

5. Асинхронные микродвигатели Общие сведения
5.1. Принцип действия и основные особенности однофазных асинхронных микродвигателей
Асинхронные микродвигатели (АМД) выполняют те же функции, что и обычные силовые двигатели средней и большой мощности. Поэтому к ним предъявляются аналогичные требования:
высокие энергетические показатели (КПД,
 );
);хорошие пусковые свойства (большой пусковой момент при малом пусковом токе).
Двигатели получили большое распространение благодаря простоте конструкции, высокой надежности, хорошей технологичности.
В подавляющем большинстве случаев они имеют на статоре две обмотки, сдвинутые на 90 эл. градусов. Одна обмотка включается в сеть непосредственно и называется главной. Другая включается в сеть через фазосдвигающий элемент и называется вспомогательной (пусковой).
Ротор всегда короткозамкнутый.
В зависимости от использования вспомогательной обмотки и от фазосдвигающего элемента асинхронные микродвигатели подразделяются на 5 групп:
с пусковым сопротивлением;
с пусковым конденсатором;
с пусковым и рабочим конденсатором;
с рабочим конденсатором;
с экранированными полюсами.
Двигатели первой и второй групп пускаются как двухфазные, но при достижении скорости, близкой к номинальной, вспомогательную обмотку отключают и они продолжают работать как однофазные.
5.2. Свойства фазосдвигающих элементов
При
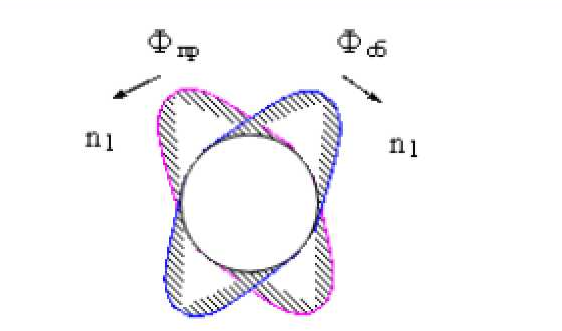
питании однофазной обмотки статора
переменным током возникает пульсирующее
магнитное поле, которое можно представить
двумя круговыми полями
![]() и
и
![]() ,
вращающимися в разные стороны (рис.
5.1). Каждое из этих полей индуцирует в
обмотке ротора ЭДС и токи. Токи ротора,
взаимодействуя с соответствующим полем
статора, создают вращающие моменты (
,
вращающимися в разные стороны (рис.
5.1). Каждое из этих полей индуцирует в
обмотке ротора ЭДС и токи. Токи ротора,
взаимодействуя с соответствующим полем
статора, создают вращающие моменты (![]() и
и
![]() ).
При неподвижном роторе эти моменты
совершенно одинаковы, поэтому
результирующий момент микродвигателя
равен 0.
).
При неподвижном роторе эти моменты
совершенно одинаковы, поэтому
результирующий момент микродвигателя
равен 0.
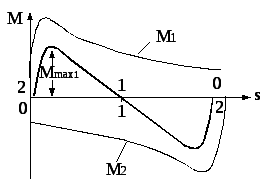
Механическую
характеристику однофазного двигателя
можно получить сложением вращающих
моментов прямого (![]() )
и обратного (
)
и обратного (![]() )
полей (рис. 5.2).
Анализ этой характеристики позволяет
сделать следующие выводы:
)
полей (рис. 5.2).
Анализ этой характеристики позволяет
сделать следующие выводы:
однофазный двигатель не имеет собственного пускового момента. В этом его характерная особенность и главный недостаток.
двигатель не имеет определенного направления вращения. Оно зависит от первичного толчка.
для однофазного двигателя не возможен режим электромагнитного тормоза (при
 ).
).при одном и том же нагрузочном моменте, что и у симметричного трехфазного или двухфазного двигателя, однофазный будет иметь большее скольжение, следовательно, большие потери в роторе и меньший КПД.
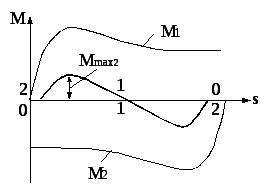
перегрузочная способность однофазного двигателя зависит от активного сопротивления ротора. В последнем легко убедиться, рассматривая рис. 5.3, где приведены механические характеристики двух двигателей с
 (а) и
(а) и (б).
(б).
|
Рис. 5.1. Представление пульсирующего поля двумя вращающимися |
Рис. 5.2. Механическая характеристика однофазного асинхронного двигателя |

а б
Рис. 5.3. Зависимость максимального момента однофазного асинхронного двигателя от активного сопротивления ротора
Итак,
при пуске
однофазного
двигателя (![]() )
в нем возникаетпульсирующее
магнитное
поле. Но если привести его во вращение,
поле станет эллиптическим.
Объясняется это следующим образом.
)
в нем возникаетпульсирующее
магнитное
поле. Но если привести его во вращение,
поле станет эллиптическим.
Объясняется это следующим образом.
При
работе двигателя с небольшим скольжением,
например s
=
0,1, частота тока в роторе от прямого поля
статора близка к нулю (при
![]() ,
,![]() ),
а частота тока от обратного поля –
близка к двойной частоте сети (
),
а частота тока от обратного поля –
близка к двойной частоте сети (![]() ).
).
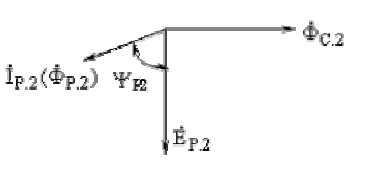
Поскольку
индуктивное сопротивление обмотки
ротора пропорционально частоте, ток
ротора (
![]() ),
отстает от ЭДС (
),
отстает от ЭДС (![]() ),
индуцированной в нем обратным полем
статора (
),
индуцированной в нем обратным полем
статора (![]() ),
на угол близкий к
),
на угол близкий к
![]() (
(![]() ).
Магнитный поток
).
Магнитный поток![]() ,
созданный током
,
созданный током
![]() ,
находится почти в противофазе к обратному
полю статора
,
находится почти в противофазе к обратному
полю статора![]() и
в значительной мере его ослабляет.
и
в значительной мере его ослабляет.
Получается, что в двигателе имеет место прямое поле и небольшое обратное поле. Они вместе образуют одно результирующее поле – эллиптическое.
При
работе двигателя в
режиме холостого хода,
когда скольжение близко к нулю (![]() ),
демпфирующее действие обратного потока
ротора
),
демпфирующее действие обратного потока
ротора![]() оказывается
на столько сильным, что обратное поле
статора
оказывается
на столько сильным, что обратное поле
статора ![]() практически
пропадает и результирующее поле
становится почти круговым.
практически
пропадает и результирующее поле
становится почти круговым.
Схему
замещения однофазного микродвигателя
получим, если в (1.24) положим
![]() ,
,![]() .
Тогда
.
Тогда
 ;
;
 (5.1)
(5.1)
Ток однофазного двигателя
 ,
(5.2)
,
(5.2)
Знаменатель
выражения (5.2) является входным
сопротивлением однофазного двигателя.
Его можно представить (индекс
![]() опущен) как
опущен) как
![]() .
(5.3)
.
(5.3)
где:
![]() – полное сопротивление обмотки статора;
– полное сопротивление обмотки статора;
![]() ,
,
![]() – полные сопротивления контуров
намагничивания и ротора токам прямой
и обратной последовательностей.
– полные сопротивления контуров
намагничивания и ротора токам прямой
и обратной последовательностей.
Сопротивлению
![]() (5.3)
соответствует схема рис. 5.4, которая и
будет схемой замещения однофазного
микродвигателя.
(5.3)
соответствует схема рис. 5.4, которая и
будет схемой замещения однофазного
микродвигателя.

Рис. 5.4. Схемы замещения однофазного асинхронного микродвигателя
Задача 5.1. Во сколько раз (приблизительно) ток холостого хода однофазного двигателя отличается от тока холостого хода симметричного трехфазного двигателя?