|
2 |
2 |
|
||||
1 |
|
2 |
|
|
|||
|
|
|
Работа силы трения и механическая энергия. |
|
|||
Если в системе действуют силы трения (сопротивления), которые не являются |
|
||||||
консервативными, то энергия не сохраняется. При этом E1 - E2 = Aтр. Т.е. изменение полной |
|
||||||
механической энергии системы тел равно работе сил трения (сопротивления) в этой |
E1 - E2 = Aтр |
||||||
системе. Энергия изменяется, |
расходуется, |
поэтому такие силы наз. диссипативными |
|
||||
(диссипация - рассеяние). |
|
|
|
|
|
||
Т.о. механическая энергия может превращаться в другие виды энергии, напр., во внутреннюю (деформация |
|||||||
взаимодействующих тел, нагревание). |
|
|
|
||||
Столкновения тел.
З-н сохранения и превращения механической энергии применяется, например, при изучении столкновений тел. При этом он выполняется в системе с з-ном сохранения импульса. Если движение происходит так, что потенциальная энергия системы остается неизменной, то может сохраняться кинетическая энергия.
Удар, при котором сохраняется механическая энергия системы, наз. абсолютно
упругим ударом.
|
|
|
m |
2 |
|
|
m 2 |
m 2 |
|
m 2 |
|
||||||
|
|
|
1 01 |
|
|
2 2 |
|
|
1 1 |
|
2 2 |
|
|||||
|
|
|
|
|
2 |
|
2 |
2 |
|
||||||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
Удар, при котором тела движутся после столкновения вместе, с одинаковой |
m1 |
01 |
m2 02 |
(m1 m2 ) |
|
||||||||||||
скоростью, наз. абсолютно неупругим ударом (при этом механическая энергия не |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сохраняется). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m 2 |
|
m 2 |
(m1 m2) 2 |
|
|
||||||||||
|
|
|
|
|
|
||||||||||||
|
|
|
1 01 |
|
2 |
02 |
|
|
|
|
Q |
|
|||||
|
|
|
|
|
|
|
2 |
|
|
||||||||
|
|
2 |
|
|
2 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Удар, при котором тела до соударения движутся по прямой, проходящей через их |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
центр масс, наз. центральным ударом. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|