

27. Линейный поворотный трансформатор
Известно,
что синус малого угла равен самому углу.
Поэтому с погрешность 0,1% можно считать,
что СКПТ обеспечит линейную зависимость
U=ka
в диапазоне
![]() .
Если допустить погрешность 1%, диапазон
увеличится до
.
Если допустить погрешность 1%, диапазон
увеличится до![]() .
Однако в гораздо более широком интервале
углов линейную зависимостьU=ka
реализует функция
.
Однако в гораздо более широком интервале
углов линейную зависимостьU=ka
реализует функция
![]() .
.
При k = 0,5 ее можно представить в виде степенного ряда
 ,
,
члены
которого быстро убывают. С погрешность
1% можно ограничиться только линейным
коэффициентом этого ряд в диапазоне
углов
![]() .
.

Рис.6.7. Схема ЛПТ с первичным симметрированием
Подбором
коэффициента в пределах k=0,52![]() 0,56
точность аппроксимации можно довести
до 99, 9% в диапазоне углов
0,56
точность аппроксимации можно довести
до 99, 9% в диапазоне углов![]() .
.
Наиболее распространенная схема линейного поворотного трансформатора представлена на рис.6.7, из которой видно, что это схема с первичным симметрированием.
Следовательно, можно принять Фq=0 и при анализе процессов в ПТ учитывать только продольный поток Фd.
Если пренебречь внутренним падением напряжения в обмотках
![]() .
.
Отсюда
![]() .
.
Выходной сигнал
![]() .
.
Из
последней формулы видно, что при
проектировании СКПТ следует коэффициент
трансформации выбирать в пределах
0,52![]() 0,56.
0,56.
27.1 Поворотный трансформатор–построитель
Поворотный трансформатор–построитель используется для решения задач, связанных с нахождением гипотенузы по двум катетам, преобразованием декартовых координат в полярные и т.п. Схема установки приведена на рис. 6.8.
Если к обмоткам статора приложить напряжения, пропорциональные катетам треугольника Uа≡a и Uв≡b, возникнут магнитные потоки, которые при отсутствии насыщения, также будут пропорциональны этим катетам: Фа≡a и Фв≡b. Потоки, складываясь, образуют результирующий поток, очевидно пропорциональный гипотенузе "с" Фрез≡с. Этот поток будет индуцировать в роторных обмотках ЭДС. Под действием ЭДС косинусной обмотки исполнительный двигатель придет во вращение и через понижающий редуктор начнет поворачивать трансформатор до тех пор, пока ось косинусной обмотки не станет перпендикулярной результирующему потоку, ибо только в этом положении исполнительный двигатель перестанет получать питание в свою обмотку управления. В таком положении ось синусной обмотки будет совпадать с осью результирующего потока, который и наведет в ней ЭДС пропорциональную гипотенузе треугольника. Если заранее настроить систему должным образом, угол поворота трансформатора будет равен углу треугольника a.
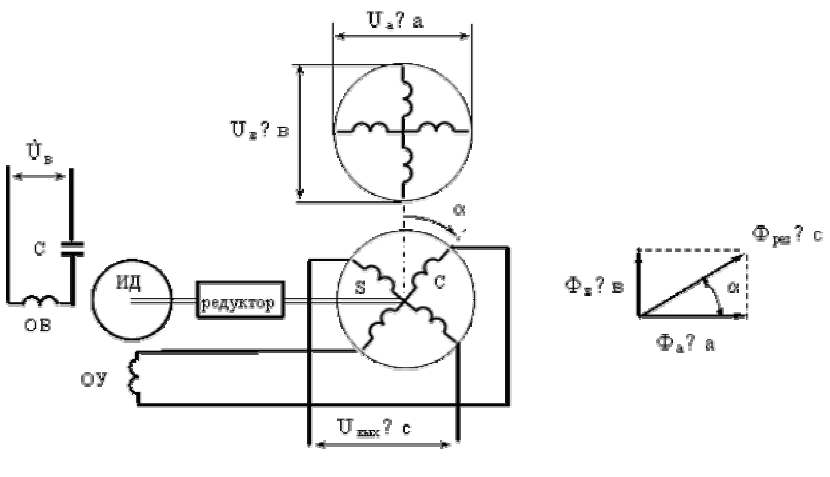
Рис.6.8. Схема включения поворотного трансформатора–построителя
27.2 Погрешности поворотных трансформаторов
Как уже упоминалось выше, поворотные трансформаторы относятся к машинам высокой точности, поэтому вопросы погрешностей здесь приобретают особое значение.
Погрешности ПТ можно разделить на следующие группы:
погрешности, обусловленные принципом действия;
погрешности, вызванные конструкцией ПТ как электрической машины;
технологические погрешности;
погрешности, определяемые условиями эксплуатации.
Погрешности, обусловленные принципом действия – это погрешности,
вызванные падением напряжения в обмотках статора и ротора, несовершенством
симметрирования, неточностью аппроксимации в ЛПТ и т.п. причинами. Так при изменении тока возбуждения Iв, особенно в СКПТ с первичным симметрированием, изменяется ЭДС
![]()
изменяется поток возбуждения [Фв.m=Eв/(4, 44fWвkо)], а значит и выходное
напряжение трансформатора. Избавиться от этого типа погрешностей практически не возможно.
Конструктивные погрешности – это погрешности от зубчатого строения статора и ротора, нелинейности кривой намагничивания, высших гармоник магнитного поля и других ограничений конструктивного характера.
Для уменьшения данного класса погрешностей трансформатор выполняют с большим числом пазов на полюс и фазу q= 5÷15, что удорожает ПТ, но повышает его точность. Одну пару обмоток (например, статорную) выполняют с шагом y=2/3t другую – с шагом y=4/5t, а в особо важных случаях используют специальные "синусные" обмотки (см. далее). Обязательно c025a0278делают скос пазов (обычно на роторе) при слабонасыщенной магнитной цепи и сравнительно большом воздушном зазоре.
Технологические погрешности – это погрешности, вызванные неточностью изготовления штампов статора и ротора, эксцентриситетом статора и ротора, некачественной изоляцией листов сердечников и обмоток и т.п. Для устранения этих погрешностей необходима тщательная технологическая проработка и высокая культура производства завода изготовителя.
Эксплуатационные погрешности – это погрешности, возникающие вследствие изменения температуры, давления и влажности окружающей среды, недостаточно продуманной схемы включения обмоток трансформатора, использования нестабилизированных источников питания и т.д. Иногда их называют дополнительными в отличие от первых трех, считающимися основными погрешностями.
Различные погрешности ПТ часто связаны между собой и даже обуславливают друг друга. На практике точность работы поворотных трансформаторов оценивают по следующим показателям:
1) максимальной погрешности отображения функциональной зависимости, определяемой в процентах от наибольшего значения выходного напряжения. Эта погрешность находится в пределах: для СКПТ 0,005÷0,2%; для ЛПТ 0,05÷0,2%;
2)
максимальной асимметрией нулевых точек
(для СКПТ), которую определяют следующим
образом: На обмотки В и К статора
поочередно подают напряжения и находят
углы, при которых ЭДС обмоток ротора
равны нулю или минимальны. Отклонения
этих углов от углов, теоретически
отстоящих друг от друга на
![]() ,
и составляют ошибку асимметрии. В
современных СКПТ она лежит в пределах
,
и составляют ошибку асимметрии. В
современных СКПТ она лежит в пределах![]() ;
;
3) максимальной величине остаточной ЭДС в процента от максимальной ЭДС соответствующей обмотки (0,003÷0,1%);
4) максимальной ЭДС компенсационной обмотки в процента от напряжения возбуждения (0,04÷1,2%);
5) максимальной разности коэффициентов трансформации. Она не должна превышать 0, 005÷0, 2%.
В зависимости от величины перечисленных погрешностей ПТ делятся на шесть классов точности.