

Планы скоростей и ускорений кулисного механизма
Чтобы построить план скоростей, необходимо составить векторное уравнение скоростей. При этом следует иметь в виду, что точка А1 (рис.3.11), принадлежащая кривошипу 1, и точка А2, принадлежащая ползуну 2 и совпадающая на плане механизма с точкой А1, вращаются вокруг оси О с одинаковыми линейными и угловыми скоростями:
![]() и
и
![]() .
.
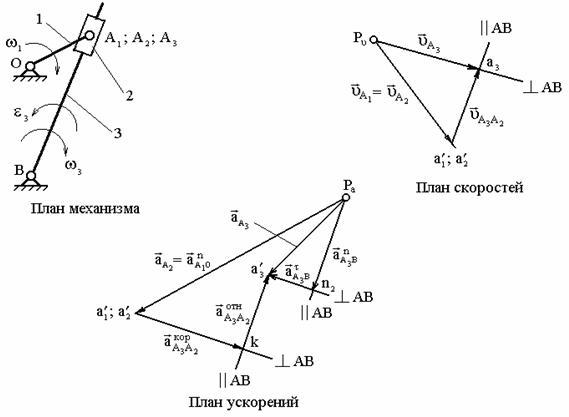
Рис. 3.11. Построение планов скоростей и ускорений кулисного механизма
Если задана величина
![]() ,
то величину линейной скорости рассчитывают
по формуле
,
то величину линейной скорости рассчитывают
по формуле
![]() ,
м/с.
,
м/с.
Векторы скоростей
![]() и
и
![]() направлены
перпендикулярно радиусу ОА1.
Скорость точки
направлены
перпендикулярно радиусу ОА1.
Скорость точки
![]() ,
принадлежащей кулисе 3, можно найти по
векторному уравнению скоростей
,
принадлежащей кулисе 3, можно найти по
векторному уравнению скоростей
![]()
где
![]() – вектор скорости точки А3
кулисы относительно точки А2
ползуна, параллельный прямой А1В
плана механизма.
– вектор скорости точки А3
кулисы относительно точки А2
ползуна, параллельный прямой А1В
плана механизма.
После выбора масштаба плана скоростей
![]() (см. предыдущие примеры механизмов)
строят план скоростей. Из полюса Рv
(см. рис. 3.11) перпендикулярно отрезку ОА
плана механизма проводится вектор
скорости
(см. предыдущие примеры механизмов)
строят план скоростей. Из полюса Рv
(см. рис. 3.11) перпендикулярно отрезку ОА
плана механизма проводится вектор
скорости
![]() ,
совпадающий с вектором скорости
,
совпадающий с вектором скорости
![]() (см. рис. 3.11, вектор
(см. рис. 3.11, вектор
![]() ).
Через точку а1 проводят прямую,
параллельную прямой А1В,
а через полюс Рv
– прямую, перпендикулярную А1В.
На их пересечении получают точку а3
и наносят направление векторов (стрелки),
руководствуясь векторным уравнением
скоростей.
).
Через точку а1 проводят прямую,
параллельную прямой А1В,
а через полюс Рv
– прямую, перпендикулярную А1В.
На их пересечении получают точку а3
и наносят направление векторов (стрелки),
руководствуясь векторным уравнением
скоростей.
Вычисляют величины скоростей:
![]() ,
м/с,
,
м/с,
![]() ,
м/с,
,
м/с,
где
![]() и
и
![]() – длины векторов, измеренные на плане
скоростей.
– длины векторов, измеренные на плане
скоростей.
Угловая скорость коромысла 3 вычисляется по формуле
![]() ,с-1.
,с-1.
Для построения плана ускорений составляются векторные уравнения
![]()
![]()
где
![]() –
ускорение ползуна;
–
ускорение ползуна;
![]() – ускорение Кориолиса точки А3
относительно А2 (возникает
тогда, когда есть относительное движение
двух точек с одновременным вращением
их вокруг какой-либо оси; в данном случае
точка А3 движется относительно
А2, вместе они вращаются
вокруг неподвижной точки В;
направление вектора
– ускорение Кориолиса точки А3
относительно А2 (возникает
тогда, когда есть относительное движение
двух точек с одновременным вращением
их вокруг какой-либо оси; в данном случае
точка А3 движется относительно
А2, вместе они вращаются
вокруг неподвижной точки В;
направление вектора
![]() определяется так: необходимо условно
повернуть вектор скорости
определяется так: необходимо условно
повернуть вектор скорости
![]() по направлению вращения
кулисы 3 – это и будет направление
ускорения Кориолиса);
по направлению вращения
кулисы 3 – это и будет направление
ускорения Кориолиса);
![]() – относительное ускорение точки А3
относительно А2 (его вектор
параллелен А3В);
– относительное ускорение точки А3
относительно А2 (его вектор
параллелен А3В);
![]() – ускорение точки В (
– ускорение точки В (![]() ,
так как точка В неподвижна);
,
так как точка В неподвижна);
![]() – нормальное ускорение точки А3
относительно В (направление вектора
от А3 к точке В);
– нормальное ускорение точки А3
относительно В (направление вектора
от А3 к точке В);
![]() – тангенциальное ускорение точки А3
относительно В (вектор направлен
перпендикулярно А3В).
– тангенциальное ускорение точки А3
относительно В (вектор направлен
перпендикулярно А3В).
Вычисление величины ускорения Кориолиса и нормальных ускорений можно произвести по формулам
![]() м/с2,
м/с2,
![]() м/с2,
м/с2,
![]() м/с2.
м/с2.
Масштаб плана ускорений выбирают, используя формулу
![]() ,
,
![]() ,
,
где Ра а'2 –
длина вектора, изображающего ускорение
![]() на плане ускорений; она выбирается
произвольно с таким расчётом, чтобы
будущий план ускорений разместился на
отведённом месте чертежа и масштаб был
удобен для использования в дальнейших
расчётах.
на плане ускорений; она выбирается
произвольно с таким расчётом, чтобы
будущий план ускорений разместился на
отведённом месте чертежа и масштаб был
удобен для использования в дальнейших
расчётах.
Остальные известные величины ускорений переводятся масштабом в векторные отрезки соответствующих длин:
![]() ,
мм;
,
мм;
![]() ,
мм.
,
мм.
Затем строится план
ускорений.
Из произвольно выбранного полюса
– точки Ра – проводится
вектор ускорения
![]() с длиной Раа'2.
Из точки а'2 перпендикулярно
А2В проводится вектор
ускорения
с длиной Раа'2.
Из точки а'2 перпендикулярно
А2В проводится вектор
ускорения
![]() с длиной a'2k.
Через точку k проводится
прямая, перпендикулярная этому вектору.
Таким образом, будет выполнено графическое
изображение первого векторного уравнения
ускорений из двух, ранее составленных.
Затем приступают к построению второго
векторного уравнения. Из полюса Ра
параллельно прямой А3В
проводится вектор ускорения
с длиной a'2k.
Через точку k проводится
прямая, перпендикулярная этому вектору.
Таким образом, будет выполнено графическое
изображение первого векторного уравнения
ускорений из двух, ранее составленных.
Затем приступают к построению второго
векторного уравнения. Из полюса Ра
параллельно прямой А3В
проводится вектор ускорения
![]() длиной Раn2,
а через точку n2
– перпендикулярная ему прямая до
пересечения с прямой, проведённой ранее
через точку k. На
пересечении этих прямых получается
точка а'3. Вектор, соединяющий
точки Ра и а'3, –
полное ускорение аА3 точки
А3.
длиной Раn2,
а через точку n2
– перпендикулярная ему прямая до
пересечения с прямой, проведённой ранее
через точку k. На
пересечении этих прямых получается
точка а'3. Вектор, соединяющий
точки Ра и а'3, –
полное ускорение аА3 точки
А3.
Угловое ускорение кулисы вычисляется по формуле
![]() с-2,
с-2,
где n2a'3 – длина вектора, изображающего на плане ускорений тангенциальное ускорение точки А3.
Направление углового ускорения
определяется, как и в предыдущем примере
(для кривошипно-ползунного механизма),
по направлению условного вращения
кулисы 3 вектором ускорения
![]() :
условно перенести этот вектор в точку
А3 плана механизма
и посмотреть, в каком направлении он
будет «вращать» кулису.
:
условно перенести этот вектор в точку
А3 плана механизма
и посмотреть, в каком направлении он
будет «вращать» кулису.
Аналитический метод кинематического анализа
Общие сведения о методе
Графический (метод диаграмм) и графоаналитический методы (метод планов скоростей и ускорений) кинематического анализа механизмов имеют недостатки: невысокая точность, определяемая точностью графических построений, и большая трудоёмкость. При иcпользовании графического метода необходимо построить диаграммы перемещений, скоростей и ускорений для каждой исследуемой точки механизма, а при использовании графоаналитического метода – несколько планов скоростей и ускорений механизма, чтобы определить динамику изменения скорости и ускорения интересующих нас точек (т.е. при различных положениях механизма).
Эти недостатки отсутствуют в аналитическом методе. Но при этом необходимо составлять достаточно сложные аналитические зависимости (формулы) и иметь возможность решать их с использованием компьютерных техники и технологии, что в последнее время возможно и доступно.
Методы аналитического исследования:
метод замкнутых векторных контуров (метод Зиновьева) удобен для кинематического анализа практически всех используемых в технике несложных рычажных механизмов;
метод преобразования координат (метод Морошкина) удобен для кинематического анализа многозвенных механизмов типа манипуляторов промышленных роботов.
Прежде чем говорить об аналитическом методе, введем некоторые понятия и определения.