

МУ к лабораторной работе (ТЭП) № 2_1
.pdfДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
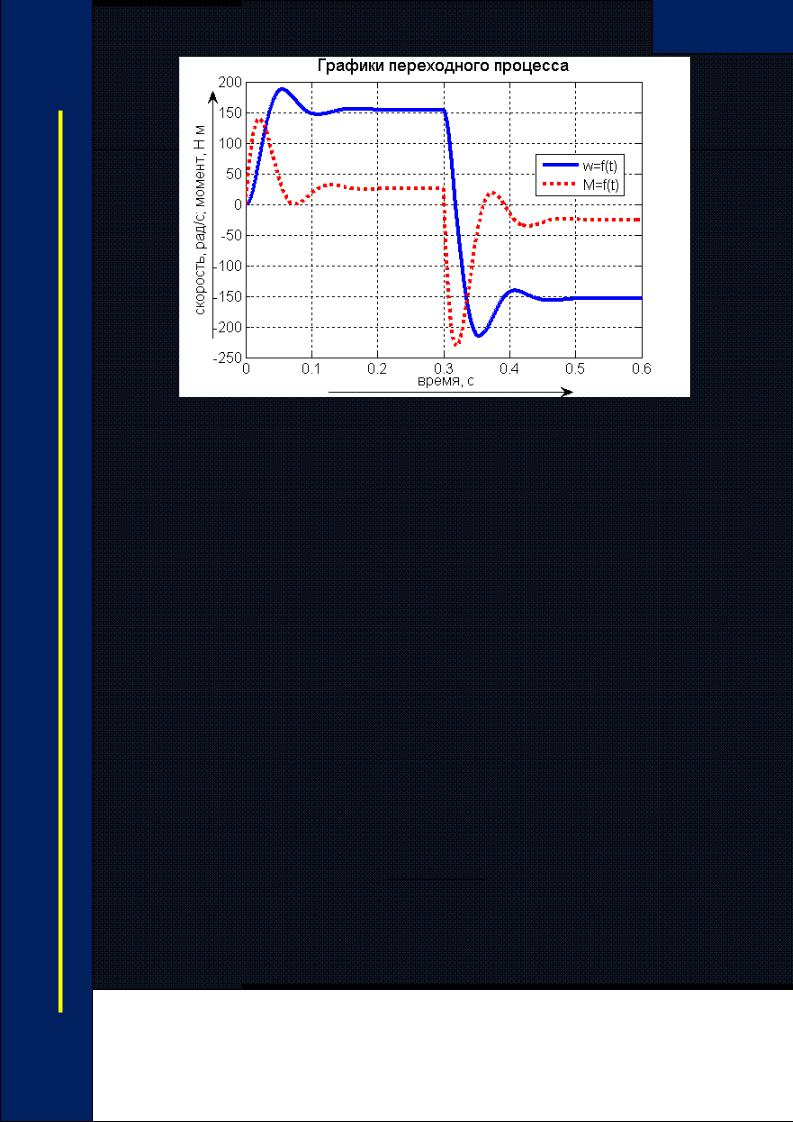
Рисунок 7 – Переходной процесс угловой скорости и момента ДПТ с НВ
3.4 Пуск и реверс ДПТ с НВ (нагрузка реактивная)
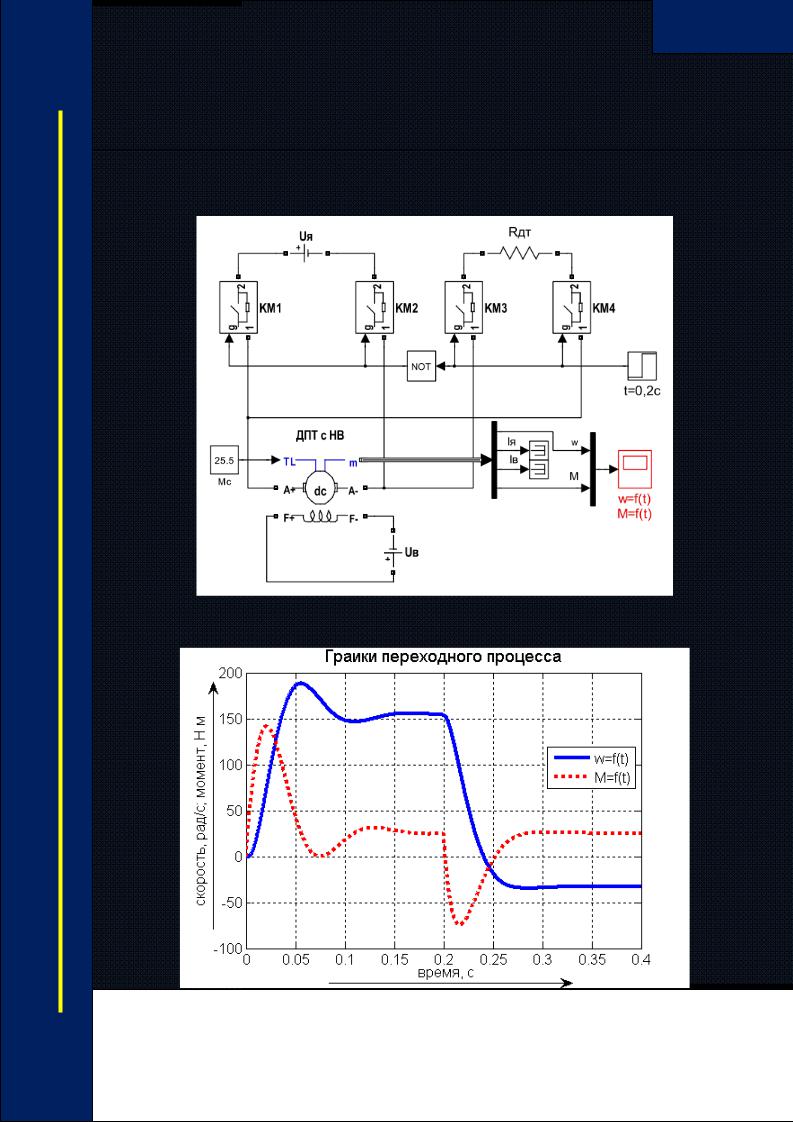
Рисунок 8 – Модель для исследования пуска и реверса ДПТ с НВ
ДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
Рисунок 9 – Переходной процесс угловой скорости и момента ДПТ с НВ
3.5 Пуск и динамическое торможение ДПТ с НВ (нагрузка активная)
Динамическое торможение ДПТ с НВ осуществляется отклю- чением якорной цепи двигателя от источника и замыканием ее на сопротивление, при этом, обмотка возбуждения остается подклю- ченной к источнику. Сопротивление, на которое замыкается якорная цепь, носит название сопротивление динамического тор- можения. От величины сопротивления динамического торможе- ния зависит интенсивность торможения двигателя: чем меньше сопротивление динамического торможения, тем интенсивнее за- тормозится двигатель, однако при этом возможны большие (недо- пустимые) броски тока якоря. Поэтому сопротивление динамиче- ского торможения рассчитывают исходя из ограничения тока якоря в переходном режиме торможения по формуле:
R к Фном нач R ,
ДТ IЯдоп Я
где кФном - номинальный коэффициент ЭДС и момента ДПТ;
RЯ - сопротивление якоря, приведенное к рабочей температу- ре двигателя;
IЯдоп - допустимое значение тока якоря при торможении;нач - начальная скорость торможения.
ДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
Начальная скорость торможения может быть определена из выражения естественной механической характеристики, при под- становке в него вместо момента двигателя момента нагрузки, с которым работает двигатель на естественной характеристике:
|
|
UЯном |
|
R Я |
М |
|
. |
|
(к Фном)2 |
|
|||||
нач |
|
к Фном |
|
С |
|
||
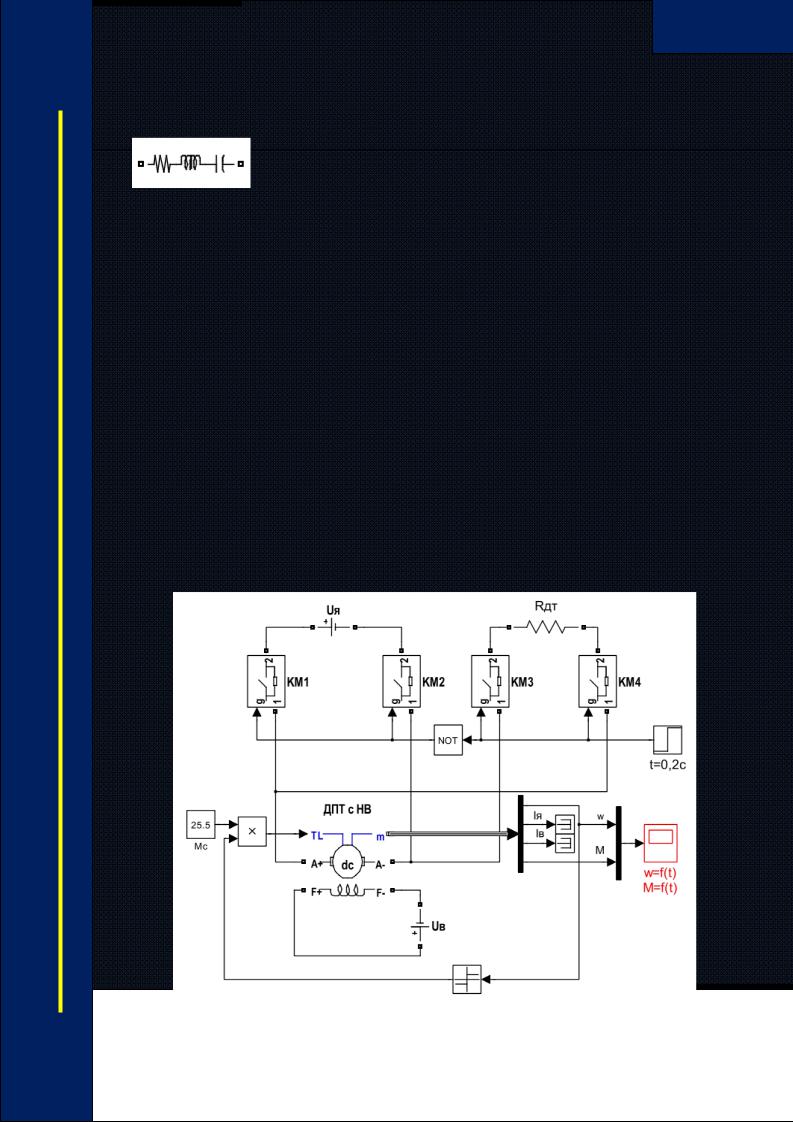
Рисунок 10 – Модель для исследования пуска и реверса ДПТ с НВ
Рисунок 11 – Переходной процесс угловой скорости и момента ДПТ с НВ
ДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
Таблица 4 – Блоки для SPS-модели привода постоянного тока с ДПТ НВ
|
Пиктограмма |
Назначение |
Параметры блока |
|
Series RLC Branch |
Моделирует по |
Resistance R (Ohms): [Сопротивление (Ом)] Вели |
||
|
|
|
следовательное |
чина активного сопротивления. Для исключения |
|
|
|
резистора из цепи значение сопротивления нуж |
|
|
|
|
включение рези |
но задать равным нулю. На пиктограмме блока |
|
|
|
стора, индуктивно |
резистор отображаться не будет. |
|
|
|
||
|
|
|
сти и конденсатора. |
Inductance L (H): [Индуктивность (Гн)] Величина |
Последовательная |
индуктивности. Для исключения индуктивности |
|||
|
RLC цепь |
|
из цепи ее величину нужно задать равным нулю. |
|
|
|
На пиктограмме блока индуктивность отобра |
||
библиотекаElements |
|
жаться не будет. |
||
|
Capacitance C (F): [Емкость (Ф)] Величина емко |
|||
(электротехнические |
|
сти. Для исключения конденсатора из цепи зна |
||
|
элементы) |
|
чение емкости нужно задать равной inf (беско |
|
|
|
|
|
нечность). Конденсатор на пиктограмме блока |
|
|
|
|
показан не будет. |
|
|
|
|
Measurements: [Измеряемые переменные] Па |
|
|
|
|
раметр позволяет выбрать, передаваемые в |
|
|
|
|
блок Multimeter, переменные, которые затем |
|
|
|
|
можно увидеть с помощью блока Scope. Значе |
|
|
|
|
ния параметра выбираются из списка: |
|
|
|
|
None нет переменных для отображения, |
|
|
|
|
Branch voltage Voltage напряжение на зажи |
|
|
|
|
мах цепи, |
|
|
|
|
Branch current ток цепи, |
|
|
|
|
Branch voltage and current напряжениеиток |
3.6 Пуск и динамическое торможение ДПТ с НВ
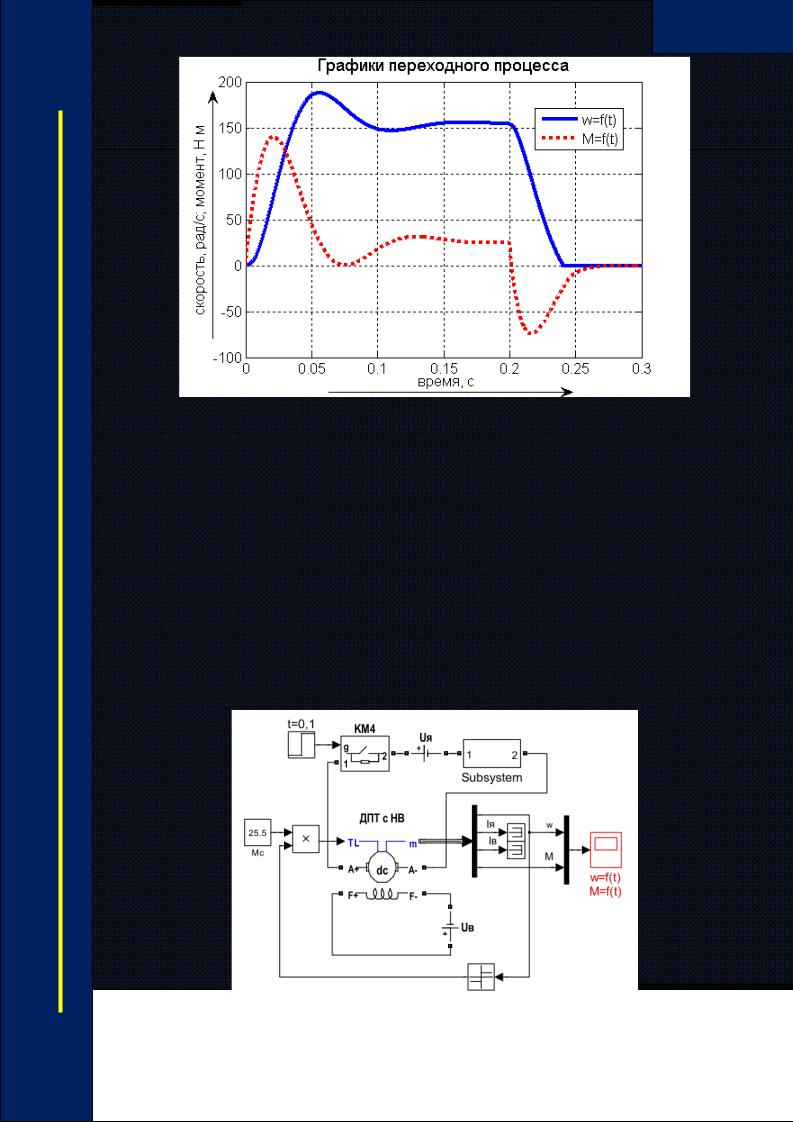
Рисунок 12 – Модель для исследования пуска и реверса ДПТ с НВ
ДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
Рисунок 13 – Переходной процесс угловой скорости и момента ДПТ с НВ
3.7 Реостатный пуск ДПТ с НВ в три ступени пускового реостата
При прямом пуске броски тока якоря могут превысить допу- стимые значения по условиям коммутации на коллекторе маши- ны. Кроме того, рабочие органы многих производственных меха- низмов требуют осуществления пуска с заданной интенсивностью. В таких случаях для пуска двигателей используют дополнительные резисторы, включенные в якорную цепь двигателя, которые по мере разгона двигателя выводятся (шунтируются коммутационной аппаратурой) и двигатель в конце пуска переходит на естествен- ную характеристику.
Рисунок 14 – Модель для исследования реостатного пуска ДПТ с НВ

ДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
Рисунок 15 – Модель пускового реостата (три ступени)
Рисунок 16 – Переходные процессы без учета электромагнитной инерции
Рисунок 17 – Переходные процессы с учетом электромагнитной инерции
Для ДПТ с НВ пусковые сопротивления могут быть рассчита- ны графическим и аналитическим способами. Аналитический спо-

ДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
соб расчета пускового реостата дает более точные результаты рас- чета.
Аналитический расчет пускового реостата проводят в следую- щей последовательности:
1)Задаются числом ступеней пускового реостата n (например, n = 3).
2)Задаются моментом переключения, превышающим зна- чение момента статического при пуске на 10-20 % (М2 =
[1,1…1,2] МС).
3) Определяют относительное значение переключающего момента М2:
М* М2 .
2 Мном
4)Определяют относительное сопротивление якоря двига-
теля:
r |
* |
|
R Я |
|
R Я |
|
|
|
|
. |
|||
|
R ном |
UЯном IЯном |
||||
5)Определяют :
(n 1) |
1 |
. |
|
r* М*2 |
|||
|
|
6)Определяют значение пикового момента:
М1* М*2 , |
М1 М2 . |
7) Сравнивают значение пикового момента М1 с допусти- мым моментом: (если пиковый момент получился больше чем до- пустимый момент по условиям пуска, то необходимо увеличить число пусковых ступеней n). Если М1 не превышает допустимого момента двигателя, то переходят к расчету сопротивлений пуско- вого реостата.
8) Определяют сопротивления ступеней пускового реоста- та, например, для n = 3:
R3 R Я 1 R2 R3
R1 R2
ДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
Полное сопротивление якорной цепи, соответствующее работе двигателя на i-той реостатной характеристике определяется по выражению:
R Яi R Я n 1 i ,
так для n = 3 полные сопротивления для каждой ступени мож- но определить по формулам:
R Я1 R Я 3
R Я2 R Я 2
R Я3 R Я
9) Затем можно определить время работы на i -той рео- статной характеристике по формуле:
ti TMi ln М1 МС ,
М2 МС
где |
ТМi - электромеханическая постоянная времени, со- |
||||||
|
ответствующая работе |
двигателя на i-той реостатной |
|||||
|
характеристике: |
|
|
|
|
|
|
|
T |
|
J |
|
|
J R Яi |
. |
|
|
к Фном 2 |
|||||
|
Mi |
|
i |
|
|||

ДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
ПаспортныеданныеДПТсНВ:
вар. |
Тип |
Р2номк |
Uя, |
Uв, |
nном, |
КПД |
Iя, |
Iв, |
Rя+Rдп |
Rв, |
Lя, |
Lв, |
J, |
|
двигате- |
Вт |
В |
В |
об/мин |
% |
А |
А |
Ом |
Ом |
мГн |
Гн |
кг*м2 |
||
№ |
||||||||||||||
|
ля |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2ПН90М |
1 |
220 |
110 |
3000 |
72,5 |
5,27 |
1 |
4,788 |
110,4 |
48 |
11,2 |
0,004 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
2ПН100М |
2 |
220 |
220 |
3000 |
79 |
10,8 |
0,7 |
1,65 |
318 |
26 |
45,1 |
0,011 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
2ПН132М |
4 |
220 |
220 |
1500 |
79 |
21,6 |
1,37 |
1,08 |
160,8 |
11 |
18,4 |
0,038 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
2ПН132L |
3 |
220 |
110 |
1000 |
75,5 |
15,6 |
2,44 |
1,824 |
45 |
18,1 |
5,5 |
0,048 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
2ПФ132М |
4 |
440 |
220 |
1500 |
82,5 |
9,37 |
1,65 |
3,92 |
133,2 |
38,6 |
13,2 |
0,038 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
2ПН160М |
13 |
220 |
220 |
2120 |
85,5 |
66,13 |
2,98 |
0,164 |
73,8 |
2,2 |
9,6 |
0,083 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
2ПН160L |
11 |
440 |
220 |
1600 |
85,5 |
26,44 |
2,8 |
0,899 |
78,36 |
12,5 |
8,5 |
0,1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
2ПО160М |
6 |
220 |
220 |
1600 |
84,5 |
31 |
1,24 |
0,463 |
177,6 |
7,1 |
24,6 |
0,083 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9 |
2ПО160L |
10 |
440 |
220 |
2120 |
88,5 |
24,11 |
1,57 |
0,666 |
140,4 |
12 |
18,4 |
0,1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
2ПФ160М |
16 |
220 |
220 |
3150 |
87 |
80,15 |
3,45 |
0,0732 |
63,72 |
0,99 |
11,3 |
0,083 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11 |
2ПФ180М |
15 |
220 |
220 |
1500 |
85,5 |
76,01 |
3,73 |
0,168 |
59,04 |
2,7 |
9,4 |
0,2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
2ПФ180L |
25 |
440 |
220 |
2200 |
89,5 |
59,5 |
3,99 |
0,264 |
55,2 |
4,4 |
7,4 |
0,23 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
13 |
2ПН200М |
60 |
440 |
220 |
3150 |
90,5 |
145,4 |
5,24 |
0,0912 |
42 |
1,6 |
6,1 |
0,25 |
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
14 |
2ПФ200М |
22 |
220 |
220 |
1600 |
87,5 |
110,3 |
3,99 |
0,0912 |
55,2 |
1,6 |
10,6 |
0,25 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
15 |
2ПФ200L |
30 |
220 |
220 |
1500 |
88,5 |
148,3 |
5,78 |
0,0612 |
38,04 |
1,2 |
9,3 |
0,3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Примечания:
Сопротивления обмотки якоря, обмотки дополнительных полюсов и об- мотки возбуждения приведены для нагретого состояния машины.
Для обмотки возбуждения приведено среднее значение индуктивности.
Момент инерции механизма, приведенный к валу двигателя принять равным 50 % от момента инерции якоря двигателя.
ДПТ с высотами оси вращения до 100 мм - двухполюсные, с высотами более 100 мм – четырехполюсные.