

МЕХАНИКА
.pdf11
t=0 (начало движения) и tпол |
|
2v0y |
|
|
2v |
0 |
cos |
|
|
|
|
|
|
|||||||
g |
|
|
|
|
|
g |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|||||||||||||||||||
Зная время полета, найдем максимальное расстояние, которое пролетит тело: |
Дальность полета: |
|||||||||||||||||||
|
2v0xv0y |
|
2v |
0 |
cos v |
0 |
sin |
v2 sin 2 |
|
|
2 |
|
||||||||
L vxtпол |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
L |
v |
0 sin2 |
|
||
g |
|
|
|
|
g |
|
|
|
|
g |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
g |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Из этой формулы следует, что:
-максимальная дальность полета будет наблюдаться при бросании тела (при стрельбе, например) под углом 450;
-на одно и то же расстояние можно бросить тело (с одинаковой начальной скоростью) двумя способами – т.н. навесная и настильная баллистические траектории.
Используя то, что парабола – это симметричная кривая, |
найдем максимальную |
Время подъема: |
|||||||||||||||||||||
высоту, которой может достичь тело. Время, за которое тело долетит до середины, |
t |
v0 |
cos |
|
|||||||||||||||||||
|
v0y |
|
v |
|
cos |
|
|
|
|
|
|
|
|
|
|
||||||||
равно: t |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
g |
||||||||
g |
|
|
g |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Тогда: hmax v0yt |
|
gt 2 |
|
v02 sin2 |
|
|
Максимальная высота: |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
v2 sin2 |
||||||||||
2 |
|
|
2g |
|
|
hmax |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2g |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|||||||||||||||||
Скорость тела в любой момент времени направлена по касательной к траектории |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
движения (параболе) и равна v |
|
vx2 vy2 v02 cos2 |
(v0 sin gt)2 |
|
|
|
|
|
|
||||||||||||||
Динамика. |
|
|
В кинематике непосредственно решается основная задача механики: по известным |
|
|
начальным условиям и характеру движения определяется положение тела в любой момент |
|
|
времени. Кинематика не отвечает на вопрос: почему движение тела имеет тот или иной |
|
|
характер, в чем причина изменения характера движения. |
|
|
Основная задача динамики: определение характера движения (ускорения) по заданным |
|
|
взаимодействиям. Обратная задача: зная характер движения, определить характер |
|
|
взаимодействия. |
|
|
Основное утверждение механики: изменение скорости тела (ускорение) всегда |
|
|
вызывается воздействием на данное тело каких-либо других тел. |
|
|
Эти задачи решаются |
||
Свободным телом называется тело, на которые не действуют другие тела или поля. При |
||
системой законов |
||
решении некоторых задач тело можно считать свободным, если внешние воздействия имеются, |
||
Ньютона (опубликованы в |
||
но они уравновешены. |
||
1687 г. в |
||
При изучении поступательного движения твердого тела рассматривается движение |
||
центра инерции (центра масс) тела. |
книге "Математические |
|
начала натуральной |
||
Т.к. движение относительно, то механические задачи можно решить только в |
||
определенных системах отсчета (СО). Поэтому при формулировании законов динамики |
философии"). Законы |
|
необходимо: |
Ньютона – это |
|
обобщение |
||
1. Задать критерий выбора СО; |
||
многочисленных |
||
2. Решить основную задачу; |
||
3. Установить связь между взаимодействующими телами. |
наблюдений, особенно |
|
Г. Галилея. |
||
|
12
Инерция.
Аристотель: для движения необходимо воздействие одних тел на другие.
Галилей: взаимодействие необходимо только для изменения характера движения. При отсутствии воздействий тело будет двигаться прямолинейно и равномерно бесконечно долго. В реальной жизни мы действуем на тело (прикладываем силу) для преодоления трения (сопротивления).
Инерция – явление сохранения скорости телом при отсутствии или компенсации внешних воздействий:
т.е., если F const, то v const - тело движется прямолинейно и равномерно или покоится.
|
|
|
|
|
|
|
|
|
|
|
Масса. |
|
|
|
|
|
|
|
|
|
|
|
||||
Инертность - свойство различных материальных объектов приобретать разные ускорения при |
|
|
|
|
|
|||||||||||||||||||||
одинаковых внешних воздействиях со стороны других тел. Присуща разным телам в разной степени. |
|
|
|
|
|
|||||||||||||||||||||
Свойство инертности показывает, что для изменения скорости тела необходимо время (расстояние). Чем |
|
|
|
|
|
|||||||||||||||||||||
труднее изменить скорость тела, тем оно инертнее. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Масса – скалярная величина, являющаяся мерой инертности тела при поступательном движении. (При |
|
|
|
|
|
|||||||||||||||||||||
вращательном движении - момент инерции). Чем инертнее тело, тем больше его масса. Определенная |
|
|
|
|
|
|||||||||||||||||||||
таким образом масса называется инертной (в отличие от гравитационной массы, определяющейся из |
|
|
|
|
|
|||||||||||||||||||||
закона Всемирного тяготения). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Опыт. |
Как бы ни происходило взаимодействие тел, |
выполняется равенство: |
a1 |
const . |
При этом |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||
направления векторов ускорений противоположны! |
|
|
|
|
|
a2 |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Вывод: |
|
a1 |
|
m2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
a2 |
m1 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
- ускорение обратно пропорционально массе тела a |
|
(при заданном взаимодействии). |
|
|
|
|
|
|
||||||||||||||||||
m |
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Единица масса в СИ: килограмм (кг) – основная (эталонная) единица. |
|
|
|
|
|
|
|
|
||||||||||||||||||
Эталон - платиново-ирридиевый цилиндр. Хранится в г. Севр (Франция). |
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
Массу тела можно определить: |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
1. По |
взаимодействию с эталоном. m |
T |
|
|
aЭТ |
|
|
m |
ЭТ |
, где аэт – ускорение эталона |
при его |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||
aT |
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
взаимодействии с телом. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
2. По плотности: m V . Плотность – |
скалярная физическая величина, |
численно равная массе |
|
m V |
||||||||||||||||||||||
единице объема вещества. Характеристика данного вещества (табличная величина). Единицы плотности |
|
г |
|
кг |
|
|||||||||||||||||||||
в СИ. [ ] |
êã |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1000 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
см3 |
м3 |
||||||||||
|
|
|
ì 3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
3. Практически массу определяют на весах (взвешиванием). |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
||
Свойство массы – аддитивность, т.е. масса тела равна сумме масс его частей. |
|
|
|
|
m mi |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i 1 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
СИЛА.
Сила – векторная физическая величина, являющаяся мерой взаимодействия тел. Обозначение: F.
Существует 4 основных типа взаимодействия: гравитационное, электромагнитное, сильное, слабое. Все взаимодействия являются проявлениями этих основных типов.
Примеры сил: сила тяжести, сила упругости, вес тела, сила трения, выталкивающая (архимедова) сила, подъемная сила.
Сила характеризуется:

13
|
|
|
1. Величиной (модулем); |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
2. Направлением; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
3. Точкой приложения. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Из опыта по взаимодействию следует: |
|
a1 |
|
|
m2 |
|
или |
|
a |
1 |
m |
1 |
|
|
|
a |
2 |
m |
2 |
|
. Величина |
|
a m |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
a2 |
|
m1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
a2m2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
характеризует действие второго тела на первое, |
а величина |
|
|
- |
характеризует действие первого |
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
F ma |
|||||||||||||||||||||||||||||||||||||
тела на второе. Т.к. взаимодействие одно и то же, то величину, равную произведению массы тела на |
|
|
|||||||||||||||||||||||||||||||||||||||
ускорение, полученное в данном взаимодействии, можно принять за меру взаимодействия: F ma. |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
Внимание: вектора ускорения и силы всегда сонаправлены! |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Т.к. сила – векторная величина, то силы складываются векторно (правила параллелограмма и |
|
|
|
|
F F1 |
F2 F3 ... |
|
||||||||||||||||||||||||||||||||||
треугольника). Складывать можно только силы, приложенные к одному телу. Сила, равная |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
векторной сумме всех действующих на тело сил, называется равнодействующей: |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
F F1 |
F2 F3 |
... |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
м |
|
|
Единицы силы: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
СИ: F кг |
Н Сила равна одному ньютону, если тело массой 1 кг приобретает ускорение |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
с2 |
|
1м/с2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Измерение силы: силы измеряются динамометром по сравнению величины измеряемой силы с силой |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
упругости пружины. Используется линейная зависимость между величиной силы упругости и |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
удлинением пружины. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Для правильного измерения силы необходимо, чтобы при измерении |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
тела покоились или двигались прямолинейно и равномерно! |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
Динамометр градуируется известной силой тяжести. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
1-й закон Ньютона. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Роль 1-го закона – он |
|||||||||||||||||
Существуют такие системы отсчета, относительно которых тело движется прямолинейно и |
|
|
|
|
|
|
определяет, в каких СО |
||||||||||||||||||||||||||||||||||
равномерно или покоится, если на него не действуют другие тела или их действия скомпенсированы. |
|
выполняются законы |
|||||||||||||||||||||||||||||||||||||||
Другая формулировка: существуют такие системы отсчета, относительно которых тело |
|
|
динамики. |
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
движется прямолинейно и равномерно или покоится, если равнодействующая всех сил, действующих |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
на тело, равна нулю. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Инерциальные системы отсчета. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
СО, в которых выполняется 1-й закон Ньютона, называются инерциальными системами |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
отсчета (ИСО). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Свойство ИСО: все СО, движущиеся прямолинейно и равномерно относительно данной ИСО, |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
тоже являются инерциальными. СО, движущиеся относительно любой ИСО с ускорением, являются |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
неинерциальными |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
В реальной жизни абсолютной ИСО не существует. СО можно считать инерциальной с той или |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
иной степенью точности в определенных задачах. Например, Землю можно считать ИСО при |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
исследовании движения автомобиля и нельзя – при исследовании полета ракеты (необходимо |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
учитывать вращение). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Принцип относительности Галилея. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
Все ИСО – равноправны: законы механики одинаковы во всех ИСО. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
Опыт: чем больше сила, тем больше изменение скорости тела (ускорение) - |
a F. |
|
|
|
|
|
|
|
|
a F |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
2-й закон Ньютона. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Непосредственно решает |
||||||||||||||||||
Ускорение, полученное телом в результате взаимодействия, прямо пропорционально |
|
основную задачу |
|||||||||||||||||||||||||||||||||||||||
равнодействующей всех сил, действующих |
на тело, и обратно пропорционально массе |
|
|
динамики. |
|||||||||||||||||||||||||||||||||||||
тела:a F . Выражение справедливо для любых сил любой природы. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
|||||||||||||||||||||||||
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
m |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
14
Сила (равнодействующая сил) определяет только ускорение тела. Величины скорости и перемещения могут быть любыми в зависимости от начальных условий.
Третий закон Ньютона.
Из опыта: 1. a1m1 a2m2 .
2. Ускорения взаимодействующих тел направлены по одной прямой в противоположных
направлениях. Вывод: a1m1 a2m2 или F1 F2 .
Любые два тела взаимодействуют силами одной природы направленными вдоль одной прямой, равными по величине и противоположными по направлению.
Свойства этих сил:
1.Всегда действуют парами.
2.Одной природы.
3.Приложены к разным телам! (F1- к первому телу, F2 – ко второму телу). Нельзя складывать! Не
уравновешивают друг друга!
Система законов динамики. Законы Ньютона выполняются в системе, т.е. одновременно и только в инерциальных системах отсчета. 1-й закон позволяет отобрать ИСО. 2-й закон позволяет по известным силам найти ускорение тела. 3-й закон позволяет связать между собой взаимодействующие тела. Все эти законы следуют из опыта.
Механические свойства твердых тел. |
|
|
|
|
|
Твердым телом в механике называется неизменимая система материальных |
Растяжение |
||||
точек, т.е. такая идеализированная система, при любых движениях которой |
|
|
|
|
|
|
|
|
|
||
взаимные расстояния между материальными точками системы остаются |
|
|
|
|
|
неизменными (материальные точки - достаточно малые макроскопические частицы). |
|
|
|
|
|
Силы притяжения и отталкивания обуславливают механическую прочность |
|
|
|
|
|
твердых тел. т. е. их способность противодействовать изменению формы и объема. |
|
|
|
|
|
Растяжению тел препятствуют силы межатомного притяжения, а сжатию - силы |
|
|
|
|
|
отталкивания. |
|
|
|
|
|
Недеформируемых тел в природе не существует. |
|
|
|
|
|
Деформация - изменение формы или объема тела под действием внешних сил. |
|
|
|
|
|
Деформация может быть упругая или неупругая. |
|
|
|
|
|
|
|
|
|
|
|
Упругая деформация - деформация, при которой после прекращения действия |
|
|
|
|
|
силы размеры и форма тела восстанавливаются. |
|
|
|
|
|
|
Сдвиг |
|
|
||
Виды деформаций: |
|
|
|
|
|
1. Линейная: |
|
|
|
|
|
а) Растяжение (тросы подъемных кранов, канатных дорог, буксирные тросы) |
|
|
|
|
|
б) Сжатие (колонны, стены, фундаменты зданий). |
|
|
|
|
|
2. Сдвиг (заклепки, болты, соед. металлические конструкции, процесс разрезания |
|
|
|
|
|
ножницами бумаги). |
|
|
|
|
|
3. Кручение (завинчивание гаек, работа валов машин, сверление металлов и т.п.). |
|
|
|
|
|
4. Изгиб (формально деформация растяжения и сжатия, различная в разных частях |
|
|
|
|
|
тела. Нейтральный слой - слой, не подвергающийся ни |
|
|
|
|
|
растяжению, ни сжатию, при изгибе.) |
|
|
|
|
|
|
|
|
|
|
|
Деформацию растяжения и сжатия можно охарактеризовать абсолютной |
|
|
|
|
|
деформацией ℓ, равной разности длин образца после растяжения ℓ и до него ℓ0: ℓ |
ℓ = ℓ – ℓ0 |
||||
= ℓ – ℓ0 |
|||||
|
|
|
|
||
|
|
|
|||
Отношение абсолютной деформации ℓ к первоначальной длине образца ℓo |
ε |
|
|
||
|
0 |
||||
|
|
|
|||

15
называют относительной деформацией: ε |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Если деформация упругая, а относительная деформацияИз опыта: F k |- |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
закон Гука. Сила упругости прямо пропорциональна абсолютной деформации. |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
С учетом направления: |
|
|
|
|
|
F -k или |
|
F -kx |
|
|
|
|
|
|
|
|
|
||||||||||||
k - коэффициент жесткости (упругости). Зависит от материала, формы и размеров |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
тела (Например, чем длиннее и тоньше пружина, тем ее жесткость меньше.) |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
Единицы коэффициента упругости в СИ: k |
Н |
. |
|
|
|
F -k |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
м |
|
|
|
|
|
F -kx |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Движение под действием силы упругости. |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
- kx ma a |
k |
x |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
||||
- ускорение изменяется с координатой! Это неравнопеременное движение. Такое |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
движение является колебательным. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
Частные случаи силы упругости: |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
1. Сила реакции опоры N- направлена всегда перпендикулярно поверхности. |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
2. Сила натяжения (нити, сцепки) T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Физическая величина, равная отношению модуля силы упругости Fупр, |
|
F |
|
|
|
||||||||||||||||||||||||
возникающей при деформации, к площади сечения S образца, перпендикулярного |
|
|
|
||||||||||||||||||||||||||
S |
|
|
|||||||||||||||||||||||||||
вектору силы F. называется механическим напряжением: |
F |
. За единицу |
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
σ |
Н |
|
|
Па |
||||||
механического напряжения в СИ принята единица паскаль (Па): 1 Па= 1Н/м2. |
|
|
|||||||||||||||||||||||||||
м2 |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
Отношение механического напряжения к относительному удлинению , при малых |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
упругих деформациях растяжения и сжатия, называется модулем упругости Е |
|
|
|
|
σ |
|
|
||||||||||||||||||||||
(модулем Юнга): E |
σ |
|
F |
0 |
|
|
. |
|
|
|
|
|
|
|
E |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
ε |
|
|
||||||||||||||||||
ε |
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
Из выше написанной формулы видно, что модуль Юнга Е величина не зависящая от |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
формы и размеров предмета, изготовленных из данного материала. [Е]=Па. Модуль |
[Е]=Па |
||||||||||||||||||||||||||||
Юнга показывает, какое надо создать механическое напряжение, чтобы |
|||||||||||||||||||||||||||||
деформировать тело в 2 раза (Если ε 1 2 0 - на самом деле нереально). |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
Если обозначить k E |
S |
, |
|
|
|
|
|
|
|
|
|
|
|
k E |
|
|
|
S |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
то получим Fупр =k| l| - закон Гука. Другая форма записи этого закона: = E| | - |
= E| | |
||||||||||||||||||||||||||||
механическое напряжение прямо пропорционально модулю относительной |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
деформации. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Диаграмма растяжения-сжатия |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
п - предел пропорциональности (максимальное напряжение, при котором |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
деформация еще остается упругой и выполняется закон Гука) |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
уп - предел упругости (максимальное напряжение, при котором еще не возникают |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
заметные остаточные деформации, и материал еще сохраняет упругие свойства) |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
т - предел текучести (напряжение, при котором материал "течет") |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
пч - предел прочности (наибольшее напряжение, которое способен выдержать |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
образец без разрушения) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ост- остаточная деформация |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Коэффициент безопасности (предел прочности) - отношение предела |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
пропорциональности данного материала к максимальному напряжению, которое |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
16
будет испытывать деталь конструкции в работе: n σg .
σ
В зависимости от необходимой надежности различных деталей и конструкций коэффициент безопасности выбирают обычно в пределах от 2 до 10.
ВЕС.
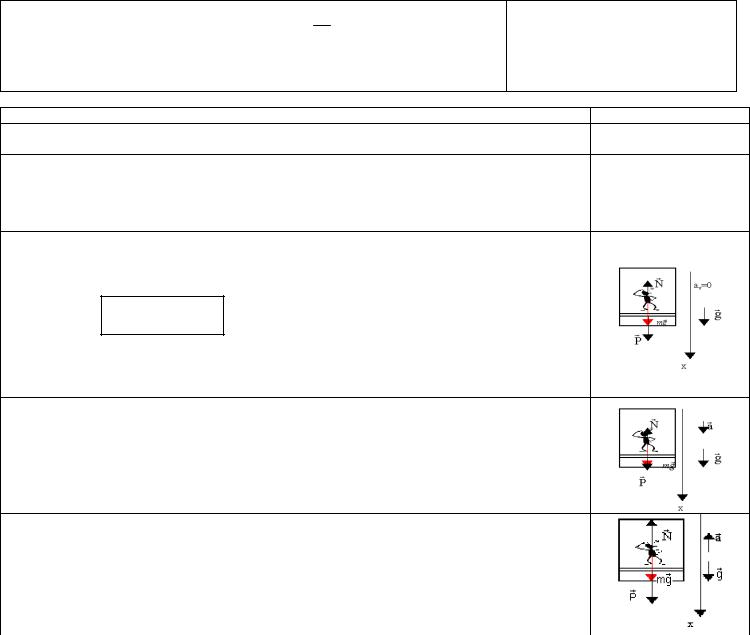
Сила, с которой все тела действуют на горизонтальную опору или вертикальный подвес вследствие притяжения Земли, наз. весом тела.
Внимание! Вес - сила, следовательно, измеряется в ньютонах. [P]=Н
Вес тела по третьему закону Ньютона - сила, парная к силе упругости (реакции опоры, натяжения нити). Значит по своей природе вес - сила упругости, возникающая в опоре или подвесе! Вектор силы веса тела приложен к опоре или подвесу. Следовательно, если нет опоры или подвеса, то нет и веса.
В общем случае выполняются соотношения:
ma =mg+N - второй закон Ньютона
N = -P - третий закон Ньютона.
Следовательно: P m (g a)
-это формула для расчета веса тела в общем случае.
Впроекциях на ось Х: рассмотрим три случая (см. рисунок).
P=mg - вес тела в состоянии покоя или прямолинейного равномерного движения.
P=m(g-a) - вес тела в случае, когда вектор ускорения совпадает по направлению с вектором ускорения свободного падения. В этом случае сила веса по модулю меньше силы тяжести.
При a=g P=0 - состояние невесомости. Т.е., если тело свободно падает, то оно не имеет веса.
P=m(g+a) - вес тела в случае, когда вектор ускорения противоположен по направлению вектору ускорения свободного падения.
|
|
|
|
P |
m(g a) |
a |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
k |
|
|
|
|
|
1 |
|
|
- перегрузка. |
|
|
|
|
|
|
|
|
||||
|
|
mg |
mg |
|
g |
|
|
|
|
|
|
|
|
||||||||||
Летчики и космонавты испытывают перегрузку в 5 -7 раз. Максимальная статическая перегрузка |
|
|
|
||||||||||||||||||||
для человека - 13g, динамическая (короткодействующая) - до 20g. |
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Трение. |
|
|
|
|
|
|
|
|
||
|
Название |
силы |
|
Природа взаимодейст |
вия |
|
Формула |
|
Направление |
|
Условие |
|
|
Примечание |
|
||||||||
|
|
|
|
|
|
|
|
|
|
применимости |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
Электро- |
|
|
|
|
|
|
Противоположно |
|
Равна |
по величине |
|
|
|
|
|
||||
Сила |
трени |
покоя |
|
магнитная |
|
|
|
|
|
|
силе, |
приложенной к |
|
и противоположна |
Зависит |
от |
рода |
|
|||||
|
|
|
|
|
|
|
|
|
|
телу, |
вдоль |
|
по |
направлению |
трущихся поверхностей. |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
F N |
|
поверхности |
|
приложенной силе. |
N - сила реакции опоры. |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
соприкосновения. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Электро- |
|
F N |
|
|
|
Противоположно |
|
Формула |
|
- |
коэффициент трения |
|
|||||||
|
|
скольжения |
|
магнитная |
|
(закон |
|
|
|
направлению вектора |
|
выполняется |
|
скольжения. |
Зависит от |
|
|||||||
Сила |
трения |
|
|
|
|
|
|
|
|
относительной |
|
приближенно, |
т.к. |
давления, от |
площади |
|
|||||||
|
|
|
|
|
|
|
|
Кулона – |
|
|
|
|
рода |
|
трущихся |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
скорости движения. |
|
сила |
трения |
материалов, |
|
от |
|
|||||
|
|
|
|
|
|
|
|
Амонтона) |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
зависит |
от |
обработки поверхностей. |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
скорости. |
|
Не |
зависит |
|
от силы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
соприкасающихся |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
поверхностей. |
|
|
||

17
|
|
|
Электро- |
Сила |
трения |
качения |
магнитная |
|
|||
|
|
) |
Электро- |
|
спротивления |
жидкоготрения |
магнитная |
Сила |
|
||
|
|
( |
|
|
|
|
|
График:
1. Трение покоя.
2. Трение скольжения. v=const =tg .
3. Жидкое трение.
F |
N |
|
Противоположно |
Формула |
|
- коэффициент трения |
|
|
направлению вектора |
выполняется |
качения |
||||
R |
|||||||
|
|
относительной |
приближенно, т.к. |
|
|||
|
|
|
скорости движения. |
сила |
трения |
|
|
|
|
|
|
зависит |
от |
|
|
|
|
|
|
скорости. |
|
||
F= v |
|
Противоположно |
До определенной |
Коэффициенты |
|||
F= v2 |
|
вектору скорости. |
скорости |
|
пропорциональности |
||
|
|
|
|
выполняется |
зависят от рода среды, |
||
|
|
|
|
формула F=αv, а |
формы и размеров тела. |
||
|
|
|
|
затем |
- F=βv2. |
Коэффициенты |
|
|
|
|
|
Какую |
формулу |
размерны. |
|
|
|
|
|
применять |
|
||
|
|
|
|
устанавливают на |
|
||
|
|
|
|
опыте. |
|
|
|
При
Искусственные спутники
Первая космическая скорость (круговая скорость) - наименьшая начальная скорость, которую необходимо сообщить телу, чтобы оно стало искусственным спутником планеты (для Земли - 7,9 км/с) - траектория 1.
|
2 (R h) |
|
|
|
M |
|
v |
(R h)g G |
|||||
T |
R h |
|||||
Вторая космическая скорость (параболическая скорость) - наименьшая начальная скорость, которую необходимо сообщить телу, для того, чтобы оно могло преодолеть притяжение планеты (для Земли - 11,2 км/с) - траектория 3.
Третья космическая скорость - наименьшая начальная скорость, при которой тело покидает Солнечную систему (для Земли -16,6 км/с) - траектория 4.
Законы Кеплера.
1609г. – Кеплер публикует работу (новая астрономия). Она посвящена изучению движения Марса по наблюдениям Тихо Браге и содержащая первые два закона движения планет.
1612г. – “Гармония мира”, в которой он дал формулировку третьего закона объединяющего теорию движения планет в стройное целое.
1627г. – “Рудольфовые таблицы” – последняя крупная работа Кеплера. Эта работа подвела итог многолетних трудов по обработке наблюдений Тихо Браге. Эти таблицы давали возможность в удобной форме вычислять для любого момента времени положение планет с высокой точностью (для той эпохи).

18
Эмпирические законы Кеплера навсегда вошли в основу теоретической астрономии, получили |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
объяснения в механике И. Ньютона, в частности – в законе всемирного тяготения. |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
В дальнейшем законы Кеплера уточнялись и в результате получили такую формулировку: |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
I |
|
|
|
|
|
|
|
|
|
|
|
|||
Каждая из планет обращается вокруг солнца по эллипсу, причем Солнце находится в |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
одном из его фокусов. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
II |
|
|
|
|
|
|
|
|
|
|
|
|||
В равные промежутки времени, радиус-вектор и планеты описывают равные площади. |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
III |
|
|
|
|
|
|
|
|
|
|
|
|||
Кубы средних расстояний от планет до Солнца пропорциональны квадратам периодов обращний |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
планет вокруг Солнца. |
|
|
|
|
|
|
|
|
|
|
|
|||
Три закона движения планет открытые Кеплером, в начале 17 века, явились обоснованием и |
3 |
|
|
|
|
|
2 |
|
|
|||||||||||||||
дальнейшим развитием гелиоцентрического учения Коперника. Эти законы являются важнейшим |
|
r1 |
|
|
|
T1 |
|
|
||||||||||||||||
|
|
T22 |
|
|
||||||||||||||||||||
аргументом в пользу центрального положения солнца, положившая конец геоцентрической системе |
|
r23 |
|
|
||||||||||||||||||||
Птоломея. Солнце занимая один из фокусов эллиптической орбиты планеты, является, по Копернику |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
источником силы движущей планеты. |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
Давление |
|
|
|
|
|
|
|
|
|
|
|
|
||
Если на тело действует сила и под действием этой силы тело деформируется, то эту силу часто |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
называют силой |
|
давления. |
Роль силы давления может играть любая сила (вес тела, |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
деформирующий опору; сила, прижимающая тело к какой-либо поверхности и т.д.). Скалярная |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
физическая величина, |
равная отношению силы, действующей перпендикулярно поверхности, к |
|
p |
F |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
|||||
площади этой поверхности, называется давлением: p |
. |
|
S |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
диница давления в СИ называется паскаль (Па), в честь французского физика и философа |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Б.Паскаля. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Единица давления в СИ называется паскаль (Па), в честь французского физика и философа Б. |
|
1Па |
1Н |
|
|
|
|
|||||||||||||||||
Паскаля. Давление равно 1 Па, если на поверхность тела площадью 1 м2 действует |
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||
перпендикулярно ей сила 1 Н. |
|
|
|
|
|
|
|
1м2 |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
Архимедова (выталкивающая) сила. |
|
|
|
|
|
|
|
|
|
|
|
|
||||
1. Давление столба жидкости или газа. |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
p |
F |
|
mg |
|
Vg |
gh , |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
S |
S |
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где S - площадь, h - высота столба жидкости или газа, - плотность жидкости или газа. |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Внимание! Давление столба жидкости или газа (гидростатическое давление) не зависит от формы |
|
p gh |
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
сосуда. |
|
|
|
|||||||||||
2. Причины возникновения выталкивающей силы. |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
p3=p4 , т.к. одинаковые глубины. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
F2>F1, т.к. глубина h2>h1. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Fвыталкивающая=F2 |
- F1 |
- |
причина возникновения выталкивающей силы в разности сил |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
(давлений) на разных глубинах. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Внимание! Эта формула применима всегда! |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Fвыталкивающая=p2S -p1S=Sg (h2 - h1)= g V, |
|
FАрх ρж gVт |
|
|||||||||||||||||||||
где - плотность жидкости или газа, |
|
|
||||||||||||||||||||||
V - объем погруженной части тела. |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
Т.к. m= V - масса жидкости, вытесненной телом, то Fвыт=FАрх.=mжg=Pж |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
На тело, погруженное в жидкость (или газ), действует выталкивающая сила, равная весу |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
жидкости (газа), вытесненной телом. |
|
|
|
|
|
|
|
|
|
|
|
|
||||
3. Вес тела, погруженного в жидкость или газ. |
|
P mg ρ |
|
gV |
|
|||||||||||||||||||
В состоянии покоя P0=mg. Если тело погружено в жидкость или газ, то P=P0-FАрх=Р0 - Pж |
|
ж |
|
|||||||||||||||||||||
Тело, погруженное в жидкость или газ, теряет в своем весе столько, сколько весит |
|
|
|
|
|
|
|
|
|
Т |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
вытесненная им жидкость. |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
19 |
4. Условия плавания тел. |
|
а) Если FАрх >mg |
- тело всплывает, до тех пор, пока силы не уравновесятся. |
б) FАрх<mg |
- тело тонет. |
в) FАрх=mg |
- тело плавает в любой точке жидкости (газа). |
5. Подъемная сила.
Fп=FАрх-mg - максимальный вес, который может поднять плавающее тело.
СТАТИКА. УСЛОВИЯ РАВНОВЕСИЯ ТЕЛ.
Статика - раздел механики, в котором рассматривается равновесие тел.
Равновесие тел - состояние механической системы, в которой тела остаются неподвижными по отношению к выбранной системе отсчета.
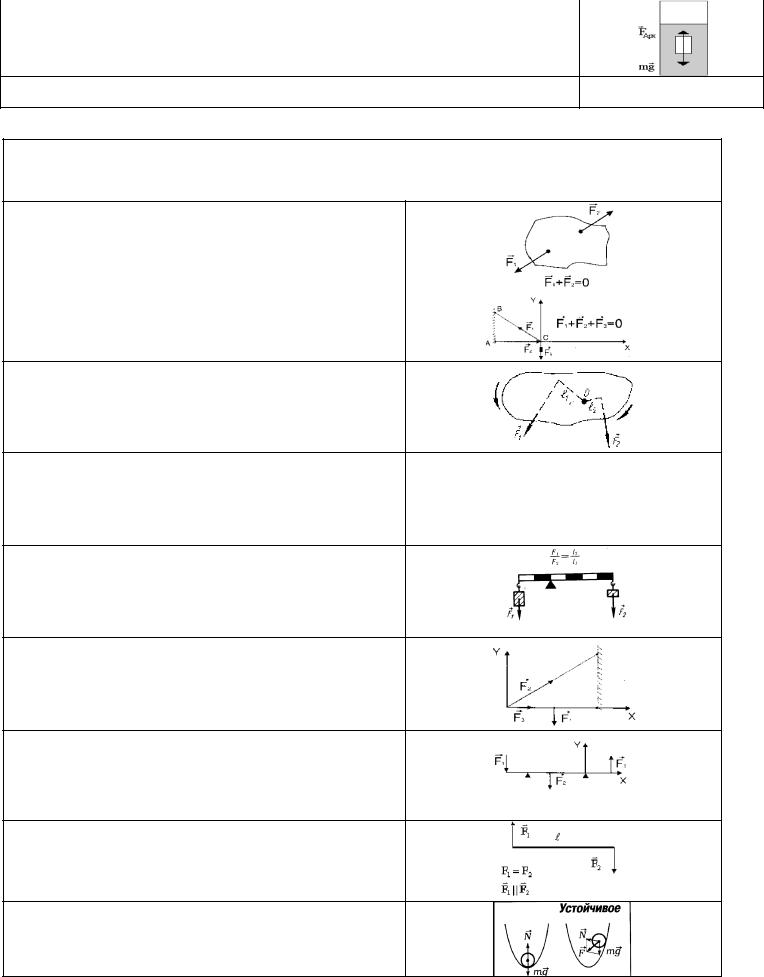
Равновесие тел при отсутствии вращения (линии действия сил пересекаются в одной точке): Векторная сумма всех сил,
действующих на тело, равна нулю (алгебраическая сумма проекций всех сил на любую ось равна нулю). F 0или
Fx 0
Fy 0
F 0z
Момент силы - равен произведению силы на плечо: M F l Плечо силы - расстояние от оси вращения до линии действия силы. (обозначают буквами ℓ или d).
Момент силы, вращающий тело против часовой стрелки, считают положительным, по часовой стрелке - отрицательным.
Центр масс - точка, через которую должна проходить линия действия силы, чтобы под действием этой силы тело двигалось поступательно.
Центр тяжести - точка приложения силы тяжести, действующей на тело. В однородном поле тяготения центр тяжести и центр масс совпадают.
Рычаг (Архимед). Разновидности рычага: блок, ворот.
Условие равновесия рычага: отношение сил обратно пропорционально отношению плеч этих сил.
"Золотое правило механики": выигрывая в силе проигрываешь в расстоянии.
Равновесие тел при отсутствии вращения (линии действия сил не пересекаются в одной точке):
1.Векторная сумма всех сил, действующих на тело, равна нулю;
2.Алгебраическая сумма моментов всех сил, действующих на тело, относительно любой точки равна нулю.
F 0
Т.е.
M 0
ПАРА СИЛ: Момент пары: M F l
Пару нельзя уравновесить одной силой
(равной величины)!
Примеры: завинчивание гайки гаечным ключом, вращение рамки с током в магнитном поле и т.д.
Виды равновесия:
Устойчивое: При малом отклонении тела от положения равновесия возникает сила, стремящаяся возвратить тело в исходное состояние.
20
Безразличное: При малом отклонении тело остается в равновесии.
Неустойчивое: При малом отклонении тела из положения равновесия возникают силы, стремящиеся увеличить это отклонение.
В положении устойчивого равновесия тело обладает минимальной потенциальной энергией. При выведении тела из этого положения его потенциальная энергия увеличивается. Если работу над телом совершает только сила тяжести, то в положении устойчивого равновесия центр тяжести тела находится на наименьшей высоте.
Все тела стремятся к минимуму потенциальной энергии. (Потенциальная яма).
Равновесие тел на опоре: линия действия силы тяжести проходит через площадь опоры (Пизанская башня). Чем ниже центр тяжести, тем более устойчиво равновесие.
Импульс. Закон сохранения импульса. |
|
|
|
|||||||
При решении динамических задач необходимо знать какие силы действуют на тело, закон, |
|
|
|
|||||||
позволяющий рассчитать конкретную силу. Цель: получить решение задачи механики исходя из |
|
|
|
|||||||
начальных условий, не зная конкретного вида взаимодействия. |
|
|
|
|
|
|
||||
Законы Ньютона в полученной ранее форме не позволяют решать задачи на движение тела с |
|
|
|
|||||||
переменной массой и при скоростях, сравнимых со скоростью света. Цель: получить записи законов |
|
|
|
|||||||
Ньютона в форме, справедливой для этих условий. |
|
|
|
|
|
|
|
|
||
Импульс силы Векторная физическая величина, являющаяся мерой действия силы за некоторый |
|
I F t |
|
|||||||
промежуток времени. I - импульс силы F за малый промежуток времени t. |
|
|
||||||||
|
|
|
||||||||
Вектор импульса силы сонаправлен с вектором силы. |
|
[ I ]= Н.с |
||||||||
Импульс тела. (Количество движения) |
Векторная физическая величина, являющаяся мерой |
|
p mv |
|
||||||
механического движения и равная произведению массы тела на его скорость. |
|
|
|
|||||||
|
|
|
||||||||
Вектор импульса тела сонаправлен с вектором скорости тела. |
[ p ]= кг м/с |
|||||||||
|
|
|
|
|
|
|
|
|||
Основное уравнение динамики |
|
|
|
|||||||
|
v v0 |
|
|
mv mv0 |
|
p p0 |
|
|
|
|
Из второго закона Ньютона: F ma m |
|
|
|
|
|
|
|
|||
t |
t |
t |
|
|
|
|||||
|
|
|
|
|
|
|||||
|
p |
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|||||
Тогда получим: F |
|
- |
|
|
|
|||||||
|
|
|
|
|||||||||
|
t |
|
|
t |
|
|
F |
|
|
|
|
|
|
|
|
|
t |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||
второй закон Ньютона в импульсной форме |
|
|
|
|
|
|
|
|
||||
( t = t - t0 = t при t0 = 0). |
|
|
|
|
|
|
|
|
|
|
||
Импульс силы равен изменению импульса тела. |
Вектора импульса силы и изменения импульса |
|
|
|
|
|||||||
тела сонаправлены. |
|
|
|
|
|
F t (mv) |
||||||
|
|
|
|
|
|
|
|
|
||||
Неупругий удар (шарик "прилипает" к стенке): |
|
|
|
|
|
|
|
|
||||
p mv0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Абсолютно упругий удар (шарик отскакивает с прежней по величине скоростью): |
|
|
|
|
|
|
|
|||||
p 2mv |
|
|
|
|
|
|
|
|
|
|
|
|