

МУ к лабораторной работе (ТЭП) № 2_2
.pdfДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
Разработка имитационной модели СИФУ
СИФУ предназначена для формирования управляющих импульсов на тиристоры ТРН в функции входного управляющего сигнала. Чтобы разработать адекватную модель СИФУ, рассмотрим особенности реальных СИФУ.
Существует большое многообразие СИФУ. Они различны по своим свойствам. Однако имеют какие-то специфические признаки. К числу основных признаков относятся:
–способ отсчета угла ,
–тип синхронизации,
–вид развертываемого сигнала,
–форма преобразования сигнала.
По способу отсчета угла СИФУ делят на:
–одноканальные,
–многоканальные.
В многоканальных СИФУ отсчет углов для каждого тиристора производится в собственном канале, в одноканальных – в одном канале для всех тиристоров. Одноканальные СИФУ позволяют исключить различие параметров элементов цепей задающих выдержки времени.
По типу синхронизации различают:
–синхронные СИФУ,
–асинхронные СИФУ.
В синхронных СИФУ определения требуемого момента включения тиристора производится путем отсчета временного интервала от момента перехода через 0 синусоиды питающего напряжения сети, в асинхронных – от момента предыдущего включения тиристора. В асинхронных СИФУ синхронизация с сетью служит только для ограничения углов. Асинхронные СИФУ могут быть только одноканальными, синхронные - и одноканальными и многоканальными.
По виду развертываемого сигнала СИФУ делят на:
–СИФУ вертикального действия,
–СИФУ интегрирующего действия.
ВСИФУ вертикального действия развертывается опорный сигнал, а в СИФУ интегрирующего действия – управляющий сигнал.
Для выполнения своих основных функций СИФУ должна содержать три основных
узла:
–узел синхронизации,
–фазосдвигающее устройство,
–формирователи импульсов.
ДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
Вразрабатываемой модели рассматривается многоканальная синхронная СИФУ вертикального действия.
Всоответствии с вышеизложенными положениями разработана блок-схема СИФУ (см. рисунок 8), которая состоит из трех подсистем: устройства синхронизации, фазосдвигающего устройства и формирователя импульсов. Принцип работы основных узлов СИФУ понятен из структурных схем моделей этих узлов, которые приведены ниже.
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
альфа |
|
|
|
|
|
|
|
|
сигнал упр-я |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
1 |
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
сигнал включения |
УЭ |
|
1 |
|
|
|
|
|
|
|
|
сигнал упр-я |
сигнал включения |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Ua |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
УЭ |
|
2 |
|
|
|
|
B Выход |
|
|
|
|
опорный сигнал |
Uи |
|
|
|
Uи |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Ub |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Фазосдвигающее |
|
Формирователь |
|
|
|
||||
3 |
|
|
|
|
C |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
устройство |
|
импульсов |
|
|
|
|||||
Uc |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Устройство |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
синхронизации |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 8 – Блок-схема СИФУ вертикального действия.
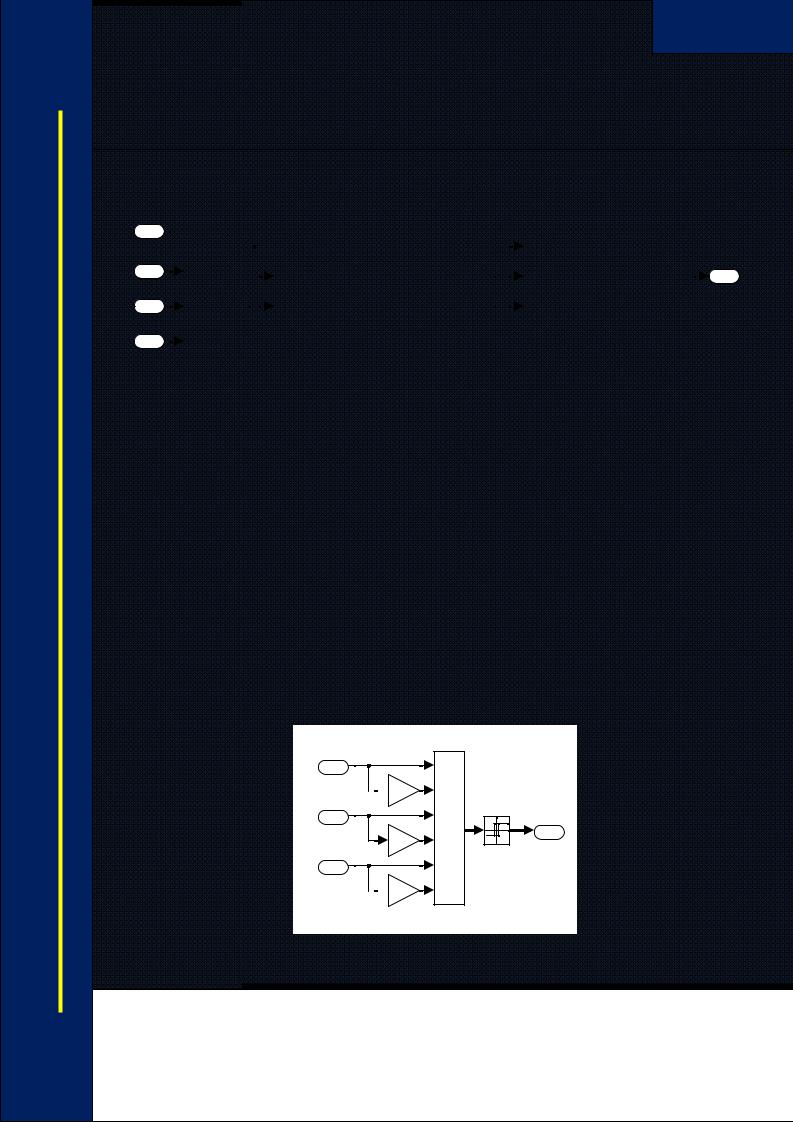
Имитационная модель устройства синхронизации СИФУ
Устройство синхронизации предназначено для формирования прямоугольных импульсов, которые затем поступают на вход фазосдвигающего устройства. На вход устройства синхронизации СИФУ подаются сетевые фазные напряжения, таким образом, отсчет угла управления тиристорами осуществляется с момента перехода через нулевое значение фазного питающего напряжения (поэтому данный способ и называют «фазовым управлением»).
На рисунке 9 представлена блок-схема устройства синхронизации СИФУ, разрабо-
танная в Simulink.
1
A  -1
-1
2 |
|
Mux |
1 |
|
B |
-1 |
|||
|
||||
|
|
Выход |
||
|
|
|
3 C  -1
-1
Mux
Рисунок 9 – Блок-схемы устройства синхронизации
|
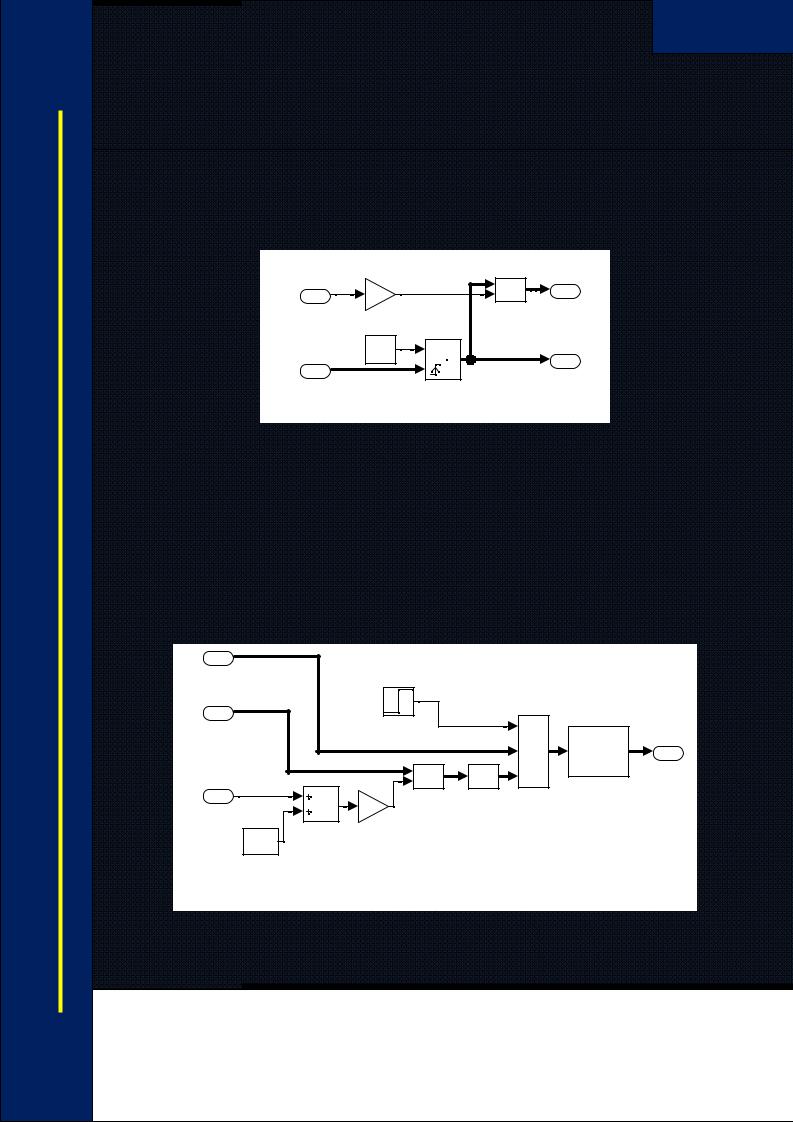
Имитационная модель фазосдвигающего устройства СИФУ |
ТЭП |
||||
|
|
|||||
ЭЛЕКТРОПРИВОДА» |
В фазосдвигающем устройстве вырабатывается сигнал на включение тиристора в |
|||||
момент равенства нулю алгебраической суммы сигнала управления и опорного сигнала, |
||||||
поступающего из устройства синхронизации и преобразованного в пилообразный сигнал |
||||||
с помощью интегратора. |
|
|
|
|
||
На рисунке 10 представлена блок-схема фазосдвигающего устройства СИФУ, раз- |
||||||
работанная в Simulink. |
|
|
|
|
||
|
1:360 |
|
|
|
||
1 |
-K- |
>= |
1 |
|
||
сигнал |
|
сигнал |
|
|||
|
включения |
|
||||
упр-я |
|
|
||||
|
|
|
|
|||
|
50 |
1 |
2 |
|
||
2 |
|
s |
|
|||
|
Uи |
|
||||
опорный |
|
|
|
|||
|
|
|
|
|||
сигнал |
|
|
|
|
||
Рисунок 10 – Блок-схемы фазосдвигающего устройства |
|
|
||||
Имитационная модель формирователя импульсов СИФУ |
|
|||||
|
|
|
|
|
||
ТЕОРИЯ |
Формирователь импульсов формирует прямоугольные импульсы управления необ- |
|||||
ходимой длительности и амплитуды. |
|
|
|
|||
На рисунке 11 представлена блок-схема формирователя импульсов управления |
||||||
СИФУ, разработанная в Simulink. |
|
|
|
|
||
2 |
|
|
|
|
||
сигнал |
|
|
|
|
||
включения |
|
|
|
|
||
« |
|
|
|
|
||
3 |
|
|
|
|
||
ДИСЦИПЛИНА |
t > 0.01 |
|
|
|
||
Uи |
|
|
|
|||
|
|
|
|
|||
сигнал |
|
AND |
In1 Out1 |
1 |
||
>= |
NOT |
|
УЭ |
|||
упр-я |
Фильтр |
|||||
|
||||||
1 |
|
|
|
|||
-K- |
|
|
|
|||
|
|
|
|
|||
90 |
|
|
|
|
||
Длительность |
|
|
|
|
||
импульса |
|
|
|
|
||
управления |
|
|
|
|
||
Рисунок 11 – Блок-схемы формирователя импульсов |
|
|
||||
Формирователь импульсов (см. рисунок 11) содержит фильтр, который обеспечи- |
||||||
вает задержку импульсов управления на тиристоры в соответствии с инерционностью |
||||||
ДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
СИФУ. Распределение импульсов управления на тиристоры осуществляется в самом ТРН, блок-схема силовой части которого приведена на рисунке 6.
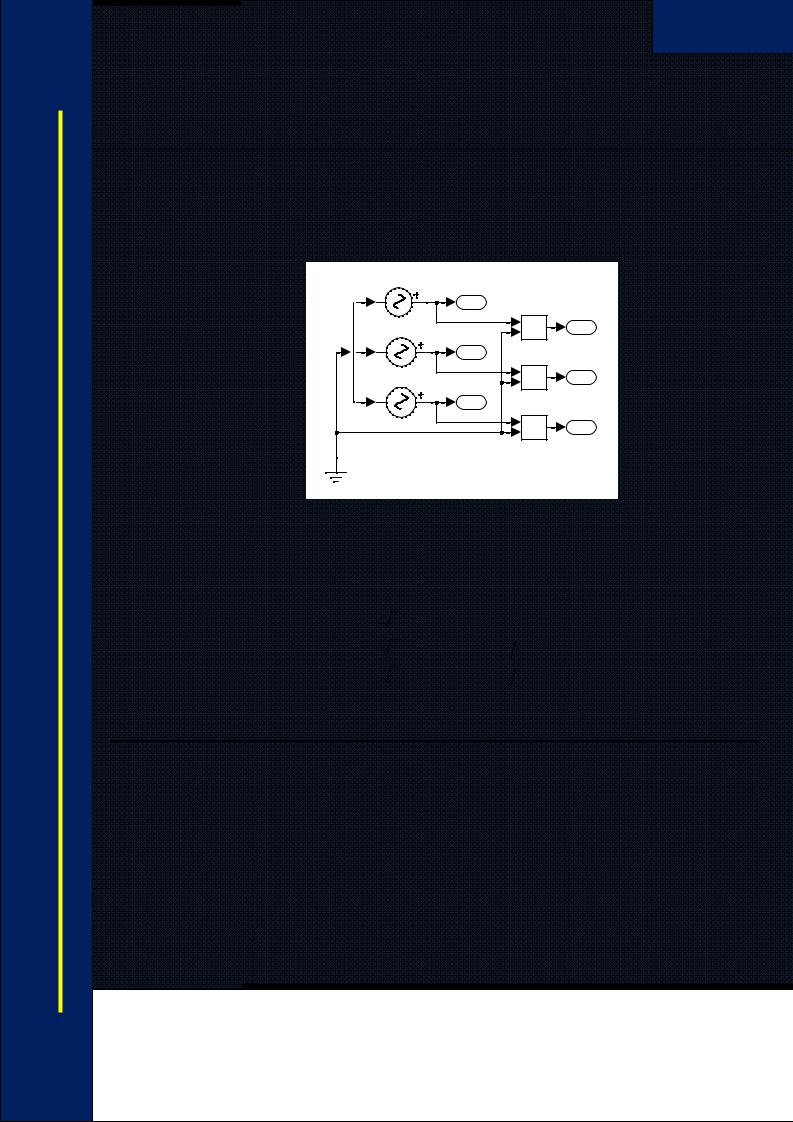
Разработка имитационной модели источника
Блок-схема источника трехфазного переменного напряжения (см. рисунок 12) имеет три вывода (А,В,С) для подключения силовой части ТРН и три вывода (Ua,Ub,Uc) для подключения СИФУ, в случае фазового управления тиристорами ТРН.
ua |
A |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
ub |
B |
+ |
v |
4 |
|
- |
|
Ua |
|
|
2 |
|
|
|
|
|
|
|
|
uc |
C |
+ |
v |
5 |
|
- |
|
Ub |
|
|
3 |
|
|
|
|
|
|
|
|
|
|
+ |
v |
6 |
|
|
- |
||
|
|
|
|
Uc |
Рисунок 12 – Блок-схема трехфазного источника питания
Модель трехфазного источника формирует на выходе синусоидальные сигналы фазных напряжений в соответствии с выражениями:
UA |
2 U sin t |
|
|
|
2 U sin t 2 |
3 , |
(17) |
UB |
|||
UC |
2 U sin t 4 |
3 |
|
|
|
|
|
где U – действующее значение напряжения, В.
На основании разработанной модели привода «ТРН-АД» проведен расчет динамических характеристик при пуске АД.
Моделирование проводилось при изменении угла по экспоненциальному закону
всоответствии при постоянной времени равной 0,012 с.
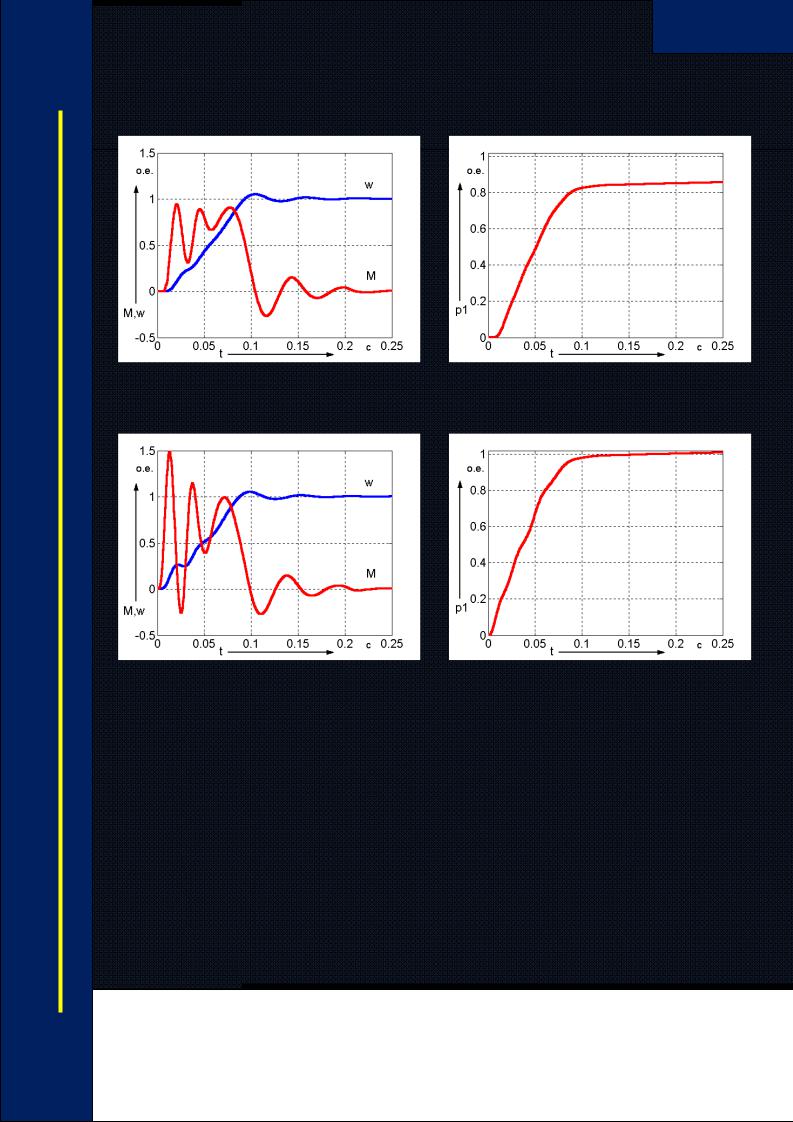
Врезультате моделирования рассчитаны зависимости момента, скорости и потерь энергии в статорной цепи в функции времени за время пуска. Указанные зависимости представлены на рисунке 13 в относительных единицах. За базовые величины приняты: для скорости – скорость идеального холостого хода АД; для момента – максимальный (критический) момент АД; для потерь - потери энергии в статорной цепи за время прямого пуска АД.
ДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
Для сравнения и анализа динамических характеристик при пуске привода «ТРНАД» с фазовым управлением при экспоненциальном законе изменения угла на рисунке 14 представлены аналогичные характеристики, рассчитанные при прямом пуске.
Рисунок 13 – Графики переходных процессов при экспоненциальном законе изменения угла управления тиристорами
Рисунок 14 – Графики переходных процессов при прямом пуске АД
Все характеристики рассчитаны для асинхронного двигателя 4А100L4 (номинальная мощность – 4 кВт).
Анализ рассчитанных характеристик показывает, что при экспоненциальном законе изменения угла управления в процессе пуска привода по системе «ТРН-АД» с фазовым управлением наблюдается ограничение знакопеременных переходных моментов без снижения быстродействия привода, при этом потери энергии в статорной цепи АД за время пуска ниже аналогичных потерь, соответствующих прямому пуску АД.
В качестве начального угла управления при фазовом управлении тиристорами принималось предельное значение угла управления. Для фазового управления тиристорами принимался 0 = 150 эл.гр.

ДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
Рекомендуемаялитература:
Петров, Л.П. Управление пуском и торможением асинхронных двигателей. – М.: Энергоиздат, 1981. – 184 с.: ил.
ДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
Исходныеданныедлялабораторнойработы:
Таблица 1 – Паспортные данные асинхронных двигателей
№ |
|
Р2НОМ, |
НОМ, |
cos НОМ, |
sНОМ, |
R1, |
X1, |
R2, |
X2, |
X , |
K, |
J, |
варианта |
Тип АД |
кВт |
% |
- |
- |
Ом |
Ом |
Ом |
Ом |
|
о.е. |
кг м2 |
Ом |
||||||||||||
1 |
4А71В2У3 |
1,1 |
77,5 |
0,87 |
0,063 |
11,6 |
4,81 |
6,41 |
7,48 |
249 |
2,2 |
0,0011 |
2 |
4А80А2У3 |
1,5 |
81,0 |
0,85 |
0,042 |
5,6 |
3,4 |
3,27 |
5,4 |
167 |
2,6 |
0,0018 |
3 |
4А80В2У3 |
2,2 |
83,0 |
0,87 |
0,043 |
3,62 |
2,38 |
2,34 |
4,15 |
129 |
2,6 |
0,0021 |
4 |
4А90L2У3 |
3,0 |
84,5 |
0,88 |
0,043 |
2,59 |
2,05 |
1,69 |
3,6 |
122 |
2,5 |
0,0035 |
5 |
4А100S2У3 |
4,0 |
86,5 |
0,89 |
0,033 |
1,51 |
1,54 |
1,01 |
2,77 |
95 |
2,2 |
0,0059 |
6 |
4А100L2У3 |
5,5 |
87,5 |
0,91 |
0,034 |
1,05 |
1,14 |
0,757 |
2,31 |
79,9 |
2,5 |
0,0075 |
7 |
4А112M2У3 |
7,5 |
87,5 |
0,88 |
0,025 |
0,686 |
0,865 |
0,417 |
2,09 |
55,2 |
2,8 |
0,01 |
8 |
4А132M2У3 |
11,6 |
88,0 |
0,90 |
0,023 |
0,418 |
0,638 |
0,261 |
1,25 |
43,9 |
2,8 |
0,023 |
9 |
4А160S2У3 |
15,0 |
88,0 |
0,91 |
0,021 |
0,403 |
0,713 |
0,171 |
0,93 |
31 |
2,2 |
0,048 |
10 |
4А160M2У3 |
18,5 |
88,5 |
0,92 |
0,021 |
0,313 |
0,588 |
0,141 |
0,767 |
28,8 |
2,2 |
0,053 |
11 |
4А180S2У3 |
22,0 |
88,5 |
0,91 |
0,019 |
0,207 |
0,483 |
0,106 |
0,585 |
19,1 |
2,5 |
0,07 |
12 |
4А180M2У3 |
30,0 |
90,5 |
0,90 |
0,018 |
0,118 |
0,288 |
0,071 |
0,434 |
15,0 |
2,5 |
0,085 |
13 |
4А200M2У3 |
37,0 |
90.5 |
0,89 |
0,019 |
0,091 |
0,295 |
0,066 |
0,377 |
12,9 |
2,5 |
0,15 |
14 |
4А200L2У3 |
45,0 |
91,0 |
0,90 |
0,018 |
0,071 |
0,233 |
0,053 |
0,344 |
12,95 |
2,5 |
0,17 |
15 |
4А80А4У3 |
1,1 |
75,0 |
0,81 |
0,054 |
9,62 |
6,25 |
5,45 |
9,62 |
136 |
2,2 |
0,0032 |
16 |
4А80В4У3 |
1,5 |
77,0 |
0,83 |
0,058 |
7,42 |
4,82 |
4,26 |
7,42 |
118 |
2,2 |
0,0033 |
17 |
4А90L4У3 |
2,2 |
80.0 |
0,83 |
0,051 |
4,29 |
3,33 |
2,63 |
5,70 |
92 |
2,4 |
0,0056 |
18 |
4А100S4У3 |
3,0 |
82,0 |
0,83 |
0,044 |
2,57 |
2,60 |
1,75 |
4,28 |
72,5 |
2,4 |
0,0087 |
19 |
4А100L4У3 |
4,0 |
84,0 |
0,84 |
0,046 |
1,72 |
2,02 |
1,36 |
3,59 |
61,5 |
2,4 |
0,011 |
20 |
4А112M4У3 |
5,5 |
85,5 |
0,85 |
0,036 |
1,23 |
1,50 |
0,787 |
2,49 |
53,7 |
2,2 |
0,017 |
21 |
4А132S4У3 |
7,5 |
87,5 |
0,86 |
0,029 |
0,699 |
1,24 |
0,481 |
1,89 |
43,7 |
3,0 |
0,028 |
22 |
4А132M4У3 |
11,0 |
87,5 |
0,87 |
0,028 |
0,432 |
0,854 |
0,321 |
1,31 |
32,1 |
3,0 |
0,04 |
23 |
4А160S4У3 |
15,0 |
88,5 |
0,88 |
0,023 |
0,354 |
0,648 |
0,188 |
0,98 |
30,2 |
2,3 |
0,1 |
24 |
4А160M4У3 |
18,5 |
89,5 |
0,88 |
0,022 |
0,260 |
0,525 |
0,148 |
0,803 |
26,6 |
2,3 |
0,13 |
25 |
4А180S4У3 |
22,0 |
90,0 |
0,90 |
0,020 |
0,219 |
0,428 |
0,112 |
0,641 |
21,4 |
2,3 |
0,19 |
26 |
4А180M4У3 |
30,0 |
91,0 |
0,89 |
0,019 |
0,133 |
0,267 |
0,071 |
0,47 |
15,3 |
2,3 |
0,23 |
27 |
4А200M4У3 |
37,0 |
91,0 |
0,90 |
0,017 |
0,125 |
0,276 |
0,058 |
0,45 |
14,1 |
2,5 |
0,37 |
28 |
4А200L4У3 |
45,0 |
92,0 |
0,90 |
0,016 |
0,091 |
0,219 |
0,045 |
0,374 |
12,3 |
2,5 |
0,45 |
29 |
4А80В6У3 |
1,1 |
74,0 |
0,74 |
0,080 |
8,67 |
7,95 |
7,95 |
13,7 |
116 |
2,2 |
0,0046 |
30 |
4А90L6У3 |
1,5 |
75,0 |
0,74 |
0,064 |
5,91 |
5,91 |
4,73 |
11,3 |
96,7 |
2,2 |
0,0073 |
31 |
4А100L6У3 |
2,2 |
81,0 |
0,73 |
0,051 |
3,51 |
4,29 |
2,61 |
8,2 |
74,1 |
2,2 |
0,013 |
32 |
4А112MA6У3 |
3,0 |
81,0 |
0,76 |
0,047 |
2,53 |
2,20 |
1,88 |
2,98 |
56,6 |
2,5 |
0,017 |
33 |
4А112MB6У3 |
4,0 |
82,0 |
0,81 |
0,051 |
1,86 |
1,76 |
1,49 |
2,65 |
48,2 |
2,5 |
0,021 |
34 |
4А132S6У3 |
5,5 |
85,0 |
0,80 |
0,033 |
1,20 |
1,29 |
0,736 |
1,97 |
34,1 |
2,5 |
0,04 |
35 |
4А132M6У3 |
7,5 |
85,5 |
0,81 |
0,032 |
0,804 |
0,939 |
0,536 |
1,47 |
28,2 |
2,5 |
0,06 |
36 |
4А160S6У3 |
11,0 |
86,0 |
0,86 |
0,027 |
0,713 |
1,07 |
0,293 |
1,46 |
29,3 |
2,0 |
0,14 |
37 |
4А160M6У3 |
15,0 |
87,5 |
0,87 |
0,026 |
0,457 |
0,737 |
0,206 |
1,18 |
22,1 |
2,0 |
0,18 |
38 |
4А180M6У3 |
18,5 |
88,0 |
0,87 |
0,024 |
0,337 |
0,661 |
0,156 |
0,781 |
17,4 |
2,0 |
0,22 |
39 |
4А200M6У3 |
22,0 |
90,0 |
0,90 |
0,023 |
0,267 |
0,588 |
0,128 |
0,748 |
21,9 |
2,4 |
0,4 |
40 |
4А200L6У3 |
30,0 |
90,5 |
0,90 |
0,021 |
0,181 |
0,473 |
0,087 |
0,512 |
14,6 |
2,4 |
0,45 |
Примечания:
-сопротивления обмоток приведены для «Г» - образной схемы замещения;
-сопротивления обмоток ротора приведены к статору;
-все сопротивления приведены для нагретого состояния;
-момент инерции механизма, приведенный к скорости двигателя равен моменту инерции ротора;
-момент нагрузки принять равным 40 % от момента номинального двигателя.

ДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
Приложение A
(справочное)
Листингпрограммы MathCad для расчета паспортныхданных АД
ДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
Приложение Б (справочное)
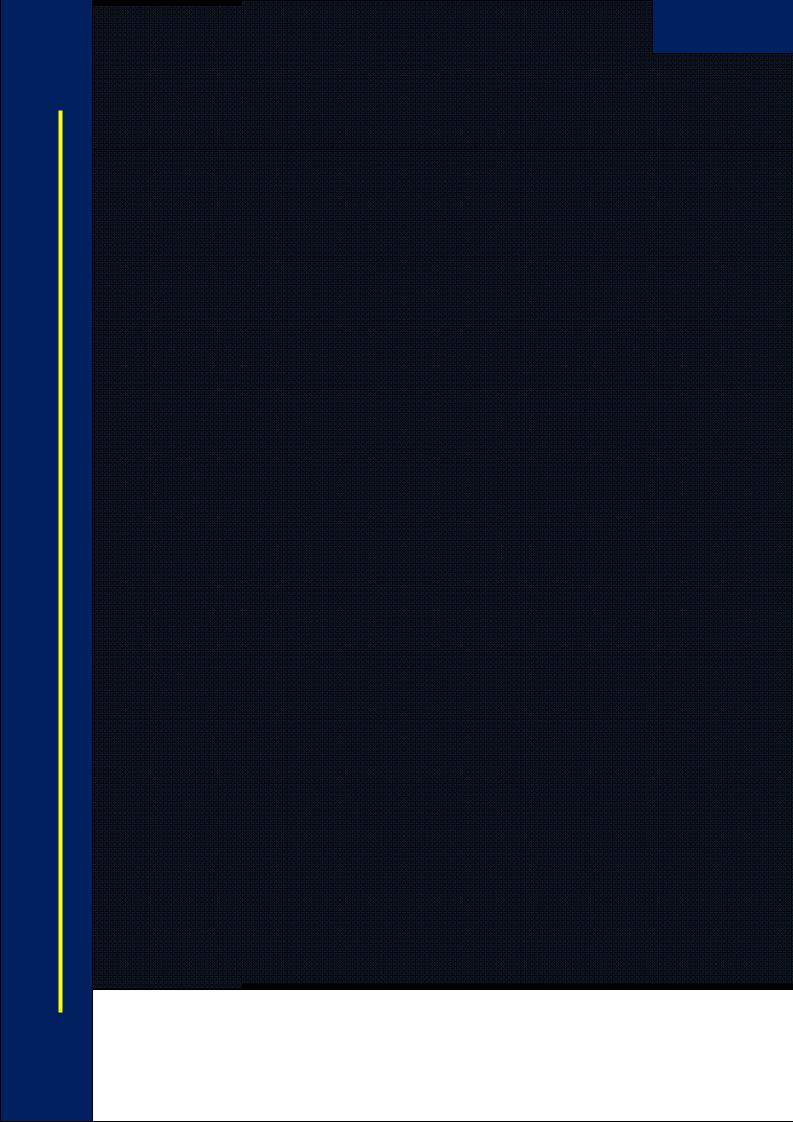
Модель привода по системе«ТРН АД», реализованная в Matlab версии 7.6
Приложение В (справочное)
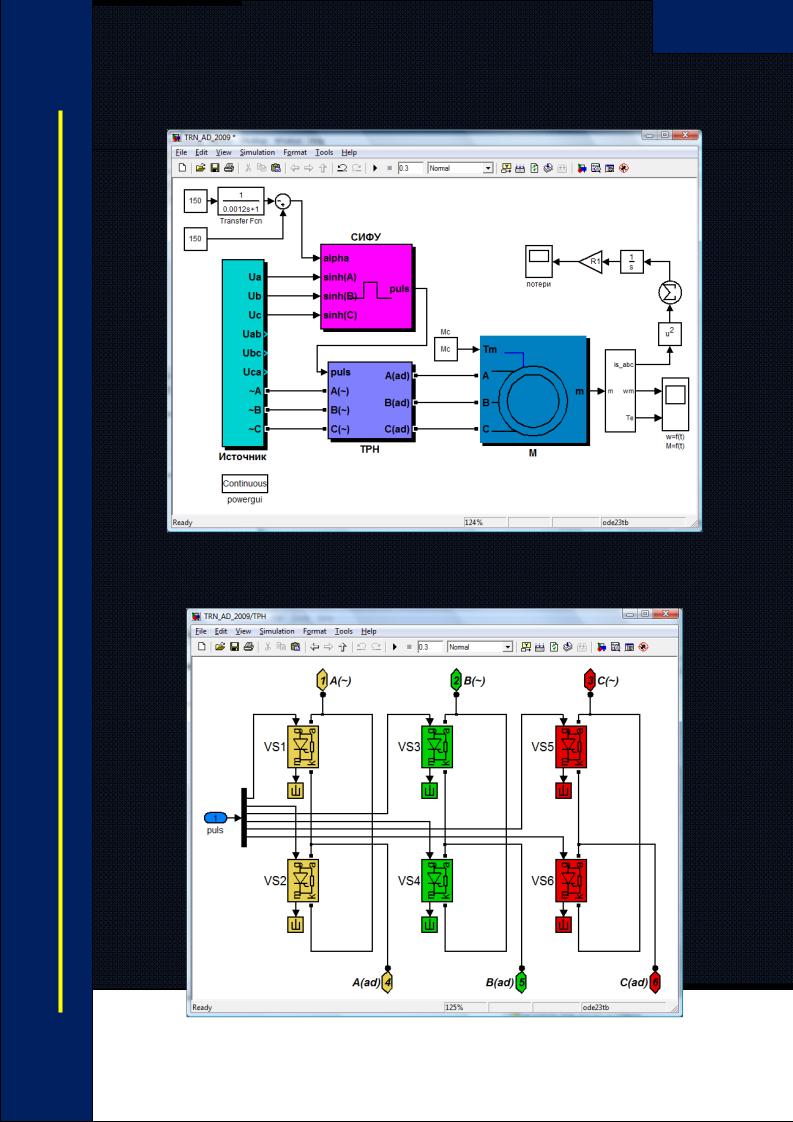
ИмитационнаямодельТРН, реализованная вMatlab версии7.6

ДИСЦИПЛИНА «ТЕОРИЯ ЭЛЕКТРОПРИВОДА»
ТЭП
Приложение Г (справочное)
Имитационнаямодельисточника, реализованная в Matlab версии 7.6
Приложение Д (справочное)
ИмитационнаямодельСИФУ, реализованная в Matlab версии 7.6