

1.7. Основні етапи розробки систем
При всій різноманітності систем і підходів до їх аналізу та синтезу, можна виділити ряд етапів, обов'язкових при розробці систем будь-якої складності.
Етап 1. Постановка задачі.
Перш за все постановка задачі відповідає побажанням замовника, але в процесі вивчення об'єкта задача поступово уточнюється. Зазвичай цей етап є результатом спільної праці групи розробників: замовника, економіста, операціоніста, управлінця, соціолога, електронщика і представляє спробу пошуку компромісного вирішення питань, що представляють інтереси всіх представлених у групі розробників. На цьому етапі проводиться детальне дослідження об'єкта, вивчення багатьох факторів, що впливають на поведінку і результати роботи системи, яка створюється . У подальшому, з багатьох факторів відбирають, на основі визначених критеріїв значимості, найбільш суттєві, що представляють інтерес для групи розробників і які найбільш впливають на поведінку системи. В результаті цих робіт формулюється змістовна (мовна) постановка задачі, узгоджена з замовником.
Етап 2. Побудова математичної моделі.
Отримана на першому етапі мовна модель на другому етапі підлягає формалізації, тобто повинна бути виражена у вигляді математичної моделі. У загальному випадку математична модель системи має вид: знайти параметри вектора управління X = { х1;х2...хn}, що забезпечують
max (min) W = f(X,Y) (1.4)
при обмеженнях:
gi(X,Y)≤
bі,i
=![]() , (1.5)
, (1.5)
де: W = f(X,Y) - цільова функція (показник якості або ефективності системи); X, Y - вектори управління і збурень; gі - функція застосування і-го ресурсу; bі - обмеження на величину цього ресурсу (наприклад, чисельність машинного парку АТП, плановий фонд заробітної плати і т.п.)
Етап 3. Знаходження рішення.
Для вирішення поставленої задачі в залежності від структури і виду Цільової функції та обмежень (1.4,1.5) використовують ті чи інші методи теорії пошуку оптимальних рішень (що називаються також методами математичного програмування):
а) Лінійне програмування
Цей метод використовується якщо W = f(X,Y) та gі(X,Y) є лінійні функції відносно X. Відмітимо, що апарат лінійного програмування найбільш розвинутий і має численні практичні застосування.
в) Нелінійне програмування.
Використовується тоді, коли f(X,Y) та gі(X,Y) є нелінійними функціями відносно X.
с) Лінійне дискретне (цілочисельне) програмування.
Використовується коли f(X,Y) та g,(X,Y) лінійне відносно X, але на компоненти вектора X накладаються умови цілочисельності.
X = {
х1;х2...хn},
де Хі
(і
=
![]() )-
ціле
число. Наприклад, при перевезення сипучих
матеріалів може використовуватися
лінійне програмування оскільки об'єми
перевезень можуть бути виражені яким
завгодно числом (2 тони, 2,05 тони, і т.д.)
Але при перевезенні будівельних
конструкція об'єми можуть бути виражені
лише цілими числами (2 панелі, 5 панелей,
але не 5,5 панелей).
)-
ціле
число. Наприклад, при перевезення сипучих
матеріалів може використовуватися
лінійне програмування оскільки об'єми
перевезень можуть бути виражені яким
завгодно числом (2 тони, 2,05 тони, і т.д.)
Але при перевезенні будівельних
конструкція об'єми можуть бути виражені
лише цілими числами (2 панелі, 5 панелей,
але не 5,5 панелей).
d) Геометричне програмування.
Використовується коли f(X,Y) та gі(X,Y) є виражені за допомогою аддитивно-мультиплікативних моделей типу:

є) Динамічне програмування.
Використовується коли процес оптимізації є багатокроковим, при цьому є оптимальне управління на кожному кроці, що забезпечує у результаті глобальний оптимум, отриманий за рахунок оптимізації на всіх кроках.
Математично це може бути виражено у загальному випадку наступним чином.
Знайдемо оптимум на і-му кроці управління (max або min):

д) Евристичне програмування.
Застосовується у тих випадках, коли аналітичний пошук оптимуму можливий, при цьому відмовляються від пошуку точного оптимуму і обмежуються лише досить достовірним результатом оптимізації.
Етап 4. Перевірка та корегування отриманої моделі.
Розуміючи, що модель не відображає у повній мірі властивості об'єкта, необхідно перевірити модель на адекватність, порівнюючи результати, отримані за її допомогою з результатами реальних експериментальних досліджень об'єкта.
Таку перевірку доцільно проводити по наступній логічній схемі (проводиться багаторазово до отримання адекватної моделі)(див. рис. 1.14).
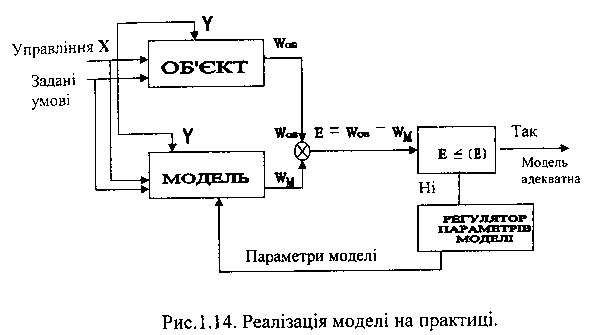
Рис. 1.14. Реалізація моделі на практиці
На виробництві впроваджують спроектовану модель управління. Потім, на основі результатів поточної діяльності за визначений період оцінюють ефективність нових організаційних методів управління за схемою, зазначеною на рис. 1.14. Схема є очевидною і не потребує зайвих пояснень.