

1. Кинема́тика точки — раздел кинематики, изучающий математическое описание движения материальных точек. Основной задачей кинематики является описание движения при помощи математического аппарата без выяснения причин, вызывающих это движение.
Основная задача механики – определить положение тела в любой момент времени.Механическое движение – это изменение положения тела в пространстве с течением времени относительно других тел.Материальная точка – тело, размерами которого в условиях данной задачи можно пренебречь.Система отсчета – тело отсчета, система координат, связанная с ним, и прибор для измерения времени.
Перемещение – направленный отрезок (вектор) между начальным и конечным положением тела.Траектория (l) – линия, вдоль которой движется тело.
Путь (S) – длина траектории.Скорость (V) – величина, показывающая какой путь проходит тело за единицу времени.
Скорость движения Средняя путевая скорость Мгновенная скорость/ скорость движения.За единицу скорости принимают скорость такого равномерного прямолинейного движения, при котором тело за одну секунду перемещается на один метр.
Ускорение – это величина, показывающая, как изменяется скорость за одну секунду.Равномерное прямолинейное движениеРавномерным прямолинейным движением называется такое прямолинейное движение, при котором материальная точка (тело) движется по прямой и в любые равные промежутки времени совершает
одинаковые перемещения.Вектор скорости равномерного прямолинейного движения материальной точки направлен вдоль ее траектории в сторону движения. Вектор скорости при равномерном прямолинейном движении равен вектору перемещения за любой промежуток времени, поделенному на этот промежуток времени:Равнопеременное прямолинейное движение
Равнопеременным называется движение, при котором скорость тела(материальной точки) за любые равные промежутки времени изменяется одинаково, т.е. на равные величины. Это движение может быть равноускоренным и
равнозамедленным.Если направление ускорения а совпадает с направлением скорости V точки, движение называется равноускоренным. Если направление векторов а и V противоположны, движение называется равнозамедленным.
При равнопеременном прямолинейном движении ускорение остается
постоянным и по модулю и по
направлению (а = const). При этом
среднее ускорение аср равно
мгновенному ускорению а вдоль траектории точки. Нормальное ускорение при этом отсутствует (аn=0).
Изменение скорости ∆v = v - v0 в течении промежутка времени ∆t = t - t0 при равнопеременном прямолинейном движении равно: ∆v = a·∆t, или v - v0 = a·(t - t0).
2. Криволинейные движения – движения, траектории которых представляют собой не прямые, а кривые линии. По криволинейным траекториям движутся планеты, воды рек. Частным случаем криволинейного движения – является движение по окружности. Движение по окружности, даже равномерное, всегда есть движение ускоренное: модуль скорости все время направлен по касательной к траектории, постоянно меняет направление, поэтому движение по окружности всегда происходит с центростремительным ускорением.
![]() где
r – радиус окружности.
где
r – радиус окружности.
Вектор
ускорения при движении по окружности
направлен к центру окружности и
перпендикулярно вектору скорости. При
криволинейном движении ускорение можно
представить как сумму нормальной
![]() и тангенциальной
и тангенциальной![]() составляющих:
составляющих:
![]() -
нормальное (центростремительное)
ускорение, направлено к центру кривизны
траектории и характеризует изменение
скорости по направлению:
-
нормальное (центростремительное)
ускорение, направлено к центру кривизны
траектории и характеризует изменение
скорости по направлению:
![]() v
– мгновенное значение скорости, r –
радиус кривизны траектории в данной
точке.
v
– мгновенное значение скорости, r –
радиус кривизны траектории в данной
точке.
- тангенциальное (касательное) ускорение, направлено по касательной к траектории и характеризует изменение скорости по модулю.Полное ускорение, с которым движетсяматериальная точка, равно:
3. Частным случаем криволинейного движения – является движение по окружности. Движение по окружности, даже равномерное, всегда есть движение ускоренное: модуль скорости все время направлен по касательной к траектории, постоянно меняет направление, поэтому движение по окружности всегда происходит с центростремительным ускорением.
![]() где
r – радиус окружности.
где
r – радиус окружности.
Вектор ускорения при движении по окружности направлен к центру окружности и перпендикулярно вектору скорости.Кроме центростремительного ускорения, важнейшими
характеристиками равномерного движения по окружности являются период и частота обращения.
Вращательное движение тела или точки характеризуется углом поворота, угловой скоростью и угловым ускорением.
Угол поворота φ - это угол между двумя последовательными положениями радиуса вектора r, соединяющего тело или материальную точку с осью вращения. Угловое перемещение измеряется в радианах.Угловая скорость (w) – векторная физическая величина, показывающая, как изменяется угол поворота в единицу времени и численно равная первой производной от угла поворота по времени, т.е
.
![]()
Направление
вектора угловой скорости
![]() совпадает с направлением вектора
углового перемещения, т.е. вектора,
численно равного углу φ и параллельного
оси вращения; При равномерном вращении
численное значение угловой скорости
не меняется, т.е. ω = const.Равномерное
вращение характеризуется: -
периодом вращения Т, т.е. временем, за
которое тело делает один полный оборот,
период обращения измеряется в с;-
частотой, измеряемой в Гц и показывающей
число оборотов в с;
совпадает с направлением вектора
углового перемещения, т.е. вектора,
численно равного углу φ и параллельного
оси вращения; При равномерном вращении
численное значение угловой скорости
не меняется, т.е. ω = const.Равномерное
вращение характеризуется: -
периодом вращения Т, т.е. временем, за
которое тело делает один полный оборот,
период обращения измеряется в с;-
частотой, измеряемой в Гц и показывающей
число оборотов в с;
![]() -
круговой (циклической,угловой) частотой
(это та же самая угловая скорость).
-
круговой (циклической,угловой) частотой
(это та же самая угловая скорость).
![]() Связь
между линейными и угловыми величинами,
характеризующими движение
Связь
между линейными и угловыми величинами,
характеризующими движение
Отдельные точки вращающегося тела имеют различные линейные скорости v, которые непрерывно изменяют свое направление и зависят от угловой скорости ω и расстояния r
соответствующей точки до оси вращения. Точка, находящаяся на расстоянии r от оси вращения проходит путь ΔS = rΔφ.
4. Динамика изучает движение тела в связи с теми причинами
(взаимодействиями между телами), которые обуславливают тот или иной характер движения.Инерциальные системы отсчета и первый закон Ньютона:Поэтому формулировке первого закона можно придать следующий вид: скорость любого тела остается постоянной, пока воздействие на это тело других тел не вызовет ее изменения. Система отсчета, в которой выполняется первый закон Ньютона, называется инерциальной, Система отсчета, в которой первый закон Ньютона не выполняется, называется неинерциальной системой отсчета. Инерциальных систем существует бесконечное множество. Любая система отсчета, движущаяся относительно некоторой инерциальной системы прямолинейно и равномерно, будет также инерциальной. Система отсчета, связанная с земной поверхностью, движется с ускорением относительно гелиоцентрической системы отсчета и не является инерциальной. Однако ускорение такой системы настолько мало, что в большом числе случаев ее можно считать практически
инерциальной. Но иногда неинерциальность системы отсчета, связанной с Землей, оказывает существенное влияние на характер рассматриваемых относительно нее механических явлений.
5. Фундамента́льные взаимоде́йствия — различные, не сводящиеся друг к другу типы взаимодействия элементарных частиц и составленных из них тел. На сегодня достоверно известно существование четырех
фундаментальных взаимодействий: гравитационного, электромагнитного, сильного и слабого взаимодействий.
Гравита́ция (всеми́рное тяготе́ние, тяготе́ние) (от лат. gravitas — «тяжесть») — дальнодействующее фундаментальное взаимодействие в природе, которому подвержены все материальные тела.
Электромагнитное взаимодействие — одно из четырёх фундаментальных взаимодействий. Электромагнитное взаимодействие существует между частицами, обладающими электрическим
зарядом.Си́льное взаимоде́йствие (цветово́е взаимоде́йствие, я́дерное взаимоде́йствие) — одно из четырёх фундаментальных взаимодействий в физике. Сильное взаимодействие действует в масштабах атомных ядер и меньше, отвечая за притяжение между нуклонами в ядрах и между кварками в адронах.Слабое взаимодействие, или слабое ядерное взаимодействие — одно из четырех фундаментальных взаимодействий в природе..Это взаимодействие называется слабым, поскольку два других взаимодействия, значимые для ядерной физики (сильное и электромагнитное), характеризуются значительно большей интенсивностью.
Второй
закон Ньютона:Второй
закон Ньютона описывает движение
частицы, вызванное влиянием окружающих
тел, и устанавливает связь между
ускорением частицы, ее массой и силой,
с которой на нее действуют эти тела:
Если на частицу с массой т окружающие
тела действуют с силой
![]() ,
то эта частица приобретает такое
ускорение
,
то эта частица приобретает такое
ускорение![]() ,
что произведение ее массы на ускорение
будет равно действующей силе.
,
что произведение ее массы на ускорение
будет равно действующей силе.
Математически
второй закон Ньютона записывается в
виде:
![]()
На основе этого закона устанавливается единица силы — 1 Н (ньютон). 1 Н — это сила, с которой нужно действовать на тело массой 1 кг, чтобы сообщить ему ускорение 1 м/с2. Второй закон Ньютона часто называют основным законом динамики, так как именно в нем находит наиболее полное математическое выражение принцип причинности и именно он, наконец, позволяет решить основную задачу механики. Для этого нужно выяснить, какие из окружающих частицу тел оказывают на нее
существенное действие, и, выразив каждое из этих действий в виде соответствующей силы, следует составить уравнение движения данной частицы. Масса в механике – это мера инертности тела; мера гравитационных свойств.Третий закон Ньютона ( не вып-ся в электродинамике)Третий закон Ньютона утверждает, что силы, с которыми действуют друг на друга взаимодействующие тела, равны по величине и противоположны по направлению, т.е.
![]()
6. Импульсом, или количеством движения материальной точки называется векторная величина, равная произведению массы материальной точки m на скорость ее движения v.
Уравнение движения центра масс:
![]() Смысл
уравнения таков: произведение массы
системы на ускорение центра масс равно
геометрической сумме внешних сил,
действующих на тела системы. Как видим,
закон движения центра масс напоминает
второй закон Ньютона. Если внешние силы
на систему не действуют или сумма внешних
сил равна нулю, то ускорение центра масс
равно нулю, а скорость его неизменна во
времени по модулю и наплавлению, т.е. в
этом случае центр масс движется равномерно
и прямолинейно.Закон
Сохранения Импульса Для
вывода закона сохранения импульса
рассмотрим некоторые понятия. Совокупность
материальных точек (тел), рассмат риваемых
как единое целое, называется механической
системой. Силы взаимодействия между
материальными точками ме ханической
системы называются внутрен ними. Силы,
с которыми на материальные точки системы
действуют внешние тела, называются
внешними. Механическая система тел, на
которую не действуют
Смысл
уравнения таков: произведение массы
системы на ускорение центра масс равно
геометрической сумме внешних сил,
действующих на тела системы. Как видим,
закон движения центра масс напоминает
второй закон Ньютона. Если внешние силы
на систему не действуют или сумма внешних
сил равна нулю, то ускорение центра масс
равно нулю, а скорость его неизменна во
времени по модулю и наплавлению, т.е. в
этом случае центр масс движется равномерно
и прямолинейно.Закон
Сохранения Импульса Для
вывода закона сохранения импульса
рассмотрим некоторые понятия. Совокупность
материальных точек (тел), рассмат риваемых
как единое целое, называется механической
системой. Силы взаимодействия между
материальными точками ме ханической
системы называются внутрен ними. Силы,
с которыми на материальные точки системы
действуют внешние тела, называются
внешними. Механическая система тел, на
которую не действуют
внешние силы, называется замкнутой (или изолированной). Если мы имеем механиче скую систему, состоящую из многих тел, то, согласно третьему закону Ньютона, силы, действующие между этими телами, будут равны и противоположно направле ны, т. е. геометрическая сумма внутренних сил равна нулю.
где
![]()
импульс системы. Таким образом, производная по времени от им пульса механической системы равна гео метрической сумме внешних сил, действующих на систему.В случае отсутствия внешних сил
(рассматриваем замкнутую систему)
Это выражение и является законом сохранения импульса: импульс замкнутой системы сохраняется, т. е. не изменяется с течением времени.
7.Уравнения движения тел с переменной массой являются следствиями законов Ньютона. Тем не менее, они представляют большой интерес, главным образом, в связи с ракетной техникой.
Принцип действия ракеты очень прост. Ракета с большой скоростью выбрасывает вещество (газы), воздействуя на него с большой силой. Выбрасываемое вещество с той же, но противоположно направленной силой, в свою очередь, действует на ракету и сообщает ей ускорение в противоположном направлении. Если нет внешних сил, то ракета вместе с выброшенным веществом является замкнутой системой. Импульс такой системы не может меняться во времени. На этом положении и основана теория движения ракет.
Основное
уравнение движения тела переменной
массы при любом законе изменения массы
и при любой относительной скорости
выбрасываемых частиц было получено В.
И. Мещерским в его диссертации 1897 г. Это
уравнение имеет следующий вид:
![]()
m- масса , a – ускорение , F – сила , Fр – реактивная сила
8. Моментом импульса (моментом количества движения) материальной точки относительно неподвижной точки О называется вектор L, равный векторному произведению радиус-вектора r, проведенного из точки О в место нахождения материальной точки, на вектор p ее импульса
Момент
импульса
![]() материальной точки относительно
некоторого начала отсчёта определяетсявекторным
произведениемеёрадиус-вектораиимпульса:
материальной точки относительно
некоторого начала отсчёта определяетсявекторным
произведениемеёрадиус-вектораиимпульса:![]() где
где![]() —
радиус-вектор частицы относительно
выбранного неподвижного в данной системе
отсчёта начала отсчёта,
—
радиус-вектор частицы относительно
выбранного неподвижного в данной системе
отсчёта начала отсчёта,![]() —импульс
частицы.Моментом
силы F
относительно неподвижной точки О
называется векторная величина М, равная
векторному произведению радиус-вектора
r, проведенного из точки О в точку А
приложения силы, на вектор силы F (правило
рычага)
—импульс
частицы.Моментом
силы F
относительно неподвижной точки О
называется векторная величина М, равная
векторному произведению радиус-вектора
r, проведенного из точки О в точку А
приложения силы, на вектор силы F (правило
рычага)
момент
силы частицы определяется как векторное
произведение:![]() где
где![]() —
сила, действующая на частицу, а
—
сила, действующая на частицу, а![]() —радиус-векторчастицы.
—радиус-векторчастицы.
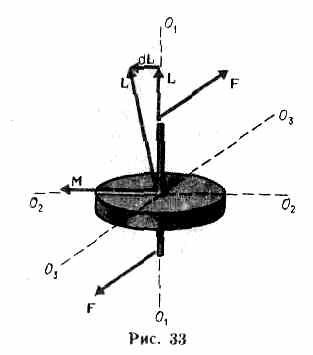
Главным моментом силы (результирующим моментом) нескольких сил относительно неподвижной точки О (полюса) называется вектор М, равный геометрической сумме моментов относительно точки О всех действующих силУравнение моментов:Первая производная по времени t от момента импульса L механической системы относительно любой неподвижной точки О равна главному моменту Мвнешн относительно той же точки О всех внешних сил, приложенных к системе (основной закон динамики твердого тела, вращающегося вокруг неподвижной точки)гироскопы — массивные од нородные тела, вращающиеся с большой угловой скоростью около своей оси сим метрии, являющейся свободной осью.
Если момент внешних сил, приложенных к вращающемуся гироскопу относительно его центра масс, отличен от нуля, то наблюдается явле ние, получившее название гироскопичес кого эффекта. Оно состоит в том, что под действием пары сил F, приложенной к оси вращающегося гироскопа, ось ги роскопа поворачивается вокруг прямой О3О3, а не вокруг прямой О2О2, как это казалось бы естественным на первый взгляд (O1O1 и О2О2 лежат в плоскости чертежа, а О3О3 и силы F перпендикуляр ны ей).
9. Момент инерции.
Движение твердого тела, при котором все точки прямой АВ, жестко связанной с телом, остаются неподвижными, называется вращением тела вокруг неподвижной оси АВ.
![]()
Такое
твердое тело имеет одну степень свободы
и его положение в пространстве полностью
определяется значением угла поворота
вокруг оси вращения из некоторого,
условно выбранного, начального положения
этого тела. Мерой перемещения тела за
малый промежуток времени dt полагают
вектор
![]() элементарного поворота тела. По модулю
он равен углу поворота тела за время
dt, а его направление совпадает с
направлением поступательного движения
правого буравчика, направление вращения
рукоятки которого совпадает с направлением
вращения тела (рис. 1). Вектор угловой
скорости
элементарного поворота тела. По модулю
он равен углу поворота тела за время
dt, а его направление совпадает с
направлением поступательного движения
правого буравчика, направление вращения
рукоятки которого совпадает с направлением
вращения тела (рис. 1). Вектор угловой
скорости![]() Izz
–
момент инерции относительно неподвижной
оси.
Izz
–
момент инерции относительно неподвижной
оси.
Основной закон динамики твердого тела, вращающегося вокруг неподвижной оси ZДля тела, вращающегося вокруг оси z
![]() ,
,
![]() -
момент инерции тела относительно оси
вращения z,
-
момент инерции тела относительно оси
вращения z,![]() -
угловое ускорение тела,
-
угловое ускорение тела,![]() -
сумма моментов сил, приложенных к телу,
и рассчитанных
-
сумма моментов сил, приложенных к телу,
и рассчитанных
относительно
оси вращения,
![]() -
индекс суммирования.Моментом
инерции механической системы относительно
неподвижной оси а называется физическая
величина Ja,
равная сумме произведений масс m всех
n материальных точек системы на квадраты
их расстояний r до оси
-
индекс суммирования.Моментом
инерции механической системы относительно
неподвижной оси а называется физическая
величина Ja,
равная сумме произведений масс m всех
n материальных точек системы на квадраты
их расстояний r до оси
![]() ,где:
mi —
масса i-й точки, ri —
расстояние от i-й точки до оси.
,где:
mi —
масса i-й точки, ri —
расстояние от i-й точки до оси.
10.
![]() Рассмотрим
вращение стержня вокруг некоторой оси
Z (см. рис. 6.8). Кинетическую энергию
стержня можно представить в виде:
Рассмотрим
вращение стержня вокруг некоторой оси
Z (см. рис. 6.8). Кинетическую энергию
стержня можно представить в виде:
Eк = I·w2/2. где I - момент инерции стержня относительно оси Z. Учитывая, что для случая движения по окружности справедливо соотношение Vc = d·w, и приравнивая приведенные выше выражения для кинетической энергии стержня, получим уравнение, которое является выражением теоремыШтейнера:
I = Ic + m·d2/2. Момент инерции тела относительно произвольной оси вращения равен его моменту инерции относительно параллельной оси, проходящей через центр масс тела, плюс произведение массы на квадрат расстояния между этими осями.
11. Кинетическая энергия материальной точки и абсолютно твердого тела.
Кинетической
энергией
материальной точки называется скалярная
величина, которая равняется половине
произведения массы точки на квадрат ее
скорости.Кинетическаяэнергия:характеризует
и поступательное и вращательное
движения;не зависит от направления
движения точек системы и не характеризует
изменение этих направлений;характеризует
действие и внутренних и внешних
сил.Кинетическая энергия системы
равняется сумме кинетических энергий
тел системы. Кинетическая энергия
зависит от вида движения тел
системы.Кинетическая
энергия твёрдого
тела.Для твёрдого тела имеет место
формула:
![]()
Нужно различать кинетическую энергию твёрдого тела при различных видах его движения.Кинетическая энергия тела твёрдого движущегося оступательно.При поступательном движении, все скорости одинаковы.
12. Работа переменной силы. Если сила или равнодействующая сил изменяет свою величину или направление (движение по криволинейной траектории, причем угол α ≠ 900), то работа ∆А, совершаемая переменной силой F (или Fрез) на конечном участке траектории вычисляется следующим образом.На рисунке 14 представлен график зависимости силы F от пути S. Разобьем весь путь на N участков. Перемещение и действующая сила на каждом участке соответственно равны F i и ∆ r i. Тогда работа А, совершаемая силой F, равна алгебраической сумме работ, совершаемых каждой из сил F i на своем малом участке (Рисунок 14):
А
= ∆А1
+ ∆А2
+....+ ∆А N
= ( F1∙∆
r1)
+ (F
2∙∆
r2)
+ ...+( F
N∙∆
rN)
= ![]() ( Fi∙∆
ri),
( Fi∙∆
ri),
где i = 1,2...... N - номер элементарного участка траектории.
![]()
Мо́щность
— физическая
величина,
равная в общем случае скорости изменения
энергии системы. В более узком смысле
мощность равна отношению работы,
выполняемой за некоторый промежуток
времени, к этому промежутку времени.Различают
среднюю мощность за промежуток времени
![]()
![]() и
мгновенную мощность в данный момент
времени:
и
мгновенную мощность в данный момент
времени:
![]()
Потенциальными (консервативными) силами называются такие силы, работа которых зависит только от начальных и конечных положений точек их
приложения и не зависит ни от вида траекторий этих точек, ни от законов их движения по траекториям.
Консервативные силы – гравитационные, электростатические.Потенциальные силы создают стационарное поле, в котором работа силы зависит только от начального и конечного положений перемещаемой точки.Если внешние тела, создающие рассматриваемое поле, могут двигаться относительно инерциальной системы, то это поле не будет
стационарным. Но нестационарное поле потенциально, если работа, совершаемая силой F при мгновенном переносе точки ее приложения вдоль любой траектории L, равна нулю.К непотенциальным относятся диссипативные и
гироскопические силы. Диссипативными силами называются силы, суммарная работа которых при любых перемещениях замкнутой системы всегда отрицательна (например, силы трения). Гироскопическими силами называются силы, зависящие от скорости
материальной точки, на которую они действуют, и направленные
перпендикулярно к этой скорости (например, сила Лоренца, действующая со стороны магнитного поля на движущуюся в нем заряженную частицу). Работа гироскопических сил всегда равна нулю.Мощностью (мгновенной мощностью) называется скалярная величина N, равная отношению элементарной работы А к малому промежутку времени dt, в течение которого эта работа совершается.Средней мощностью называется величина<N>, равная отношению работы А, совершаемой за промежуток времени t, к продолжительности этого промежутка
Потенциальной энергией называется часть энергии механической системы, зависящая только от ее конфигурации. Убыль потенциальной энергии при перемещении системы из одного произвольного положения в другое произвольное положение измеряется работой, которую совершают при этом все стационарные потенциальные силы (внешние и внутренние), действующие на систему где Wп(1) и Wп(2) – значения потенциальной энергии системы в начальном и конечном положениях.
При малом изменении конфигурации системы.Для нестационарных потенциальных сил.Потенциальная энергия материальной точки Wп связана с силовой функцией соответствующего потенциального поля соотношением или где С – постоянная интегрирования.
13. Результаты ньютоновских расчетов теперь называют законом всемирного тяготения Ньютона. Согласно этому закону между любой парой тел во Вселенной действует сила взаимного притяжения. Как и все физические законы, он облечен в форму математического уравнения. Если M и m — массы двух тел, а D — расстояние между ними, тогда сила F взаимного гравитационного притяжения между ними равна:
F = GMm/D2 где G — гравитационная константа, определяемая экспериментально. В единицах СИ ее значение составляет приблизительно 6,67 × 10–11.Поле тяготения — физическое поле, через которое осуществляется равитационное взаимодействие
В
рамках классической
физики
гравитационное
взаимодействие
описывается «законом всемирного
тяготения» Ньютона,
согласно которому сила гравитационного
притяжения между двумя материальными
точками с массами m1
и
m2
пропорциональна
обеим массам и обратно пропорциональна
квадрату расстояния между ними:
![]()
Здесь
![]() —
гравитационная
постоянная,
приблизительно равная
—
гравитационная
постоянная,
приблизительно равная
![]() м³/(кг
с²),
м³/(кг
с²),
![]() —
расстояние между точками.
—
расстояние между точками.
Для расчёта поля в более сложных случаях, когда тяготеющие массы нельзя считать материальными точками, можно воспользоваться тем фактом, что поле ньютоновского тяготения потенциально. Если обозначить плотность вещества ρ, то потенциал поля φ удовлетворяет уравнению Пуассона:
![]() Напряжённость
гравитацио́нного по́ля
— векторная величина, характеризующая
гравитационное
поле
в данной точке и численно равная отношению
силы тяготения, действующей на тело,
помещённое в данную точку поля, к
гравитационной
массе
этого тела:
Напряжённость
гравитацио́нного по́ля
— векторная величина, характеризующая
гравитационное
поле
в данной точке и численно равная отношению
силы тяготения, действующей на тело,
помещённое в данную точку поля, к
гравитационной
массе
этого тела:![]()
14. Гравитационные поля (поля тяготения) являются потенциальными, то есть работа поля по перемещению тела из точки 1 в точку 2 не зависит от формы траектории, а определяется лишь разностью потенциальных энергий тела в точках 1 и 2 соответственно:
A12 = П1 – П2. Из этого равенства ясно, что определенный физический смысл имеет лишь разность потенциальных энергий в различных точках поля.
Космические скорости.
Первая космическая скорость — скорость, которую необходимо придать баллистическому снаряду, пренебрегая сопротивлением атмосферы и вращением планеты, чтобы поместить его на круговую орбиту с радиусом равном радиусу планеты. Иными словами, первая космическая скорость — это скорость, с которой надо бросить камень в горизонтальном направлении, чтобы он больше не упал на Землю. Для вычисления первой космической скорости необходимо рассмотреть равенство центробежной силы и силы тяготения действующих на снаряд на круговой орбите.
![]()
![]()
где
m — масса снаряда, M — масса планеты,
G — гравитационная постоянная
(6,67259·10−11 м³·кг−1·с−2),
![]() —
первая космическая скорость, R —
радиус планеты. Подставляя численные
значения (для Земли, M = 5,97·1024 кг,
R = 6 378 000 м), найдем
—
первая космическая скорость, R —
радиус планеты. Подставляя численные
значения (для Земли, M = 5,97·1024 кг,
R = 6 378 000 м), найдем
![]() 7,9 км/с
7,9 км/с
Первую
космическую скорость можно определить
через ускорение свободного падения —
так как g = GM/R², то![]() .
.
Первой
космической скорости недоста точно для
того, чтобы тело могло выйти из сферы
земного притяжения. Необходимая для
этого скорость называется второй кос
мической. Второй
космической (или
пара
болической) скоростью v2
называют ту наименьшую скорость, которую
надо со общить телу, чтобы оно могло
преодолеть притяжение Земли и превратиться
в спут ник Солнца, т. е. чтобы его орбита
в поле тяготения Земли стала параболической.
Для того чтобы тело (при отсутствии со
противления среды) могло преодолеть
земное притяжение и уйти в космическое
пространство, необходимо, чтобы его
кине тическая энергия была равна работе,
совершаемой против сил тяготения:Между
первой и второй космическими скоростями
существует простое соотношение:![]()
Для того чтобы покинуть пределы солнечной системы, тело должно преодолеть, кроме сил притяжения к земле, также и силы притяжения к Солнцу. Необходимая для этого скорость запуска тела с поверхности Земли называется третьей космической скоростью V3. Скорость V3 зависит от направления запуска. При запуске в направлении орбитального движения Земли эта скорость минимальна и составляет около 17 км/с. При запуске в направлении, противоположном направлению движения Земли, V3 равняется примерно 73 км/с.
15. Абсолютно неупругим ударом, называется столкновение двух тел, в результате которого они соединяются вместе и движутся дальше как одно тело.
Сталкивающиеся тела деформируются, возникают упругие силы и т.д. Однако если удар неупругий то, в конце концов все эти процессы прекращаются, и в дальнейшем оба тела, соединившись вместе, движутся как единое твёрдое тело. Рассмотрим абс. неупругий удар на примере столкновения двух шаров. Пусть они движутся вдоль прямой, соединяющей их центры, со скоростями v1 и v2. В этом случае говорят что удар является центральным. Обозначим за V общую скорость шаров после соударения. Закон сохр. Импульса даёт:
m1v1+m2v2=(m1+m2)V V=(m1v1+m2v2)/(m1+m2)
Кин. энергии системы до удара и после: K1=1/2(m1v12+m2v22) K2=1/2(m1+m2)V
Пользуясь этими выраж. получаем: K1-K2=1/2v1v2v1-v2)
где =m1m2/(m1+m2) приведенная масса шаров. Таким образом, при столкновении двух абсолютно неупругих шаров происходит потеря кин. энергии макроскопического движения, равная половине произведения приведённой массы на квадрат относительной скорости.Абсолютно упругим ударом называется столкновение тел, в результате которого их внутренние энергии не меняются. Пример: Столкновение бильярдных шаров из слоновой кости, при столкновениях атомных, ядерных частиц. Рассмотрим центральный удар двух шаров, движущ-ся навстречудруг другу:
(m1v12)/2+(m2 v22)/2=(m1u12)/2+(m2 u22)/2
и: m1v1+m2v2=m1u1+m2u2
u1=[(m1-m2)v1+2m2v2]/(m1 +m2)
u2=[(m2-m1)v2+2m1v1]/(m1+m2)
При столкновении двух одинаковых абсолютно упругих шаров они просто обмениваются скоростями.
16. Давление в Жидкости. Закон Паскаля
В жидкостях частицы подвижны, поэтому они не имеют собственной формы, но обладают собственным объемом, сопротивляются сжатию и растяжению; не сопротивляются деформации сдвига (свойство текучести).
В покоящейся жидкости существует два вида статического давления: гидростатическое и внешнее. Вследствие притяжения к Земле жидкость оказывает давление на дно и стенки сосуда, а также на тела, находящиеся внутри нее. Давление, обусловленное весом столба жидкости, называется гидростатическим. Давление жидкости на разных высотах различно и не зависит от ориентации площадки, на которую оно производится.
Пусть жидкость находится в цилиндрическом сосуде с площадью сечения S; высота столба жидкости h. Тогда
![]()
Гидростатическое давление жидкости зависит от плотности р жидкости, от ускорения g свободного падения и от глубины h, на которой находится рассматриваемая точка. Оно не зависит от формы столба жидкости.
Глубина h отсчитывается по вертикали от рассматриваемой точки до уровня свободной поверхности жидкости.
В условиях невесомости гидростатическое давление в жидкости отсутствует, так как в этих условиях жидкость становится невесомой.
|
На тело, погруженное в жидкость или газ, действует выталкивающая сила, равная весу того количества жидкости или газа, которое вытеснено погруженной частью тела.
| ||
|
Теорема 1. Архимеда |
Сила Архимеда, действующая на погруженное в жидкость тело, может быть рассчитана по формуле:
|
FА = ρжgVпт, |
где ρж – плотность жидкости, Vпт – объем погруженной в жидкость части тела.
Закон Бернулли является следствием закона сохранения энергии для стационарного потока идеальной (то есть без внутреннего трения) несжимаемой жидкости:
![]()
Здесь
![]() —
плотность
жидкости,
—
плотность
жидкости,
![]() —
скорость
потока,
—
скорость
потока,
![]() —
высота,
на которой находится рассматриваемый
элемент жидкости,
—
высота,
на которой находится рассматриваемый
элемент жидкости,
![]() —
давление
в точке пространства, где расположен
центр массы рассматриваемого элемента
жидкости,
—
давление
в точке пространства, где расположен
центр массы рассматриваемого элемента
жидкости,
![]() —
ускорение
свободного падения
—
ускорение
свободного падения
Закон
Бернулли позволяет объяснить эффект
Вентури:
в узкой части трубы скорость течения
жидкости выше, а давление меньше, чем
на участке трубы большего диаметра, в
результате чего наблюдается разница
высот столбов жидкости
![]() ;
бо́льшая часть этого перепада давлений
обусловлена изменением скорости течения
жидкости, и может быть вычислена по
уравнению Бернулли
;
бо́льшая часть этого перепада давлений
обусловлена изменением скорости течения
жидкости, и может быть вычислена по
уравнению Бернулли
17.Вя́зкость (вну́треннее тре́ние) — одно из явлений переноса, свойство текучих тел (жидкостей и газов) оказывать сопротивление перемещению одной их части относительно другой. В результате происходит рассеяние в виде тепла работы, затрачиваемой на это перемещение.Механизм внутреннего трения в жидкостях и газах заключается в том, что хаотически движущиеся молекулы переносят импульс из одного слоя в другой, что приводит к выравниванию скоростей — это описывается введением силы трения. Вязкость твёрдых тел обладает рядом специфических особенностей и рассматривается обычно отдельно.
Различают динамическую вязкость (единицы измерения: Па·с = 10 пуаз) и кинематическую вязкость (единицы измерения: стокс, м²/с, внесистемная единица — градус Энглера).
Прибор для измерения вязкости называется вискозиметром.
ДВИЖЕНИЕ
ТЕЛ В ЖИДКОСТЯХ И ГАЗАХ Всем
реальным жидкостям присуща вязкость
или внутреннее трение, что приводит к
появлению у них принципиально новых
свойств. В частности, возникшее в жидкости
движение после прекращения действия
причин, его вызвавших, постепенно
замедляется. При движении тела в такой
жидкости на него действуют силы.
Равнодействующую этих сил обозначим
через
![]() .
Силу
.
Силу
![]() можно
разложить на две составляющих (рис.
6.5):
можно
разложить на две составляющих (рис.
6.5):
![]() .
Силу
.
Силу
![]() называют
лобовым сопротивлением, а
называют
лобовым сопротивлением, а
![]() –
подъемной силой.Если жидкость обладает
вязкостью, то очень тонкий слой жидкости
прилипает к поверхности тела и движется
с ним как одно целое, увлекая за собой
из-за трения последующие слои. По мере
удаления от тела скорость уменьшается,
то есть тело оказывается окруженным
пограничным слоем жидкости, в котором
скорость изменяется в направлении,
перпендикулярном скорости. В нем
действуют силы трения, которые в конечном
итоге оказываются приложенными к телу
и приводят к лобовому сопротивлению.
Кроме того, из-за сил трения поток
отрывается от поверхности тела, в
результате чего позади тела возникают
вихри. Вихри уносятся потоком и постепенно
затухают вследствие трения. Давление
в образующейся за потоком вихревой
области оказывается пониженным, поэтому
результирующая сил давления будет
отлична от нуля, что в свою очередь
обусловливает лобовое сопротивление.
–
подъемной силой.Если жидкость обладает
вязкостью, то очень тонкий слой жидкости
прилипает к поверхности тела и движется
с ним как одно целое, увлекая за собой
из-за трения последующие слои. По мере
удаления от тела скорость уменьшается,
то есть тело оказывается окруженным
пограничным слоем жидкости, в котором
скорость изменяется в направлении,
перпендикулярном скорости. В нем
действуют силы трения, которые в конечном
итоге оказываются приложенными к телу
и приводят к лобовому сопротивлению.
Кроме того, из-за сил трения поток
отрывается от поверхности тела, в
результате чего позади тела возникают
вихри. Вихри уносятся потоком и постепенно
затухают вследствие трения. Давление
в образующейся за потоком вихревой
области оказывается пониженным, поэтому
результирующая сил давления будет
отлична от нуля, что в свою очередь
обусловливает лобовое сопротивление.
18.Под действием внешних сил тела меняют свою форму и размеры. Такие изменения называются деформациями. Различаются упругие и пластические деформации. Если после прекращения приложенных сил деформация исчезает, то деформация является упругой, а если не исчезает – пластической.энергия упругой деформации./Модуль Юнга (модуль упругости) — физическая величина, характеризующая свойства материала сопротивляться
растяжению/сжатию при упругой деформации[1]. Назван в честь английского физика XIX века Томаса Юнга. В динамических задачах механики модуль Юнга рассматривается в более общем смысле — как функционал среды и процесса. В Международной системе единиц (СИ) измеряется в ньютонах на метр в квадрате или в паскалях.
Модуль Юнга рассчитывается следующим образом:
![]()
где:
E — модуль упругости,
F — сила,
S — площадь поверхности, по которой распределено действие силы,
l — длина деформируемого стержня,
X — модуль изменения длины стержня в результате упругой деформации (измеренного в тех же единицах, что и длина l).
Через
модуль Юнга вычисляется скорость
распространения продольной волны в
тонком стержне:![]()
где
![]() —
плотность
вещества.
—
плотность
вещества.
Деформированное тело может совершить работу, так как оно обладает запасом потенциальной энергии, называемой упругой энергией. Она равна работе сил, затраченной на деформацию тела, не увеличивая его кинетической энергии. Вычислим теперь энергию упругой деформации стержня. Приложим к стержню растягивающую силу
![]()
![]()
![]()
![]()
![]()
![]() ,
,
Энергия упругой деформации распределена по всему объему тела.
Энергия
![]()
![]()
![]()
![]()
![]()
![]() ,
приходящая на единицу объема тела,
называемая объемной
плотностью упругой энергии,
равна:
,
приходящая на единицу объема тела,
называемая объемной
плотностью упругой энергии,
равна:
![]()
![]()
![]()
![]() Под
действием приложенной силы изменяются
не только продольные, но и поперечные
размеры стержня. Отношение относительного
поперечного сжатия к соответствующему
продольному удлинению называется
Под
действием приложенной силы изменяются
не только продольные, но и поперечные
размеры стержня. Отношение относительного
поперечного сжатия к соответствующему
продольному удлинению называется
коэффициентом Пуассона:
![]()
![]()
![]()
![]()
![]()
Заметим,
что
![]()
![]()
![]()
![]()
![]()
![]() и
и
![]()
![]()
![]()
![]()
![]()
![]() всегда
имеют противоположные знаки – при
растяжении
всегда
имеют противоположные знаки – при
растяжении
![]()
![]()
![]()
![]()
![]()
![]()
![]() ,
,
![]()
![]()
![]()
![]()
![]()
![]()
![]() ,
а при сжатии – наоборот.
,
а при сжатии – наоборот.
19.Колеба́ния — повторяющийся в той или иной степени во времени процесс изменения состояний системы около точки равновесия. Например, при колебаниях маятника повторяются отклонения его в ту и другую сторону от вертикального положения; при
колебаниях в электрическом колебательном контуре повторяются величина и направление тока, текущего через катушку.Колебания почти всегда связаны с попеременным превращением энергии одной формы проявления в другую форму.Колебания различной физической природы имеют много общих закономерностей и тесно взаимосвязаны c волнами. Поэтому исследованиями этих закономерностей занимается обобщённая теория колебаний и волн. Принципиальное отличие от волн: при колебаниях не происходит переноса энергии, это, так сказать, «местные» преобразования энергии.Характеристики
Амплитуда
— максимальное отклонение колеблющейся
величины от некоторого усреднённого
её значения для системы,
![]() (м)
Период
— промежуток времени, через который
повторяются какие-либо показатели
состояния системы (система совершает
одно полное колебание),
(м)
Период
— промежуток времени, через который
повторяются какие-либо показатели
состояния системы (система совершает
одно полное колебание),
![]() (с)
Частота
— число колебаний в единицу времени,
(с)
Частота
— число колебаний в единицу времени,
![]() (Гц,
с−1).
(Гц,
с−1).
Период
колебаний
![]() и
частота
и
частота
![]() —
обратные величины;
—
обратные величины;
![]() и
и
![]() В
круговых или циклических процессах
вместо характеристики «частота»
используется понятие круговая
(циклическая)
частота
В
круговых или циклических процессах
вместо характеристики «частота»
используется понятие круговая
(циклическая)
частота
![]() (рад/с,
Гц, с−1),
показывающая число колебаний за
(рад/с,
Гц, с−1),
показывающая число колебаний за
![]() единиц
времени:
единиц
времени:
![]() Смещение
— отклонение тела от положения равновесия.
Обозначение Х, Единица измерения
метр.Фаза
колебаний
— определяет смещение в любой момент
времени, то есть определяет состояние
колебательной системы.Скорость
и ускорение точки, совершающей
гармонические колебания
Смещение
— отклонение тела от положения равновесия.
Обозначение Х, Единица измерения
метр.Фаза
колебаний
— определяет смещение в любой момент
времени, то есть определяет состояние
колебательной системы.Скорость
и ускорение точки, совершающей
гармонические колебания
![]()
Колебательная скорость — величина, равная произведению амплитуды колебаний частиц среды, через которую проходит периодическая звуковая волна, на угловую частоту:v = Aω Единица измерения — метр в секунду (м/с). Для синусоидальной волны колебательная скорость равна амплитуде скорости колеблющихся частиц среды.
|
Ускорение
колебаний а меняется
во времени по закону синуса или
косинуса:
|
v - скорость колебаний |
м/с |
|
ω - циклическая частота колебаний |
рад/с | |
|
t - время колебаний |
с | |
|
x - координата, смещение маятника от положения равновесия |
м | |
|
A - амплитуда колебаний (x max) |
м | |
|
φ0 - начальная фаза |
рад | |
|
|
м/с2 |
20.Векторные диаграммы
Графическое представление гармонических колебаний. Векторные диаграммыНаиболее часто употребляются три способа графического представления колебаний.1. Задание графика колебаний х = f(t) в прямоугольной системе координат. По оси абсцисс откладывается время t, а по оси ординат — значение изменяющейся величины х (смещения, скорости, ускорения и др.). Для гармонических колебаний этот график — косинусоида (см. рис. 13.3) или синусоида.
![]()
![]()
Рис. 13.3
2. Спектральный способ. По оси ординат откладывается амплитуда, а по оси абсцисс — частота гармонических колебаний. Так, например колебательный процес x=5cos4t (м) будет представлен в этом случае вертикальным отрезком прямой длиной 5 м, проведенным от точки с координатой ω = 4 Гц на оси абсцисс (рис. 13.4). Этот способ не дает никакой информации о фазе колебания.
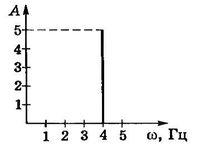
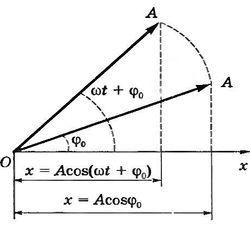 Рис.
13.5
Рис.
13.5
![]()
Рис. 13.4
3. Способ векторных диаграмм. Пусть величина х изменяется со временем по закону x=Acos(ωt+φ 0 ). На плоскости выбирают произвольно направленную координатную ось Ох. Из начала координат под углом φ 0 , равным начальной фазеколебаний, проводят вектор A ⃗, модуль которого равен амплитуде гармонического колебания A (рис. 13.5). Если вектор A ⃗ вращается
вокруг точки О с постоянной угловой скоростью ω против часовой стрелки, то угол φ между вращающимся вектором и осью Ох в любой момент времени определится выражением φ=(ωt+φ 0 ). Проекция конца вектораA ⃗ будет перемещаться по оси Ох и принимать значения от —А до +А, а колеблющаяся величина будет изменяться со временем по закону x=Acos(ωt+φ 0 ).
Таким образом, гармоническое колебание можно представить проекцией на некоторую произвольно выбранную ось вектора амплитуды A ⃗, отложенного от произвольной точки оси под углом φ 0, равным начальной фазе, и вращающегося с угловой скоростью ω вокруг этой точки.Дифференциальное уравнение гармонических колебаний материальной точки
![]() ,
или
,
или
![]() ,
где m — масса точки; k — коэффициент
квазиупругой силы (k=тω2). Полная энергия
материальной точки, совершающей
гармонические колебания,
,
где m — масса точки; k — коэффициент
квазиупругой силы (k=тω2). Полная энергия
материальной точки, совершающей
гармонические колебания,
![]()
• Период колебаний тела, подвешенного на пружине (пружинный маятник),
![]()
где m — масса тела; k — жесткость пружины. Формула справедлива для упругих колебаний в пределах, в которых выполняется закон Гука (при малой массе пружины в сравнении с массой тела).
.
21.Пружинный маятник — механическая система, состоящая из пружины с коэффициентом упругости (жёсткостью) k (закон Гука), один конец которой жёстко закреплён, а на втором находится груз массы m.Когда на массивное тело действует упругая сила, возвращающая его в положение равновесия, оно совершает колебания около этого положения.Такое тело называют пружинным маятником.
Второй закон Ньютона для такой системы при условии отсутствия внешних сил и сил трения имеет вид:
![]()
Если на систему оказывают влияние внешние силы, то уравнение колебаний перепишется так:
![]() ,
где f(x)
— это равнодействующая внешних сил
соотнесённая к единице массы груза.
,
где f(x)
— это равнодействующая внешних сил
соотнесённая к единице массы груза.
В случае наличия затухания, пропорционального скорости колебаний с коэффициентом c:
![]()
Физический маятник — осциллятор, представляющий собой твёрдое тело, совершающее колебания в поле каких-либо сил относительно точки, не являющейся центром масс этого тела, или неподвижной оси,перпендикулярной направлению действия сил и не проходящей через центр масс этого тела.
Момент инерции относительно оси, проходящей через точку подвеса:
![]() .
.
Дифференциальное уравнение движения физического маятника
Пренебрегая сопротивлением среды, дифференциальное уравнение колебаний физического маятника в поле силы тяжести записывается следующим образом:
![]() .
.
Центр качания — точка, в которой надо сосредоточить всю массу физического маятника, чтобы его период колебаний не изменился.Действительно, если всю массу сосредоточить в центре качания, то центр качания будет совпадать с центром масс. Тогда момент инерции
относительно
оси подвеса будет равен
![]() ,
а момент
силы
тяжести относительно той же оси
,
а момент
силы
тяжести относительно той же оси
![]() .
Легко заметить, что уравнение движения
не изменится.
.
Легко заметить, что уравнение движения
не изменится.
Теорема Гюйгенса
Если физический маятник подвесить за центр качания, то его период колебаний не изменится, а прежняя точка подвеса сделается новым центром качания /
Совпадение приведённых длин для двух случаев и доказывает утверждение, сделанное в теореме.
период
![]()
Период
малых колебаний физического маятника
/Если
амплитуда колебаний
![]() мала,
то корень в знаменателе эллиптического
интеграла приближенно равен единице.
Такой интеграл легко берется, и получается
хорошо известная формула малых колебаний:
мала,
то корень в знаменателе эллиптического
интеграла приближенно равен единице.
Такой интеграл легко берется, и получается
хорошо известная формула малых колебаний:
![]() .
.
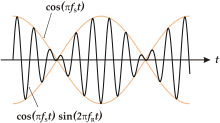
22.Бие́ния — явление, возникающее при наложении двух гармонических колебаний, близких по частоте, выражающееся в периодическом уменьшении и увеличении амплитуды суммарного сигнала. Биения модулируются по амплитуде. Распространение такого вида колебаний менее эффективно. Частота изменения амплитуды суммарного сигнала равна разности частот двух исходных сигналов.
Биения возникают от того, что один из двух сигналов постоянно отстаёт от другого по фазе и в те моменты, когда колебания происходят синфазно, суммарный сигнал оказывается усилен, а в те моменты, когда два сигнала оказываются в противофазе, они взаимно гасят друг друга. Эти моменты периодически сменяют друг друга по мере того как нарастает отставание.
Биения звука можно слышать при настройке струнного музыкального инструмента по камертону. Если частота струны незначительно отличается от частоты камертона, то слышно, что звук пульсирует — это и есть биения. Струну нужно подтягивать или ослаблять так, чтобы частота биений уменьшалась. При совпадении высоты звука с эталонным биения полностью исчезают. Биения звука также можно услышать при игре на музыкальных инструментах, например пианино или гитаре, когда различной высоты звуки создают интервалы и многозвучия (аккорды).Эффект биений можно использовать для преобразования частоты сигналов.
 Представление
периодической функции связывают с
понятием
гармонического анализа сложного
периодического колебания, или
разложения Фурье.*
Слагаемые
ряда Фурье, определяющие гармонические
колебания с частотами w0,
2w0,
3w0,
..., называются
первой
(или основной),
второй, третьей и
т. д.
гармониками
сложного периодического колебания.Рассмотрим
сложение
двух однонаправленных колебаний с
неравными, но близкими частотами,
то есть
Представление
периодической функции связывают с
понятием
гармонического анализа сложного
периодического колебания, или
разложения Фурье.*
Слагаемые
ряда Фурье, определяющие гармонические
колебания с частотами w0,
2w0,
3w0,
..., называются
первой
(или основной),
второй, третьей и
т. д.
гармониками
сложного периодического колебания.Рассмотрим
сложение
двух однонаправленных колебаний с
неравными, но близкими частотами,
то есть![]() ,
и пусть для определенности
,
и пусть для определенности
![]() .
Для простоты пусть начальные фазы и
амплитуды этих колебаний равны. В
результате сложения двух колебаний
.
Для простоты пусть начальные фазы и
амплитуды этих колебаний равны. В
результате сложения двух колебаний
![]()
![]()
получим уравнение суммарного колебания:
![]()
Полученное результирующее колебание не является гармоническим.
23.При сложении взаимно перпендикулярных колебаний необходимо найти уравнение траектории тела, то есть из уравнений колебаний типа x = x(t), y = y(t) исключить t и получить зависимость типа y(x).
например, сложим два колебания с одинаковыми частотами:
![]()
![]()
исключив время, получим:
![]()
В
общем случае это - уравнение эллипса.
Вид траектории при сложении взаимно
перпендикулярных колебаний зависит от
соотношения амплитуд, частот и начальных
фаз складываемых колебаний. Получающиеся
кривые носят название фигур Лиссажу.
Фигу́ры
Лиссажу́
— замкнутые
траектории,
прочерчиваемые точкой, совершающей
одновременно два гармонических
колебания
в двух взаимно перпендикулярных
направлениях. Впервые изучены французским
учёным Жюлем
Антуаном Лиссажу.
Вид фигур зависит от соотношения между
периодами
(частотами),
фазами и амплитудами
обоих колебаний. В простейшем случае
равенства обоих периодов фигуры
представляют собой эллипсы, которые
при разности фаз 0 или
![]() вырождаются
в отрезки прямых, а при разности фаз
вырождаются
в отрезки прямых, а при разности фаз
![]() и
равенстве амплитуд превращаются в
окружность. Если периоды обоих колебаний
неточно совпадают, то разность фаз всё
время меняется, вследствие чего эллипс
всё время деформируется. При существенно
различных периодах фигуры Лиссажу не
наблюдаются. Однако, если периоды
относятся как целые числа, то через
промежуток времени, равный наименьшему
кратному обоих периодов, движущаяся
точка снова возвращается в то же положение
— получаются фигуры Лиссажу более
сложной формы. Фигуры Лиссажу вписываются
в прямоугольник, центр которого совпадает
с началом координат,
а стороны параллельны осям координат
и расположены по обе стороны от них на
расстояниях, равных амплитудам колебаний.
и
равенстве амплитуд превращаются в
окружность. Если периоды обоих колебаний
неточно совпадают, то разность фаз всё
время меняется, вследствие чего эллипс
всё время деформируется. При существенно
различных периодах фигуры Лиссажу не
наблюдаются. Однако, если периоды
относятся как целые числа, то через
промежуток времени, равный наименьшему
кратному обоих периодов, движущаяся
точка снова возвращается в то же положение
— получаются фигуры Лиссажу более
сложной формы. Фигуры Лиссажу вписываются
в прямоугольник, центр которого совпадает
с началом координат,
а стороны параллельны осям координат
и расположены по обе стороны от них на
расстояниях, равных амплитудам колебаний.
Математическое выражение для кривой Лиссажу
![]()
где A, B — амплитуды колебаний, a, b — частоты, δ — сдвиг фаз
Вид кривой сильно зависит от соотношения a/b. Когда соотношение равно 1, фигура Лиссажу имеет вид эллипса, при определённых условиях она имеет вид прямой (A = B, δ = π/2 радиан) и отрезка прямой (δ = 0). Ещё один пример фигуры Лиссажу — парабола (a/b = 2, δ = π/2). При других соотношениях фигуры Лиссажу представляют собой более сложные фигуры, которые являются замкнутыми при условии a/b — рациональное число.
Фигуры Лиссажу, где a = 1, b = N (N — натуральное число) и
![]()
24.
Затухающие
колебания
— колебания, энергия которых уменьшается
с течением времени. Бесконечно длящийся
процесс вида
![]() в
природе невозможен. Свободные колебания
любого осциллятора рано или поздно
затухают и прекращаются. Поэтому на
практике обычно имеют дело с затухающими
колебаниями. Они характеризуются тем,
что амплитуда колебаний A
является убывающей функцией. Обычно
затухание происходит под действием сил
сопротивления среды, наиболее часто
выражаемых линейной зависимостью от
скорости колебаний
в
природе невозможен. Свободные колебания
любого осциллятора рано или поздно
затухают и прекращаются. Поэтому на
практике обычно имеют дело с затухающими
колебаниями. Они характеризуются тем,
что амплитуда колебаний A
является убывающей функцией. Обычно
затухание происходит под действием сил
сопротивления среды, наиболее часто
выражаемых линейной зависимостью от
скорости колебаний
![]() или
её квадрата.
или
её квадрата.
В акустике: затухание — уменьшение уровня сигнала до полной неслышимости.
Коэффициент затухания
![]()
|
Обозначение |
Описание | ||||
|
|
| ||||
|
|
| ||||
|
|
|
Время релаксации - время, за которое амплитуда уменьшается в e раз.
![]()
Логарифмический декремент затухания
![]()
Добро́тность — характеристика колебательной системы, определяющая полосу резонанса и показывающая, во сколько раз запасы энергии в системе больше, чем потери энергии за один период колебаний.
Добротность обратно пропорциональна скорости затухания собственных колебаний в системе. То есть, чем выше добротность колебательной системы, тем меньше потери энергии за каждый период и тем медленнее затухают колебания.
Общая формула для добротности любой колебательной системы:
![]() ,
,
где:![]() —
резонансная частота колебаний
—
резонансная частота колебаний![]() —
энергия, запасённая в колебательной
системе
—
энергия, запасённая в колебательной
системе
![]() —
рассеиваемая
мощность.
—
рассеиваемая
мощность.
Например, в электрической резонансной цепи энергия рассеивается из-за конечного сопротивления цепи, в кварцевом кристалле затухание колебаний обусловлено внутренним трением в кристалле, в объемных электромагнитных резонаторах теряется в стенках резонатора, в его материале и в элементах связи, в оптических резонаторах — на зеркалах.
Для Колебательного контура в RLC цепях:
![]() ,
,
где
![]() ,
,
![]() и
и
![]() —
сопротивление,
индуктивность
и ёмкость
резонансной цепи, соответственно.
—
сопротивление,
индуктивность
и ёмкость
резонансной цепи, соответственно.
25. Вынужденные колебания — колебания, происходящие под воздействием внешних сил, меняющихся во времени.
Автоколебания отличаются от вынужденных колебаний тем, что последние вызваны периодическим внешним воздействием и происходят с частотой этого воздействия, в то время как возникновение автоколебаний и их частота определяются внутренними свойствами самой автоколебательной системы.
Наиболее
простой и содержательный пример
вынужденных колебаний можно получить
из рассмотрения гармонического
осциллятора
и вынуждающей силы, которая изменяется
по закону:
![]() .
.
Колебания, совершающиеся под воздействием внешней периодической силы, называются вынужденными. Внешняя сила совершает положительную работу и обеспечивает приток энергии к колебательной системе. Она не дает колебаниям затухать, несмотря на действие сил трения.
Если свободные колебания происходят на частоте ω0, которая определяется параметрами системы, то установившиеся вынужденные колебания всегда происходят на частоте ω внешней силы.
В начальный момент в колебательной системе возбуждаются оба процесса – вынужденные колебания на частоте ω и свободные колебания на собственной частоте ω0.
Но свободные колебания затухают из-за неизбежного наличия сил трения. Поэтому через некоторое время в колебательной системе остаются только стационарные колебания на частоте ω внешней вынуждающей силы. Внешняя
сила
![]() приложена
к свободному концу пружины. Она заставляет
свободный (левый на рис. 2.5.1) конец пружины
перемещаться по закону
приложена
к свободному концу пружины. Она заставляет
свободный (левый на рис. 2.5.1) конец пружины
перемещаться по закону
|
y = ym cos ωt. |
где ym – амплитуда колебаний, ω – круговая частота. Такой закон перемещения можно обеспечить с помощью шатунного механизма, не показанного на рис. 2.5.1.
Уравнению, выражающему второй закон Ньютона для тела на пружине при наличии внешнего периодического воздействия, можно придать строгую математическую форму, если учесть связь между ускорением тела и его
координатой:
![]() Тогда
уравнение
вынужденных колебанийзапишется
в виде
Тогда
уравнение
вынужденных колебанийзапишется
в виде
|
|
|
(**) |
где
![]() –
собственная круговая частота свободных
колебаний, ω – циклическая частота
вынуждающей силы. В случае вынужденных
колебаний груза на пружине (рис. 2.5.1)
величина A определяется выражением:
–
собственная круговая частота свободных
колебаний, ω – циклическая частота
вынуждающей силы. В случае вынужденных
колебаний груза на пружине (рис. 2.5.1)
величина A определяется выражением:
|
|
Зависимость амплитуды xm вынужденных колебаний от частоты ω вынуждающей силы называется резонансной характеристикой или резонансной кривой
Наиболее
известная большинству людей механическая
резонансная система — это обычные
качели.
Если вы будете подталкивать качели в
соответствии с их резонансной частотой,
размах движения будет увеличиваться,
в противном случае движения будут
затухать. Резонансную частоту такого
маятника с достаточной точностью в
диапазоне малых смещений от равновесного
состояния, можно найти по формуле:![]() ,где
g
это ускорение
свободного падения
(9,8 м/с² для поверхности Земли),
а L
— длина от точки подвешивания маятника
до центра его масс.
,где
g
это ускорение
свободного падения
(9,8 м/с² для поверхности Земли),
а L
— длина от точки подвешивания маятника
до центра его масс.
частота главного резонанса зависит от свойств струны и выражается следующим отношением:
![]() ,
,
где T — сила натяжения, ρ — масса единицы длины струны, а m — полная масса струны.Увеличение натяжения струны и уменьшение её массы (толщины) и длины увеличивает её резонансную частоту
26. Волна - это возмущение, распространяющееся с конечной скоростью в пространстве и несущее с собой энергию. Суть волнового движения состоит в переносе энергии без переноса вещества. По взаимоположению вектора возмущения и вектора скорости волны, волны подразделяются на продольные (направление вектора возмущения совпадает с направлением вектора скорости) и поперечные (вектор возмущения перпендикулярен вектору скорости).Уравнение плоской незатухающей бегущей волны. Бегущими называются волны которые переносят в пространстве энергию.S=So Sin(Wot-kt) – уравнение плоской бегущей волны
Уравнение плоской волны, распространяющейся вдоль положительного направления оси х
![]()
![]()
![]()
(S(x, t) — смещение точек среды с координатой х в момент времени /; А — амплитуда волны; ω— циклическая (круговая) частота; k — волновое число; λ—длина волны; v — фазовая скорость; Т— период колебаний; φ0 — начальная фаза колебаний)Упру́гие во́лны (звуковые волны) — волны, распространяющиеся в жидких, твёрдых и газообразных средах за счёт действия упругих сил.Энергия упругой волны. Найдем полную механическую энергию (5.8.2) для выделенного нами элемента упругой среды, в которой распространяются упругая продольная волна:
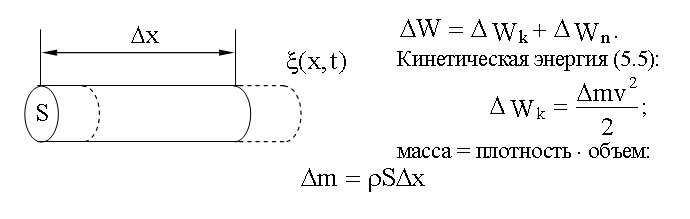 Потенциальная
энергия упругого деформированного
стержня:
Потенциальная
энергия упругого деформированного
стержня:
![]() .Полная
энергия выделенного элемента
объемом SΔx будет
равна
.Полная
энергия выделенного элемента
объемом SΔx будет
равна![]() Плотность
энергии упругой волны
Плотность
энергии упругой волны
![]() .
.
Вектор плотности потока энергии (вектор Умова)
Характеризуется переносом энергии в волнах , совпадает по направлению с направлением скорости распространения волн и равен произведению обьемной плотности энергии на вектор скорости распространения волны.Вектор Умова можно определить через вектороное произведение двух векторов:
![]() ,где E и H —
векторы напряжённости электрического и магнитного полей
соответствен
,где E и H —
векторы напряжённости электрического и магнитного полей
соответствен
27. Сложение (Интерференция) волн — взаимное увеличение или уменьшениерезультирующей амплитуды двух или нескольких когерентных волн, одновременно распространяющихся в пространстве.[1] Сопровождается чередованием максимумов и минимумов (пучностей) интенсивности в пространстве. Результат интерференции (интерференционная кар
Стоя́чая волна́ — колебания в распределённых колебательных системах с характерным расположением чередующихся максимумов (пучностей) и минимумов (узлов) амплитуды. Практически такая волна возникает приотражениях от преград и неоднородностей в результате наложения отражённой волны на падающую. При этом крайне важное значение имеет частота, фаза и коэффициент затухания волны в месте отражения.
Примерами стоячей волны могут служить колебания струны, колебания воздуха в органной трубе[1]; в природе —волны Шумана.
Чисто стоячая волна, строго говоря, может существовать только при отсутствии потерь в среде[2] и полном отражении волн от границы. Обычно, кроме стоячих волн, в среде присутствуют и бегущие волны, подводящие энергию к местам её поглощения или излучения.
Для демонстрации стоячих волн в газеиспользуют трубу Рубенса.тина) зависит от разности фаз накладывающихся волн
28. Термодинамическая система — это любая область пространства, ограниченная действительными или воображаемыми границами, выбранными для анализа её внутренних термодинамических параметров.
Пространство, смежное с границей системы, называется внешней средой. У всех термодинамических систем есть среда, с которой может происходить обмен энергии и вещества.Границы термодинамической системы могут быть неподвижными или
подвижными.Системы могут быть большими или маленькими, в зависимости от границ.Система может существовать в вакууме или может содержать несколько фаз одного или более веществ. Термодинамические системы могут содержать сухой воздух и водяной пар (два вещества) или воду и водяной пар (две стадии одного и того же вещества). Однородная система состоит из одного вещества, одной его фазы или однородной смеси нескольких компонентов.Системы бывают изолированными (замкнутыми) или открытыми. В изолированной системе не происходит никаких обменных процессов с внешней средой. В открытой системе и энергия и вещество могут переходить из системы в среду и обратно.Состояние термодинамической системы определяется физическими свойствами вещества. Температура, давление, объем, внутренняя энергия, энтальпия и энтропия — это термодинамические величины, определяющие те или иные интегральные параметры системы. Данные параметры строго определяются лишь для систем, находящихся в состоянии термодинамического равновесия.Различают экстенсивные параметры состояния,пропорциональные массе термодинамической системы, и интенсивные параметры состояния, не зависящие от массы системы. К экстенсивным параметрам состояния. относятся: объём, Внутренняя энергия, Энтропия, Энтальпия, изохорно-изотермический потенциал Гиббсова энергия), изобарно-изометрический потенциал (Гельмгольцева энергия); к интенсивным параметрам состояния— давление, температура, концентрация, магнитная индукция и др. параметры состояния взаимосвязаны, так что равновесное состояние системы можно однозначно определить, установив значения ограниченного числа параметров состояния.В молекулярно-кинетической теории поль зуются идеализированной моделью идеаль ного газа, согласно которой:1) собственный объем молекул газа пренебрежимо мал по сравнению с объемом сосуда;2) между молекулами газа отсутству ют силы взаимодействия;
3) столкновения молекул газа между собой и со стенками сосуда абсолютно упругие.Модель идеального газа можно ис пользовать при изучении реальных газов, так как они в условиях, близких к нормальным (например, кислород гелий),
29. Закон равномерного распределения энергии по степеням свободы молекул. Основное уравнение молекулярно-кинетической теории газов.Число степеней свободы – это число независимых величин с помощью которых может быть задано положение системы. (1 атом =3 ст., 2 атома =5ст. 3 атома=6ст.)Закон Больцмана о равномерном распределении энергии по степеням свободы молекул: для статической системы, находящейся в состоянии термодинамического равновесия, на каждую поступательную и вращательную степени свободы приходится в среднем кинетическая энергия, равная КТ/2 , а на каждую колебательную – КТ
средняя энергия приходящаяся на одну степень свободы:
![]() У
одноатомной молекулы i = 3, тогда для
одноатомных молекул:
У
одноатомной молекулы i = 3, тогда для
одноатомных молекул:
![]() для
двухатомных молекул:
для
двухатомных молекул:![]()
Таким
образом, на среднюю кинетическую энергию
молекулы, имеющей i-степеней свободы,
приходится:![]()
Молекулярно-кинетическая теория (сокращённо МКТ) — теория, рассматривающая строение вещества с точки зрения трёх основных приближенно верных положений:
1) все тела состоят из частиц, размером которых можно пренебречь: атомов, молекул и ионов;
2) частицы находятся в непрерывном хаотическом движении (тепловом);
3) частицы взаимодействуют друг с другом путём абсолютно упругих столкновений.Основное уравнение молекулярно-кинетической теории идеального газа:Уравнение, связывающее макроскопическую величину – давление с микроскопическими величинами, характеризующими молекулы.
![]() p
– давление газа, n - концентрация молекул,
m0
- масса молекулы.
p
– давление газа, n - концентрация молекул,
m0
- масса молекулы.
30. Уравнение состояния идеального газа (иногда уравнение Клапейрона или уравнение Менделеева — Клапейрона) — формула, устанавливающая зависимость между давлением, молярным объёмом и абсолютной температурой идеального газа. Уравнение имеет вид:
![]()
где
![]() — давление,
— давление,
![]() — молярный
объём,
— молярный
объём,
![]() — универсальная
газовая постоянная
— универсальная
газовая постоянная
![]() — абсолютная
температура,К.
— абсолютная
температура,К.
31.Барометрическая
формула —
зависимость давления или плотности
газа от высоты в поле тяжести.Для идеального
газа,
имеющего постоянную температуру ![]() и
находящегося в однородном поле тяжести
(во всех точках его объёма ускорение
свободного падения
и
находящегося в однородном поле тяжести
(во всех точках его объёма ускорение
свободного падения ![]() одинаково),
барометрическая формула имеет следующий
вид:
одинаково),
барометрическая формула имеет следующий
вид:
![]()
распределением Больцмана
![]() (5)
Выражение
(5) называется распределением
Больцмана для
внешнего потенциального поля. Из него
видно, что при постоянной температуре
плотность газа больше там, где меньше
потенциальная энергия его молекул.
(5)
Выражение
(5) называется распределением
Больцмана для
внешнего потенциального поля. Из него
видно, что при постоянной температуре
плотность газа больше там, где меньше
потенциальная энергия его молекул.
Закон распределения молекул идеального газа по скоростям, теоретически полученный Максвеллом в 1860 г. определяет, какое число dN молекул однородного (p = const) одноатомного идеального газа из общего числа N его молекул в единице объёма имеет при данной температуре Т скорости, заключенные в интервале от v до v + dv.
Для вывода функции распределения молекул по скоростям f(v) равной отношению числа молекул dN, скорости которых лежат в интервале v ÷ v + dv к общему числу молекул N и величине интервала dv
![]()
32.Средний
путь, проходимый молекулой за единицу
времени, численно равен ![]() .
Поэтому средняя длина свободного пробега
равна
.
Поэтому средняя длина свободного пробега
равна ![]() .
Для определения
.
Для определения ![]() вычислим
сначала среднее число соударений
вычислим
сначала среднее число соударений ![]() выбранной
молекулы с другими молекулами за единицу
времени. Будем считать, что молекула
после соударения продолжает двигаться
по прямой со средней скоростью движения
выбранной
молекулы с другими молекулами за единицу
времени. Будем считать, что молекула
после соударения продолжает двигаться
по прямой со средней скоростью движения ![]() .
.
![]()
Это
число ![]() и
определяет среднее число соударений
за единицу времени.
и
определяет среднее число соударений
за единицу времени.
33.Явления (процессы), возникающие в газах при отклонении их от равновесия, называются явлениями переноса
Процесс установления внутри фаз равновесного распределения концентрации газовых молекул (а также молекул жидких и твёрдых тел) называется диффузией.
Процесс направленного переноса внутренней энергии (выравнивание температуры) называется теплопроводностью.
Процесс направленного переноса количества движения (связано с возникновением сил трения между слоями) называется внутренним трением.(Вязкостью)
34.Термодинамические процессы
Любое состояние равновесия рабочего тела можно охарактеризовать его параметрами. Если в результате взаимодействия с окружающей средой хотя бы один из параметров изменяется, то происходит термодинамический процесс. Ранее было дано определение равновесного процесса, т.е. такого идеального процесса, когда в любой момент времени система находится в равновесии с окружающей средой.
Работа![]() , Дж.
, Дж.
Теплота
![]()
Виды теплоемкостей
Удельная теплоёмкость
Теплоёмкость для различных состояний вещества
35.Политропным процессом называется процесс, все состояния которого удовлетворяются условию:
P· n = Const, (4.24)
где n – показатель политропы, постоянная для данного процесса.
при n = ± = Const, (изохорный), n = 0 P = Const, (изобарный), n = 1 T = Const, (изотермический), n = P· = Const, (адиабатный).