

МУ к лабораторной работе (ТЭП) № 2_1
.pdfДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
|
|
Пиктограмма |
Назначение |
Параметры блока |
||||
библиотекаExtra Library |
(При установке блока |
|
||||||
|
Measurements (изме |
внутри подсистемы на |
|
|||||
|
рительныеиконтроль |
пиктограмме появляется |
|
|||||
|
порт, аналогичный пор |
|
||||||
|
|
ныеустройства) |
там стандартных блоков |
|
||||
|
|
|
|
|
|
|
SimPowerSystems.) |
|
|
|
Three Phase |
Моделирует трех |
Resistance R (Ohms): [Сопротивление (Ом)] Вели |
||||
|
Series RLC Branch |
фазную цепь, со |
чина активного сопротивления в одной фазе. |
|||||
|
|
|
|
|
|
|
стоящую из трех |
Для исключения резистора из цепи значение со |
|
|
|
|
|
|
|
противления нужно задать равным нулю. В |
|
|
|
|
|
|
|
|
RLC цепей. |
этом случае на пиктограмме блока резистор |
|
|
|
|
|
|
|
(Трехфазная цепь – сим |
отображаться не будет. |
|
|
|
|
|
|
|
Inductance L (H): [Индуктивность (Гн)] Величина |
|
|
|
|
|
|
|
|
метричная, значения ак |
индуктивности в одной фазе. Для исключения |
|
Трехфазная после |
|||||||
|
тивного сопротивления, |
индуктивности из цепи ее величину нужно за |
||||||
|
довательная RLC |
индуктивного и емкост |
дать равным нулю. В этом случае на пикто |
|||||
|
|
|
цепь |
ного задаются одновре |
грамме блока индуктивность отображаться не |
|||
|
|
|
|
|
|
|
менно для трех фаз.) |
будет. |
|
библиотекаElements |
|
||||||
|
|
Capacitance C (F): [Емкость (Ф)] Величина емко |
||||||
|
(электротехнические |
|
сти в одной фазе. Для исключения конденсатора |
|||||
|
|
элементы) |
|
из цепи значение емкости нужно задать равной |
||||
|
|
|
inf (бесконечность). В этом случае конденсатор |
|||||
|
|
|
|
|
|
|
|
на пиктограмме блока показан не будет. |
Current Measurement |
Выполняет изме |
Output signal: [Выходной сигнал] - Вид вы- |
||||||
|
|
|
|
|
|
|
рение мгновенного |
ходного сигнала блока. Выбор значения пара- |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
значения тока, про |
метра возможен только, если с помощью |
|
|
|
|
|
|
|
блока Powergui установлен режим расчета |
|
|
|
|
|
|
|
|
текающего через |
на переменном токе (Phasor simulation). В |
|
|
Измеритель |
||||||
|
|
соединительную |
этом случае значение параметра выбирается |
|||||
|
|
|
тока |
линию (провод). |
из списка: |
|||
|
|
библиотека |
(Выходным сигналом |
Magnitude Амплитуда (скалярный сигнал). |
||||
|
|
Complex Комплексный сигнал. |
||||||
|
Measurements (измери |
|||||||
|
блока является обычный |
Real Imag Вектор, состоящий из двух элемен |
||||||
|
тельныеиконтрольные |
сигнал Simulink, который |
тов действительная и мнимая составляющие |
|||||
|
|
устройства) |
может использоваться |
сигнала. |
||||
|
|
|
|
|
|
|
любым Simulink |
Magnitude Angle Вектор, состоящий из двух |
|
|
|
|
|
|
|
блоком.) |
элементов амплитуда и аргумент сигнала. |
|
|
|
RMS |
Выполняет вычис |
Fundamental frequency (Hz): [Базовая часто- |
|||
|
|
|
|
|
|
|
ление действующе |
та (Гц)]. |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
го за период зна |
|
|
|
|
|
чения входного пе |
|
|||
|
|
Действующее |
|
|
||||
|
|
значение |
ременного сигнала. |
|
||||
|
|
(Входным и выходным |
|
|||||
библиотекаExtra Library |
|
|||||||
сигналами блока явля |
|
|||||||
|
/ Measurements (до |
ются обычные сигналы |
|
|||||
|
полнительныеэлектро |
Simulink.) |
|
|||||
|
техническиеустройства |
|
|
|||||
|
|
/ измерительные |
|
|
||||
|
|
устройства) |
|
|
||||
ДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
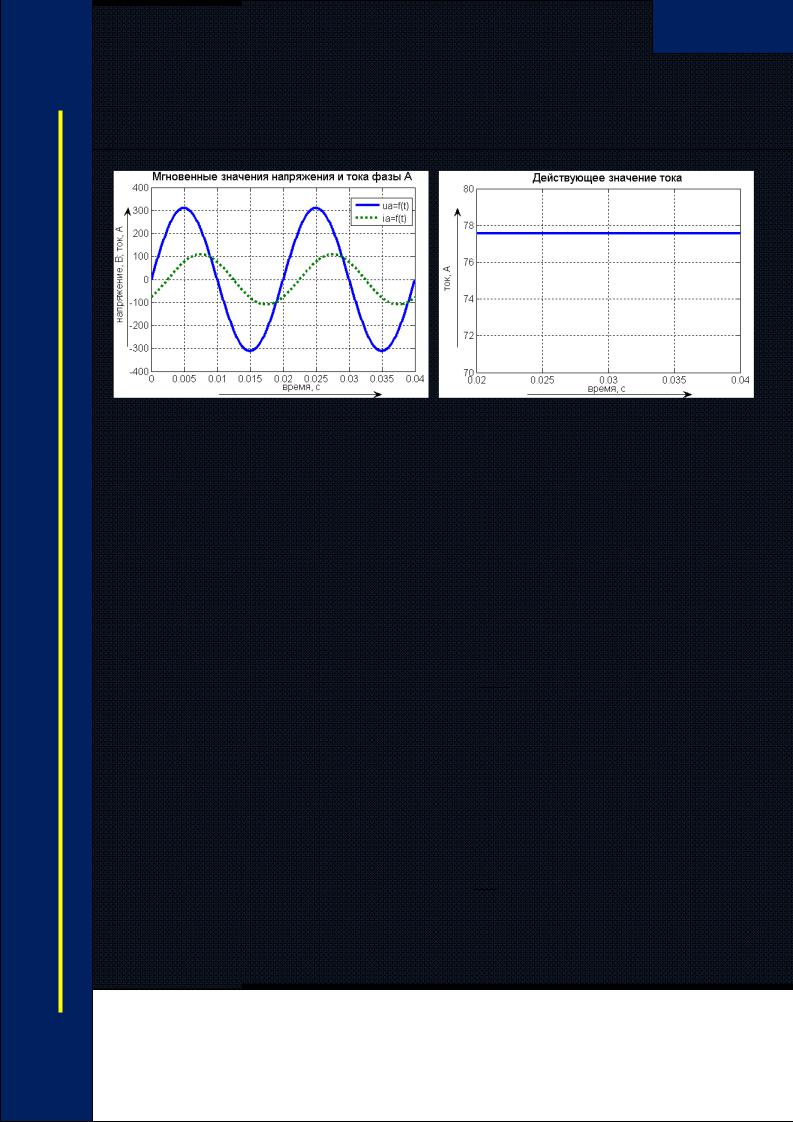
На рисунке 3 – а) приведены графики мгновенных значений напряжения фазы А и тока нагрузки в фазе А, на рисунке 3 – б) приведен график действующего значения тока нагрузки в фазе А, вычисленного с помощью блока RMS.
а) |
б) |
Рисунок 3 – Графики изменения во времени напряжения и тока фазы А
3.2 Пуск, наброс, сброс нагрузки ДПТ с НВ
Двигатель постоянного тока с независимым возбуждением (без учета реакции якоря и влияния действия вихревых токов) при од- номассовой расчетной схеме описывается следующей системой дифференциальных уравнений:
u Я iЯ R Я LЯ didtЯ e u В iВ R В LВ didtВ
e к Ф
Мк Ф iЯ
ММС J ddt
Фf (iВ)
где RЯ - сопротивление якорной цепи, Ом; LЯ - индуктивность якорной цепи, Гн;
ДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
RВ - сопротивление обмотки возбуждения, Ом;
LВ - индуктивность обмотки возбуждения, Гн; К - конструктивный коэффициент двигателя; Ф - полезный поток одного полюса, Вб;
J - момент инерции суммарный, приведенный к валу двига- теля, кг*м2;
М - электромагнитный момент двигателя, Н*м.
МС - момент нагрузки, приведенный к валу двигателя, Н*м.
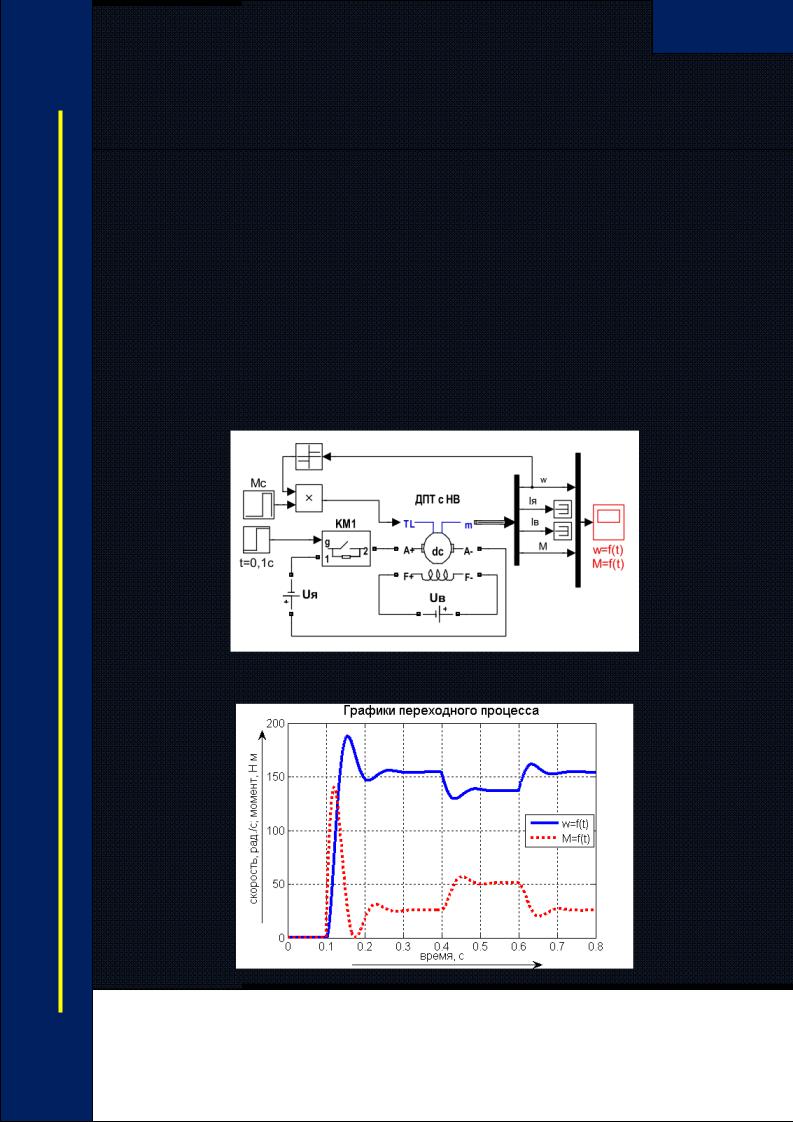
На рисунке 4 приведена SPS-модель привода постоянного то- ка, позволяющая моделировать переходные процессы пуска, наброса-сброса нагрузки при питании ДПТ с НВ от сети постоян- ного тока бесконечной мощности.
Рисунок 4 – Модель привода постоянного тока с ДПТ
Рисунок 5 – Переходной процесс угловой скорости и момента ДПТ
ДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
Таблица 3 – Блоки для SPS-модели привода постоянного тока с ДПТ НВ
Пиктограмма |
Назначение |
Параметры блока |
|||||
|
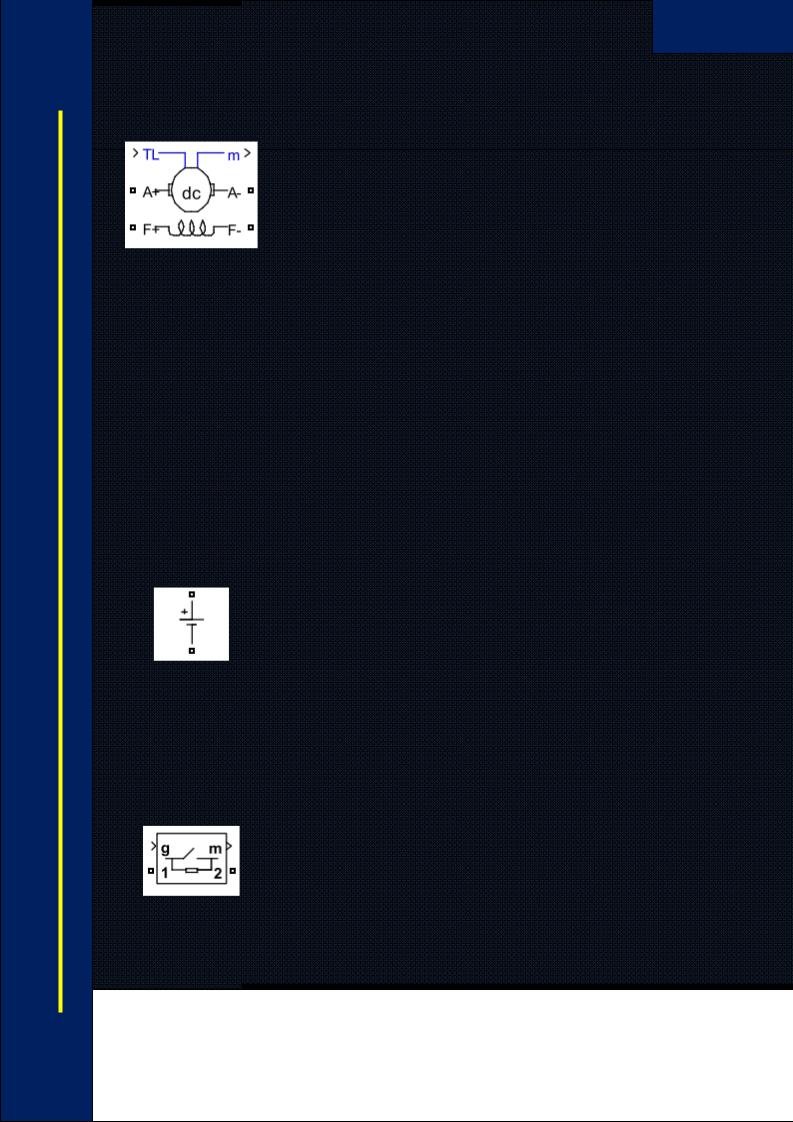
DC Machine |
Моделирует элек |
Preset model: [Выбор модели] – Позволяет вы |
||||
|
|
|
|
|
трическую машину |
брать модель машины из каталога. |
|
|
|
|
|
|
постоянного тока |
Mechanical input: [Механический вход] - |
|
|
|
|
|
|
Значение параметра выбирается из списка: |
||
|
|
|
|
|
(Порты модели A+ и A |
Torque TL – Момент сопротивления М. |
|
|
|
|
|
|
являются выводами об |
Speed w – Скорость w. |
|
|
|
|
|
|
мотки якоря машины, а |
Show detailed parameters: [Показать параметры |
|
|
|
Машина |
порты F+ и F представ |
модели] – При установленном флажке парамет |
|||
|
|
ляют собой выводы об |
ры модели доступны для изменения. |
||||
постоянного тока |
мотки возбуждения. |
Armature resistance and inductance [Ra (ohms) La |
|||||
библиотекаMachines |
Порт TL предназначен |
(H) ]: [Активное сопротивление Rя (Ом) и индук |
|||||
для подачи момента со |
тивность Lя (Гн) цепи якоря]. |
||||||
|
(электрические |
противления движению. |
Field resistance and inductance [Rf (ohms) Lf (H)]: |
||||
|
|
машины) |
На выходном поту m |
[Активное сопротивление Rв (Ом) и индуктивность |
|||
|
|
|
|
|
формируется векторный |
Lв (Гн) цепи возбуждения]. |
|
|
|
|
|
|
сигнал, состоящий из |
Field armature mutual inductance Laf (H): [Взаим |
|
|
|
|
|
|
четырех элементов: ско |
ная индуктивность между цепью якоря и цепью |
|
|
|
|
|
|
рости, тока якоря, тока |
возбуждения двигателя Lяв (Гн)]. |
|
|
|
|
|
|
возбуждения и электро |
Total inertia J (kg.m^2): [Момент инерции двигате |
|
|
|
|
|
|
магнитного момента |
ля J (кг*м^2)]. |
|
|
|
|
|
|
машины.) |
Viscous friction coefficient Bm (N.m.s): [Коэффици |
|
|
|
|
|
|
|
ент вязкого трения Мв (Н*м*с)]. |
|
|
|
|
|
|
|
Coulomb friction torque Tf (N.m): [Реактивный мо |
|
|
|
|
|
|
|
мент сопротивления Мf (Н*м)]. |
|
|
|
|
|
|
|
Initial speed (rad/s): [Начальная угловая скорость |
|
|
|
|
|
|
|
вала двигателя (рад/с)]. |
|
DC Voltage Source |
Вырабатывает по |
Amplitude (V):[Амплитуда (В)] Задает величину |
|||||
|
|
|
|
|
стоянное по уров |
выходного напряжения источника. |
|
|
|
|
|
|
|||
|
|
|
|
|
ню напряжение |
Measurements:[Измеряемые переменные] Па |
|
|
|
|
|
|
раметр позволяет выбрать, передаваемые в |
||
|
|
|
|
|
(Блок является идеаль |
блок Multimeter, переменные, которые затем |
|
|
|
|
|
|
ным источником напря |
можно увидеть с помощью блока Scope. Значе |
|
Идеальный источ |
|||||||
жения, т.е. его собствен |
ния параметра выбираются из списка: |
||||||
ник постоянного |
ное сопротивление рав |
None нет переменных для отображения, |
|||||
напряжения |
но нулю.) |
Voltage выходное напряжение источника. |
|||||
|
|||||||
библиотекаElectrical |
|
|
|||||
Sources (источники |
|
|
|||||
электрическойэнергии) |
|
|
|||||
|
Ideal Switch |
Моделирует иде |
Resistance Ron (Ohm): [Сопротивление во вклю |
||||
|
|
|
|
|
альный ключ |
ченном состоянии (Ом)], |
|
|
|
|
|
|
|||
|
|
|
|
|
Initial state: [Начальное состояние] Параметр |
||
|
|
|
|
|
|
||
|
|
|
|
|
(Модель ключа состоит |
задается равным 0 для открытого состояния |
|
|
|
|
|
|
из последовательно со |
ключа и 1 для закрытого состояния. |
|
|
|
|
|
|
единенных резистора Ron |
Snubber resistance Rs (Ohm): [Сопротивление |
|
Идеальный ключ |
|||||||
и ключа SW. Включение |
демпфирующей цепи (Ом)]. |
||||||
библиотекаPower |
происходит при (g=1). |
Snubber capacitance Cs (F): [Емкость демпфирую |
|||||
Выключение прибора |
щей цепи (Ф)]. |
||||||
|
|
Electronics |
происходит при сигнале |
На выходном порту блока обозначенном m, фор |
|||
(устройствасиловой |
(g=0).) |
мируется векторный Simulink сигнал из двух эле |
|||||
|
электроники) |
|
ментов (ток и напряжение ключа). |
||||

ДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
В рассматриваемой модели реализована реактивная нагрузка, зависящая от знака угловой скорости. Учет знака угловой скоро- сти выполняет блок Sign.
Параметры машины постоянного тока с независимым возбуж- дением можно определить на основе ее каталожных данных по следующим выражениям:
|
|
IВ |
UВ , |
|
|
|
|||
|
|
|
RВ |
|
|
|
|||
MНОМ |
|
PНОМ |
|
30 PНОМ , |
|||||
|
НОМ |
||||||||
|
|
|
nНОМ |
||||||
IЯНОМ |
|
|
PНОМ |
|
IВ, |
||||
UЯНОМ |
|
|
|
||||||
|
НОМ |
||||||||
LЯВ |
MНОМ |
, |
|
||||||
|
|
||||||||
|
|
|
IЯНОМ IВ |
||||||
LВ (2...5) |
|
LЯ RВ |
, |
||||||
|
|
||||||||
|
|
|
|
|
|
R Я |
|||
PМЕХ (0,005 0,02) PНОМ ,
Mf |
|
|
PМЕХ |
|
|
||
2 |
НОМ |
||||||
|
|
|
|||||
Mв |
|
|
|
PМЕХ |
, |
||
|
|
|
|||||
|
|
20 НОМ |
|||||
где
IВ – ток обмотки возбуждения (А),
UВ – напряжение обмотки возбуждения (В),
RВ –сопротивление обмотки возбуждения (Ом),
LВ – индуктивность обмотки возбуждения (Гн),
IЯном – номинальный ток обмотки якоря (А),
UЯном – номинальное напряжение обмотки якоря (В),

ДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
RЯ – сопротивление якоря (Ом),
MНОМ – номинальный момент (Н.м),
PНОМ – номинальная мощность (Вт),
nНОМ – номинальная скорость вращения якоря (об/мин),
НОМ – номинальная скорость вращения якоря (рад/с), PМЕХ – общие механические потери машины (Вт),
Mf – момент сухого трения (Н.м),
Мв – момент вязкого трения (Н.м).
Сопротивление якоря определяется по формуле:
R Я kT R ОЯ R ДП R КО R ЩК,
где kT - коэффициент учитывающий изменение сопротивле- ний при нагревании обмоток: (kT = 1,2 для случая, когда сопротивления приведены для не нагретого (холодного) состояния и kT = 1 в случае нагретого состояния обмо- ток);
RОЯ, RДП и RКО - сопротивления обмотки якоря, обмотки добавочных полюсов и компенсационной обмотки соот- ветственно, Ом;
RЩК - сопротивление щеточного контакта, Ом.
Сопротивление щеточного контакта можно определить по формуле:
R ЩК I UЩ ,
Яном
где UЩ - падение напряжения на щеточном контакте: ( UЩ=2 В - в случае графитовых щеток, UЩ=0,6 В - в случае медно-графитовых щеток);
IЯном - номинальный ток якоря, А.

ДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
Примечание:
Если в каталожных данных отсутствуют значения сопротивле- ний, то сопротивление якоря можно приблизительно определить по следующей формуле, полагая, что 50% всех потерь приходятся на долю переменных потерь:
R Я 1 UЯном 1 ном ,
2 IЯном
где ном - номинальный коэффициент полезного действия двигателя, о.е.
Индуктивность якоря, при отсутствии каталожных данных, можно приблизительно определить по формуле Уманского- Линвилля:
LЯ k |
UЯном |
, |
|
pП ном IЯном |
|||
|
|
где k - коэффициент: (k=0,6 - для машин без компенсацион- ной обмотки, k=0,25 - для машин с компенсационной обмоткой);
pП - число пар полюсов;
ном - номинальная угловая скорость двигателя, рад/с.
Индуктивность якорной цепи может быть найдена и по фор- муле:
LЯ С |
UЯНОМ |
, |
||
IЯНОМ |
nНОМ pП |
|||
|
|
|||
где |
С – коэффициент, принимающий значение С = (1 – |
|
2,5) - для машин с компенсационной обмоткой (большая |
|
величина относится к тихоходным двигателям), |
|
С = 6 для некомпенсированных машин, |
|
pП - число пар полюсов. |

ДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
Сопротивление обмотки возбуждения обычно приводится в каталожных данных. Если сопротивление приведено для холодно- го состояния, то его необходимо привести к нагретому состоянию используя коэффициент kT. Если сопротивление обмотки возбуж- дения отсутствует в каталожных данных, то его можно определить по формуле:
R В UВном , IВном
где UВном, IВном - соответственно номинальное напряжение обмотки возбуждения и номинальный ток возбуждения.
Индуктивность обмотки возбуждения обычно не приводится в каталожных данных. Индуктивность обмотки возбуждения явля- ется функцией потока двигателя и определяется с использованием кривой намагничивания двигателя:
LВ m WВ dФ kS , dIВ
где m - число последовательно соединенных обмоток полю- сов: (при последовательном соединении всех полюсов m = 2 pп, при параллельном соединении всех полюсов m = 1);
WВ - число витков обмотки возбуждения, приходящееся на один полюс;
kS - коэффициент рассеяния главных полюсов: kS = 1,1…1,25.
Для инженерных расчетов иногда целесообразно определить среднее значение индуктивности обмотки возбуждения. Среднее значение индуктивности обмотки возбуждения можно определить приблизительно по эмпирической формуле:
L |
В |
2 p |
п |
W2 |
|
Фном 2 p |
п |
W |
|
В S |
, |
|
|
В |
|
F |
В |
|
|
|
|||
|
|
|
|
|
|
ном |
|
|
|
|
|

ДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
где WВ - число витков обмотки возбуждения, приходящееся на один полюс; Фном - номинальный поток одного полюса, Вб;
В - индукция в воздушном зазоре, Тл; S - площадь сечения полюса, м2;
- плотность тока в обмотке, А/мм2;
- коэффициент: = 1+(0,5…0,7) ( -1)
- коэффициент учета рассеяния = (1,03…1,05).
Поток двигателя является функцией тока возбуждения и определяется по кривой намагничивания двигателя. Универсаль- ная кривая намагничивания обычно приводится в литературе и в справочниках по двигателям постоянного тока.
Универсальная кривая намагничивания может быть аппрок- симирована следующим выражением:
Ф* 2,901 I2В 2,275 exp(IВ) 2,275.
Конструктивный коэффициент двигателя:
к 2N pпa ,
где N - число проводников якоря; pп - число пар полюсов двигателя;
а - число пар параллельных ветвей обмотки якоря.
Номинальный коэффициент ЭДС и электромагнитного момен- та Сном = кФном определяется из выражения естественной электро- механической характеристики ДПТ:
к Фном Сном UЯном IЯном R Я ,ном
где ном - номинальная угловая скорость якоря ДПТ, рад/с.
Угловая скорость якоря ДПТ [рад/с] и частота вращения n [об/мин] связаны соотношением:
ДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
30n .
Номинальный ток якоря можно определить по формуле:
IЯном |
Р2ном |
IВном |
Р2ном |
|
UВном |
. |
ном Uном |
ном Uном |
|
||||
|
|
|
1,2 RВ |
|||
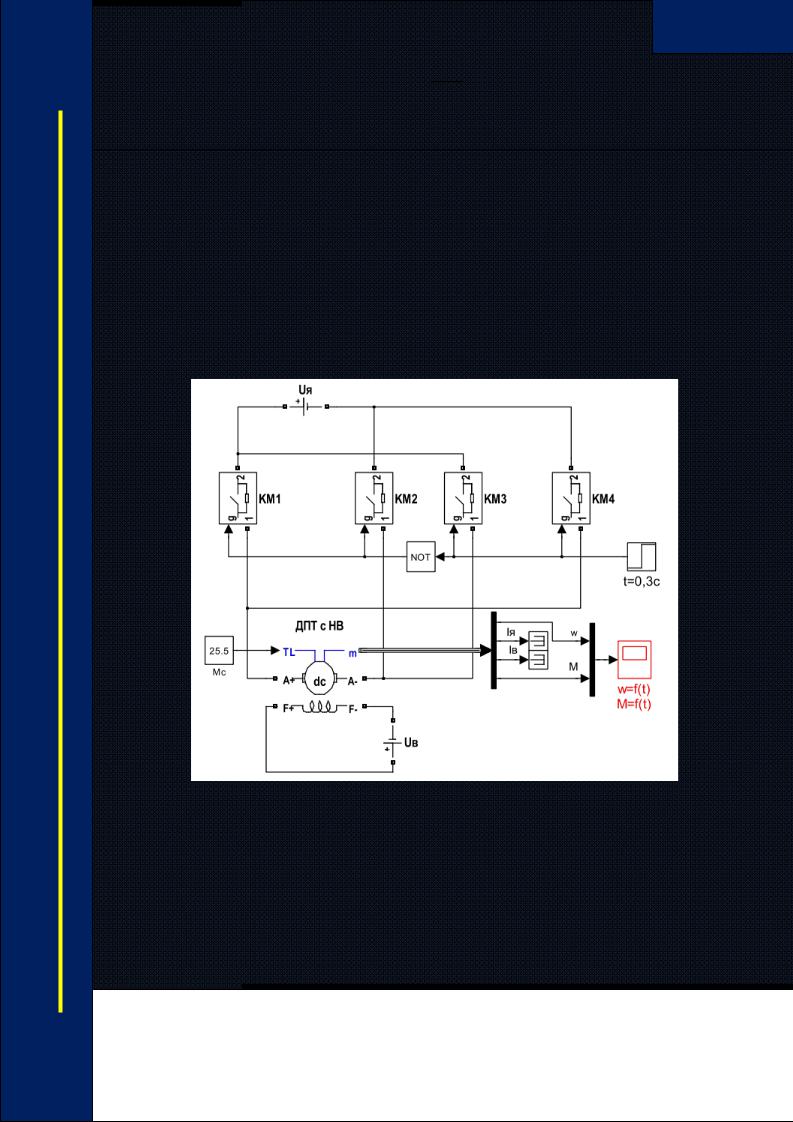
3.3 Пуск и реверс ДПТ с НВ (нагрузка активная)
Рисунок 6 – Модель для исследования пуска и реверса ДПТ с НВ
Блоки, использованные для создания SPS-модели для исследо- вания пуска и реверса ДПТ с НВ, с указанием их параметров и библиотек где они находятся, рассмотрены выше.