

МУ к лабораторной работе (ТЭП) № 2_2
.pdfДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
МинистерствообразованияРеспубликиБеларусь МинистерствообразованияинаукиРоссийскойФедерации
Государственное учреждение высшего профессионального образования
«БЕЛОРУССКО-РОССИЙСКИЙ УНИВЕРСИТЕТ»
Кафедра «Электропривод и АПУ»
Методические указания
к лабораторной работе № 2_2
РАСЧЕТПРОЦЕССОВПУСКААСИНХРОННОГОДВИГАТЕЛЯ
(«ТРН-АД»)
длястудентовспециальности1 – 53 01 05 – Автоматизированныеэлектроприводы
СИСТЕМА МОДЕЛИРОВАНИЯ ТЕХНИЧЕСКИХ СИСТЕМ И УСТРОЙСТВ
Matlab & Simulink
Могилёв 2012
ДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
Цельработы:
1.Изучить способ управляемого пуска асинхронного двига- теля в системе «ТРН-АД» без снижения быстродействия.
2.Изучить математические аспекты моделирования АД в среде Matlab & Simulink.
3.Освоить имитационное моделирование компонент СИФУ в среде Matlab & Simulink.
4.Разработать имитационную модель системы «ТРН-АД» и всех ее компонент (трехфазный источник, СИФУ, ТРН и т.д.).
5.Рассчитать переходные процессы пуска АД как при пря- мом подключении двигателя к сети, так и при управляе- мом пуске в системе «ТРН-АД».
6.Сравнить потери энергии за время пуска АД при прямом пуске (непосредственное подключение двигателя к сети переменного тока) и при управляемом пуске (экспонен- циальное изменение угла управления тиристорами в си- стеме «ТРН-АД»). Сделать выводы.

ДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
Отчетполабораторнойработедолженсодержать:
1.Титульный лист установленного образца
2.Цель работы
3.Исходные данные в соответствии с вариантом задания
4.Блок-схемы системы «ТРН-АД» и всех ее компонентов,
выполненные в Matlab & Simulink
5.Графики M=f(t) и =f(t) за время пуска АД, оформленные в соответствии с требованиями ГОСТ 2.105-95
6.График P=f(t) за время пуска АД, оформленный в соот- ветствии с требованиями ГОСТ 2.105-95
*) графики (п.5 и п.6) следует привести как для прямого пуска АД (непосредственное подключение к сети), такидляуправляемогопуска.

ДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
Методическиеуказанияповыполнениюработы
Краткие теоретические положения
Режим пуска АД характеризуется наличием вынужденной и свободной составляющих тока и потока. Переходные электромагнитные моменты имеют знакопеременный характер, и основная задача управления заключается в общем случае в максимальном их ограничении. При пуске АД реализация общего принципа управления электромагнитными переходными моментами возможна тремя различными способами, сформулированными в соответствующей литературе [1]. Одним из них является уменьшение переходной составляющей тока намагничивания за счет уменьшения скорости нарастания приложенного напряжения, что и реализуется в системах «ТРН-АД» при реализации процессов пуска. При этом скорость нарастания приложенного к двигателю напряжения может изменяться по любому закону. Наиболее прост в реализации и позволяет добиться лучших результатов в подавлении знакопеременных электромагнитных моментов экспоненциальный закон нарастания приложенного напряжения, в соответствии с формулой:
|
e |
t T |
, |
(1) |
U UУСТ 1 |
|
|||
|
|
|
|
|
где UУСТ – установившееся значение приложенного напряжения;
Т– постоянная времени, характеризующая темп нарастания напряжения.
Всистеме «ТРН-АД» с фазовым управлением наиболее просто осуществить управление скоростью изменения приложенного напряжения воздействуя на угол отпи-
рания тиристоров . Причем, наиболее просто в таких системах реализовать экспоненциальный закон изменения угла по выражению:
0 e t T , |
(2) |
где 0 – начальное значение угла открытия тиристоров ТРН; Т – постоянная времени.
Пусковые характеристики привода «ТРН-АД» при экспоненциальном законе изменения угла по уравнению (2) практически не отличаются от характеристик, получаемых при экспоненциальном законе изменения приложенного к двигателю напряжения по уравнению (1), в случае равенства постоянных времени Т. Другими словами, экспоненциальный закон изменение угла отпирания тиристоров ТРН позволяет получить экспоненциальный закон нарастания (с той же постоянной времени) прикладываемого к двигателю напряжения.
Оптимальные значения постоянной времени Т для фазового управления тиристорами определены в [1]. Независимо от типа и мощности АД постоянная времени Т должна лежать в пределах (0,01 – 0,015 с), при этом происходит максимальное ограничение знакопеременных переходных моментов без снижения быстродействия привода.
ДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
Разработка имитационной модели системы «ТРН-АД»
Наиболее мощным средством математического моделирования, обеспечивающее проведение исследований практически во всех известных областях науки и техники является математический пакет MATLAB фирмы The Math Works Inc. Возможности MATLAB весьма обширны, а по скорости выполнения задач эта система превосходит другие подобные системы. Структура пакета позволяет эффективно сочетать оба основных подхода к созданию модели: аналитический и имитационный. Этому способствует не только расширенный набор матричных и иных операций и функций, но и наличие инструментального приложения Simulink, предназначенного для решения задач блочного моделирования динамических систем и устройств и библиотеки блоков SimPowerSystems, предназначенных для моделирования электротехнических систем и устройств. Система визуального моделирования динамических систем Simulink является ядром интерактивного программного комплекса, предназначенного для математического моделирования линейных и нелинейных динамических систем и устройств, представленных своей функциональной блок-схемой, именуемой моделью. Для построения функциональной блок-схемы моделируемых устройств Simulink имеет обширную библиотеку готовых блочных компонентов SimPowerSystems, таких как, например, тиристор, асинхронный двигатель и т. д. и удобный редактор блок-схем.
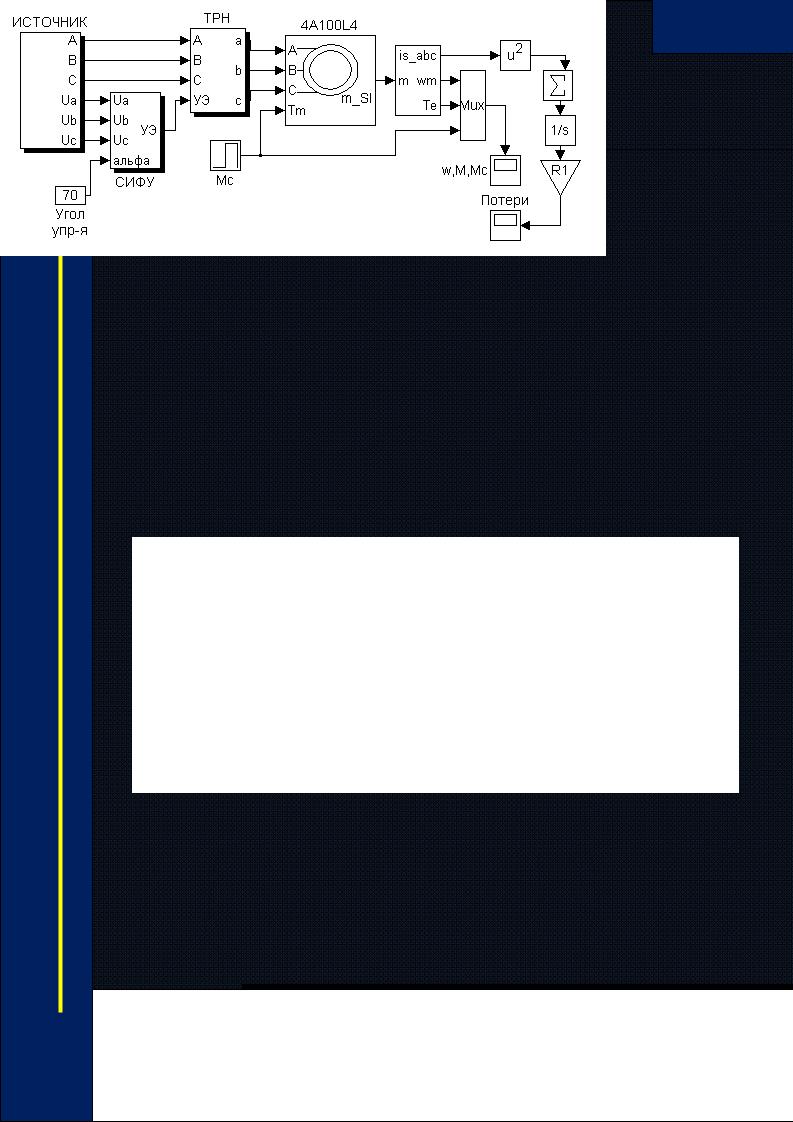
На рисунке 1 представлена разработанная в Simulink блок-схема (модель) системы ТРН-АД с фазовым управлением.
Рисунок 1 – Блок-схема системы ТРН-АД с фазовым управлением
Данная модель позволяет исследовать динамические характеристики привода по системе ТРН-АД, а так же определить потери энергии в статорной цепи двигателя за время переходного процесса.
Потери энергии в обмотках статора за время переходного процесса определяются выражением:
|
|
tПП |
iA2 |
|
iC2 dt , |
(3) |
P1 |
R1 |
|
iB2 |
|||
|
|
0 |
|
|
|
|
ДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
где R1 – активное сопротивление обмотки статора; iA, iB, iC – токи фаз статора.
На блок-схеме системы «ТРН-АД» (см. рисунок 1) ТРН, СИФУ и источник представлены в качестве подсистем, модели которых рассмотрены ниже.
Математическая модель асинхронного двигателя
Модель асинхронной трехфазной машины представлена дифференциальными уравнениями обобщенной электрической машины в осях (U, V), вращающихся с некоторой скоростью .
Система уравнений электромеханического преобразования энергии в обобщенной электрической машине состоит из четырех уравнений Кирхгофа для четырех обмоток, уравнения электромагнитного момента и уравнения движения.
Уравнения Кирхгофа можно записать, используя схемы замещения асинхронной машины по осям U и V (см. рисунок 2 и 3).
На схемах замещения индекс (1) указывает принадлежность параметров к статору, индекс (2) – к ротору. Все параметры ротора приведены к статору, о чем свидетельствует верхний индекс (`).
Инвариантность описания процессов протекающих в реальной машине дифференциальными уравнениями обобщенной машины справедлива при принятии следующих допущений:
1)принимается, что магнитная цепь машины имеет очень высокую магнитную проницаемость и не насыщается;
2)не учитываются потери в стали и влияние пазов;
3)принимается, что фазные обмотки выполнены одинаковыми (полные сопротивления фаз статора (ротора) обобщенной машины равны), т.е. машина является симметричной;
4)не учитываются высшие гармоники магнитного поля, т.е. магнитное поле каждой обмотки считается распределенным синусоидально по окружности статора;
5)воздушный зазор принимается равномерным;
6)принимается, что обмотки статора и ротора имеют одинаковое число витков, т.е. параметры ротора приведены к цепи статора.
+ |
1V |
|
( - эл) `2V |
+ |
+ |
1U |
|
( - эл) `2U |
+ |
||||
+ - |
L 1 |
- |
+ |
|
- + |
L 1 |
+ |
- |
|
||||
R1 |
|
L` 2 |
|
R`2 |
|
R1 |
|
L` 2 |
|
R`2 |
|
||
u 1U |
i 1U |
|
Lm |
i 2U |
|
u`2U |
u 1V |
i 1V |
|
Lm |
i 2V |
|
u`2V |
- |
|
|
|
|
|
- |
- |
|
|
|
|
|
- |
Рисунок 2 – Схема замещения по оси U |
Рисунок 3 – Схема замещения по оси V |
||||||||||||

ДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
Уравнения электромеханического преобразования энергии в обобщенной электрической машине в осях U,V имеет вид:
- Уравнения Кирхгофа для статора:
|
|
u |
|
R |
|
i |
|
|
d 1U |
|
|
|
|
||||||
|
|
|
1U |
|
|
|
1 |
|
1U |
|
|
dt |
1V |
; |
|
(4) |
|||
|
|
u |
1V |
R |
1 |
i |
1V |
|
|
d 1V |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
dt |
1U |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
- Уравнения Кирхгофа для ротора: |
|
|
|
|
|
|
|
|
|
|
|
||||||||
u |
2U |
R ' |
i |
2U |
d 2U |
ЭЛ |
|
|
|
||||||||||
|
|
|
2 |
|
|
|
|
dt |
|
2V |
; |
(5) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
u |
2V |
R ' |
i |
2V |
d 2V |
ЭЛ |
|
|
|
||||||||||
|
|
|
2 |
|
|
|
|
dt |
|
2U |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
- Уравнение электромагнитного момента: |
|
|
|
|
|
||||||||||||||
|
|
M |
3 |
p 1U i1V 1V i1U ; |
|
|
(6) |
||||||||||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- Уравнение движения: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d М |
|
1 |
M MC . |
|
|
|
(7) |
|||||||
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
dt |
|
|
|
JM |
|
|
|
|
|
|||||
В уравнениях (4) – (7) обозначены:
-u1U, u1V – напряжения статора по осям U и V;
-u`2U, u`2V – приведенные к статору напряжения ротора по осям U и V;
-i1U, i1V – токи статора по осям U и V;
-i`2U, i`2V – приведенные к статору токи ротора по осям U и V;
-1U, 1V – потокосцепления статора по осям U и V;
`2U, `2V – приведенные потокосцепления ротора по осям U и V;
-R1, R`2 – активное сопротивление обмоток статора и ротора, приведенноекстатору;
-М – угловая скорость ротора;
- ЭЛ – электрическая угловая скорость ротора ( ЭЛ М p );
-JМ – суммарный приведенный момент инерции;
-p – число пар полюсов АД;
-М, МС – момент электромагнитный и приведенный момент нагрузки.
Уравнения потокосцеплений имеют вид: - для статора в осях U,V:
|
L |
|
i |
|
L |
|
i` |
; |
(8) |
1U |
L |
1 |
i |
1U |
L |
m |
2U |
||
|
1 |
1V |
m |
i` |
|
|
|||
1V |
|
|
|
2V |
|
|

|
- для ротора в осях U,V: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ТЭП |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
ЭЛЕКТРОПРИВОДА» |
|
|
|
|
|
|
|
|
|
|
|
` |
L` |
i` |
L |
m |
i |
1U |
, |
|
|
|
|
|
|
|
(9) |
||
|
|
|
|
|
|
|
|
|
|
2U |
2 |
2U |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
` |
L` |
i` |
L |
|
i |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
m |
1V |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
2V |
2 |
2V |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
где |
L1 – полная индуктивность обмотки статора; |
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
L`2 – полная индуктивность обмотки ротора, приведенная к статору; |
||||||||||||||||||||||||||||
|
Lm – индуктивность взаимоиндукции. |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Индуктивности обмоток статора и ротора определяются выражением: |
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
L1 L 1 |
Lm |
|
, |
|
|
|
|
|
|
|
|
|
(10) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
L`2 L` 2 Lm |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
где |
L 1 – индуктивность рассеяния обмотки статора; |
|
|
|
|
|
|
|
|||||||||||||||||||||
|
L` 2 – индуктивность рассеяния обмотки ротора, приведенная к статору. |
||||||||||||||||||||||||||||
Преобразование трехфазной системы напряжений, прикладываемой к выводам |
|||||||||||||||||||||||||||||
обмоток асинхронной машины в напряжения обобщенной двухфазной машины по осям |
|||||||||||||||||||||||||||||
U,V осуществляется в соответствии с уравнениями, записанными в матричной форме: |
|||||||||||||||||||||||||||||
|
|
|
|
u1U |
|
|
1 |
2 cos( ) |
cos( ) |
3 |
sin( ) |
u1AB |
|
|
; |
|
(11) |
||||||||||||
|
|
|
|
|
|
|
|
3 |
|
|
|
sin( ) |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
u1V |
|
2sin( ) |
3 cos( ) |
u1BC |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
' |
|
|
|
1 |
|
|
|
cos( ) |
|
|
|
|
|
' |
|
|
|
, |
|
(12) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
ТЕОРИЯ |
|
|
|
|
u 2U |
|
2 cos( ) |
3 sin( ) |
u |
2AB |
|
|
|
||||||||||||||||
|
|
|
|
u'2V |
|
3 |
2sin( ) |
sin( ) |
3 cos( ) |
u'2BC |
|
|
|
|
|||||||||||||||
где |
- угловое положение ротора, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
= - ЭЛ – разница между угловым положением ротора и электрическим |
||||||||||||||||||||||||||||
|
угловым положением. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Преобразование переменных, полученных в осях U,V в реальные переменные по |
|||||||||||||||||||||||||||||
осям А,В,С осуществляется в соответствии с уравнениями преобразования, записанны- |
|||||||||||||||||||||||||||||
ми в матричной форме, например, для токов статора и ротора: |
|
|
|
|
|
|
|
||||||||||||||||||||||
« |
|
|
|
|
|
|
|
||||||||||||||||||||||
ДИСЦИПЛИНА |
|
i |
|
|
|
|
|
|
|
cos( ) |
|
|
|
|
|
sin( ) |
|
|
|
i |
|
|
(13) |
||||||
|
|
i |
1A |
|
|
cos( ) |
3 sin( ) |
3 cos( ) sin( ) |
|
|
1V |
; |
|||||||||||||||||
|
|
1B |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
i |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1U |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
i1C i1A i1B |
; |
|
|
|
|
|
|
|
|
|
|
(14) |
|||||
|
|
|
' |
|
|
|
|
|
|
cos( ) |
|
|
|
|
|
sin( ) |
|
|
|
' |
|
|
|
||||||
|
i |
2A |
|
|
cos( ) |
3 sin( ) |
|
3 cos( ) sin( ) |
|
|
i |
2V |
; |
(15) |
|||||||||||||||
|
|
|
' |
|
|
' |
|
||||||||||||||||||||||
|
i |
2B |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
2 |
|
|
i |
2U |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
i'2C i'2A |
i'2B . |
|
|
|
|
|
|
|
|
|
(16) |
||||||
Уравнения обобщенной электрической машины в системе координат U,V – наибо- |
|||||||||||||||||||||||||||||
|
лее общие. В электромеханике существует бесчисленное множество систем координат. |
||||||||||||||||||||||||||||

ДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
На практике нашли применение в основном системы координат , и d,q. Систему координат , целесообразно применять для исследования асинхронных машин с короткозамкнутым ротором, d,q – для описания процессов преобразования энергии в синхронных машинах и асинхронных с фазным ротором, систему координат U,V – при исследовании машин с вращающимся ротором и статором.
В MATLAB также имеется возможность выбирать тип ротора, а, следовательно, систему координат. Выбор типа ротора определяет значения и в уравнениях. Так при выборе фазного ротора = ЭЛ, =0; а при выборе короткозамкнутого - =0, =- ЭЛ. При этом преобразуются дифференциальные уравнения, описывающие обобщенную машину. При фазном роторе получаем уравнения, записанные в осях d,q – жестко связанными с ротором, при короткозамкнутом роторе - в осях , - жестко связанными с неподвижным статором. Это легко увидеть, проанализировав уравнения (4), (5), в которых
=d /dt=0 и u`2U=u`2V=0.
Преобразование координат позволяет упростить уравнения и получить постоянные коэффициенты перед переменными, но не уменьшает число уравнений.
Разработка имитационной модели ТРН
Основными элементами ТРН являются тиристоры. Особенностью тиристора является возможность произвольной задержки момента его отпирания при наличии на нем прямого напряжения. Тиристоры – это не полностью управляемые приборы, так как выключение их возможно только при прохождении текущего через них тока через ноль.
Тиристор может находиться в трех стабильных состояниях: а) закрытом при положительном напряжении на аноде, б) закрытом при отрицательном напряжении на аноде, в) открытом. Перевод тиристора из закрытого состояния в открытое может быть осуществлен пропусканием через промежуток «управляющий электрод – катод» положительного управляющего тока, при этом потенциал анода должен быть больше потенциала катода.
Для разработки математической модели силовой части ТРН воспользуемся готовой моделью тиристора, которая имеется в библиотеке моделей SimPowerSystems.
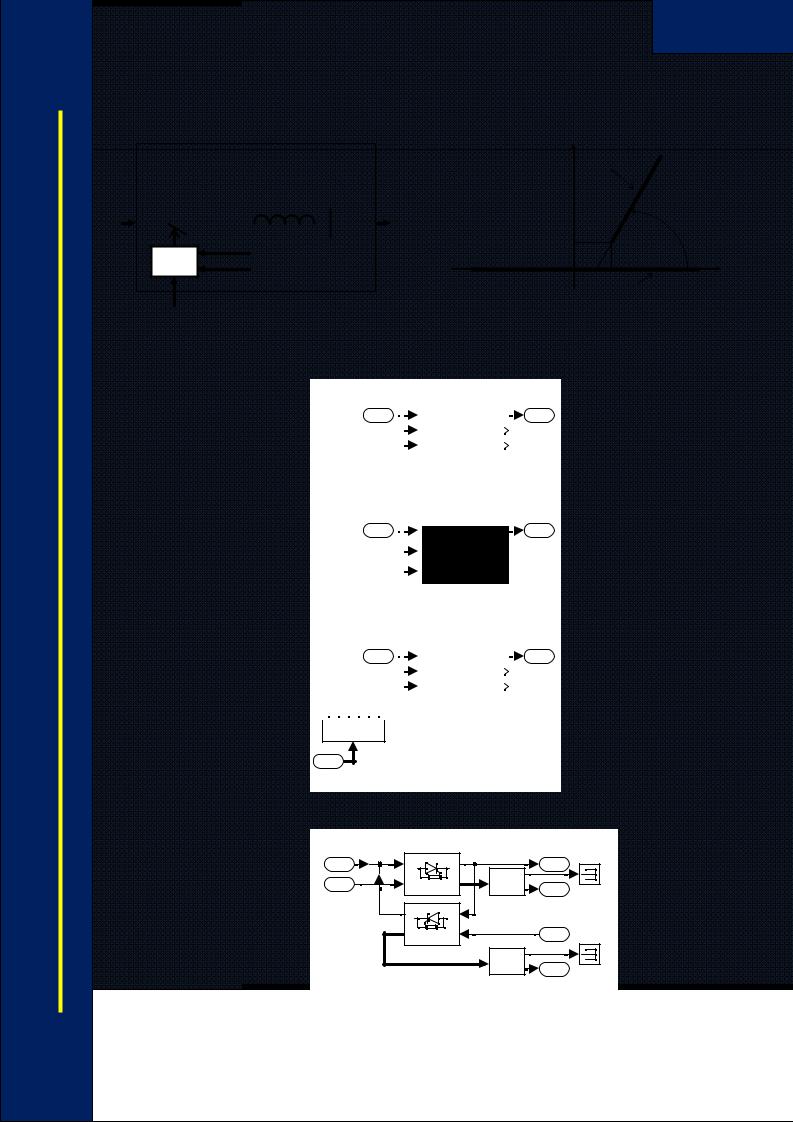
В MATLAB тиристор моделируется как резистор (R), катушка индуктивности (L) и источник постоянного напряжения ( U), включенные последовательно с выключателем (К), см. рисунок 4. Выключатель управляется логическим сигналом в зависимости от напряжения UАК, тока IАК и управляющего сигнала g. Статическая характеристика, поясняющая работу модели тиристора, приведена на рисунке 5.
Тиристор включается, когда (UАК > U) и присутствует положительный управляющий сигнал (g > 0). Продолжительность управляющего импульса должна быть достаточной, чтобы анодный ток тиристора (IАК) стал больше тока включения тиристора (IВ). Тиристор выключается, когда ток становится равным 0 (IАК=0).
Параллельно тиристору включена защитная цепочка (R1–C1).
ДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
На рисунке 6 представлена блок-схемы силовой части ТРН c фазовым управлением тиристорами. На рисунке 7 представлена блок-схемы встречно-параллельно включенных тиристоров для фазы А.
|
|
|
|
|
R1 |
|
|
|
|
C1 |
|
|
|
IАК |
Тиристор |
||||
|
|
|
|
|
|
|
|
|
|
|
|
открыт |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тиристор |
|
|
|
|
|
|
|
|
|
|
|
U |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
(A) |
|
K |
R |
|
|
L |
|
|
(K) |
|
открыт, |
||||||||
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
если g > 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
UАК |
IВ |
|
|
БЛ |
|
|
|
IАК |
U |
Тиристор |
UАК |
(g) |
|
закрыт |
|
Рисунок 4 – Модель тиристора |
|
|
Рисунок 5 – Статическая характеристика |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
тиристора |
|
|||
|
|
|
|
|
|
A |
|
|
VS1...VS2 |
a |
|||||||
1 |
|
|
|
|
A |
(A) |
|
|
1 |
||||||||
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
УЭ(A) |
m(A) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
УЭ(-A) m(A`) |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
VS3...VS4 |
b |
|||||||
|
|
|
2 |
|
|
|
|
A |
(A) |
|
|
2 |
|||||
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
УЭ(A) |
m(A) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
УЭ(-A) m(A`) |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
C |
|
|
VS5...VS6 |
c |
|||||||
|
|
|
|
|
3 |
|
|
|
|
A |
(A) |
|
|
3 |
|||
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
УЭ(A) |
m(A) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
УЭ(-A) |
m(A`) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Demux
4
УЭ
Рисунок 6 – Блок-схемы силовой части ТРН с фазовым управлением
A |
VS1 |
|
|
(A) |
|
1 |
a |
k |
Demux |
1 |
|
2 |
g |
m |
2 |
||
|
|||||
УЭ(A) |
|
|
|
||
k |
a |
|
m(A) |
||
|
|
УЭ(-A) |
|||
|
m |
g |
|
3 |
|
|
VS2 |
|
Demux |
3 |
|
|
|
|
|
||
|
|
|
|
m(A`) |
Рисунок 7 – Блок-схема встречно-параллельно включенных тиристоров