

BJD_OOP_part1
.pdfГоловна центральна вісь інерції деталі
ст |
е |
аВісь обертання деталі
Головна центральна вісь інерції деталі
Вісь обертання деталі
б
Головна центральна вісь інерції деталі
тс |
е |
в |
Вісь обертання деталі |
|
Рисунок 8.1 – Види неврівноваженості: а - статична; б - моментна; в – динамічна
Всі розглянуті види неврівноваженості можуть бути усунуті балансуванням.
Балансування являє собою процес визначення числових значень і кутів дисбалансів та зменшення їх коригуванням мас. Розрізняють статичне, моментне і динамічне балансування.
При статичному балансуванні визначають і зменшують головний вектор дисбалансів в одній площині корекції. Статичне балансування можна здійснити в статичному режимі (за допомогою сил тяжіння без обертання деталі) і в динамічному режимі (при обертанні деталі), що буде більш докладно розглянуто далі.
Моментне балансування зменшує головний момент дисбалансів деталі. Воно потребує обертання деталі і обов’язково двох площин корекції.
61

Динамічну неврівноваженість усувають динамічним балансуванням у двох площинах корекції при обертанні деталі. При цьому зменшують головний вектор і головний момент дисбалансів деталі.
Із сказаного випливає, що статичне балансування є найбільш простим. Характерні деталі, які піддаються статичному балансуванню – шліфувальні круги, шківи, крильчатки вентиляторів і т. п.
Статичне балансування в динамічному режимі здійснюється методом амплітуд і методом амплітуд та фаз.
Метод амплітуд. Цей метод передбачає вимір у процесі балансування тільки амплітуди вібрації, причому для балансування необхідно зробити чотири пуски. При першому пуску вимірюють амплітуду вібрації А0 опори деталі, що обертається, обумовлену початковим дисбалансом, тобто дисбалансом самої деталі. Потім коло деталі ділять на три рівні частини (рис. 8.2).
Рисунок 8.2 – Схема до визначення дисбалансу методом амплітуд
Пробний тягарець послідовно прикріплюють у точках а, b, с і при наступних пусках вимірюють амплітуди вібрацій A1, А2, А3.
Якщо через А1 позначити найбільше з отриманих при цьому значень, а через А3 - найменше, то для виміряних амплітуд вібрацій на основі властивостей трикутників може бути записана така система рівнянь:
A2 |
A2 |
A2 |
2A A cos ; |
|
|
|
|
|
||
|
1 |
0 |
10 |
0 |
10 |
|
|
|
|
|
2 |
2 |
2 |
2A0 A20 cos( 240 |
0 |
); |
(8.3) |
||||
A2 |
A0 |
A20 |
|
|
||||||
|
2 |
2 |
2 |
2A0 A30 cos( 120 |
0 |
) |
|
|||
A3 |
A0 |
A30 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
де A10=A20=A30 – амплітуди вібрацій опори, які викликаються тільки пробним тягарцем; φ – кут між початковим дисбалансом і положенням пробного тягарця при пуску з пробним тягарцем, що дає найбільше значення амплітуди вібрацій.
62

З (8.3) можна знайти
tg |
|
3 |
(A2 A2) |
(8.4) |
|
2A2 A2 |
A2 |
||||
|
|
|
2 |
3 |
|
|
1 |
2 |
3 |
|
|
Підставляючи знайдене за (14.4) значення φ у будь-яке рівняння системи (8.3), визначають значення А10, а потім – масу потрібного коригувального тягарця
m |
|
m |
|
A0 |
(8.5) |
|
к |
пр A |
|||||
|
|
|
||||
|
|
|
10 |
|
||
де тпр – маса пробного тягарця.
Коригувальний тягарець установлюють під кутом φ-180°, відрахованим від місця найгіршої установки пробного тягарця в напрямку точки, у котрій пробний тягарець дав найкращий результат по зниженню амплітуди вібрацій.
Метод амплітуд та фаз. Цей метод передбачає одночасний вимір амплітуди і фази вібрації опори обертової деталі. При цьому достатньо здійснити два пуски: перший пуск із наявним початковим дисбалансом, другий – із пробним тягарцем.
Спочатку вимірюють амплітуду А0 і фазу φ0 вібрацій опори обертової деталі з початковим дисбалансом. Потім у довільній точці на колі деталі прикріплюють пробний тягарець масою тпр і знову вимірюють амплітуду А і фазу φвібрації опори.
Амплітуда А10 вібрації опори, яка викликається тільки пробним тягарцем, може бути визначена за теоремою косинусів (рис. 8.3):
A |
A2 |
A2 |
2A A cos( |
|
0 |
) |
(8.6) |
||
10 |
0 |
1 |
0 |
1 |
1 |
|
|
|
|
Підставляючи знайдене значення А10 у рівняння (8.5), знаходять масу коригувального тягарця, а потім – кут β, який визначає положення коригувального тягарця:
sin |
A1 |
sin( |
|
0 |
). |
(8.7) |
|
||||||
|
1 |
|
|
|
||
|
A10 |
|
|
|
|
|
Кут β відраховують від місця установки пробного тягарця.
63
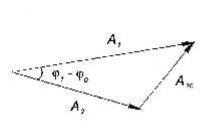
Рисунок 8.3 – Схема до визначення дисбалансу методом амплітуд і фаз
Для визначення і зменшення дисбалансів деталей використовують спеціально призначене для цих цілей устаткування – балансувальні верстати.
Балансувальні верстати поділяють на три типи: універсальні, спеціалізовані і балансувальні комплекти.
Балансувальні комплекти призначені для визначення дисбалансів деталей при балансуванні у власних підшипниках і власному корпусі без встановлення на верстат. Як балансувальні комплекти використовують вимірювальні пристрої балансувальних верстатів, вібровимірювальні прилади загального призначення і спеціальні балансувальні прилади. До останніх, зокрема, відноситься використовуваний у даній лабораторній роботі віброметр ЭВМ-БП2.
Опис лабораторної установки
У даній лабораторній роботі необхідно виконати статичне балансування в динамічному режимі ротора відцентрового вентилятора Ц4-70 № 2,5.
Для виконання необхідних при цьому вимірів використовується електричний балансувальний віброметр ЭВМ-БП2 (спрощену схему, яка пояснює принцип роботи віброметра, зображено на рис. 8.4), що складається з перетворювача 1, датчика кута 2 і вимірювального блока 3.
Перетворювач 1 (рис. 8.4) представляє собою котушку, всередині якої знаходиться підпружинений постійний магніт, який може здійснювати коливальний рух вздовж осі котушки. Перетворювач закріплюється в горизонтальному положенні на вібруючому об’єкті і здійснює коливальний рух разом із об’єктом. При цьому відбуваються перетворення механічних коливань в електричний сигнал, пропорційній віброшвидкості.
Датчик кута 2 представляє собою спеціальний контактний пристрій, який забезпечує в процесі обертання його валика замикання встановленої у ньому пари контактів, і використовується для визначення фази вібрації.
64

2
|
S R |
VD |
N S |
C |
PA |
|
1 3
Рисунок 8.4 – Спрощена схема віброметра ЗВМ-БП2:
1 – перетворювач; 2 – датчик кута; 3 – вимірювальний блок
Він закріплюється на одній осі з двигуном 4 відцентрового вентилятора (рис. 8.5). Вхідний валик датчика кута з’єднується з валом електродвигуна за допомогою спеціальної гумової трубки 5, яка виконує роль пружної муфти. Сам датчик кабелем підключаться до вимірювального блока. За допомогою спеціальної ручки датчик кута можна повертати навколо його осі, відраховуючи величину кута поворотуза спеціальною шкалою.
3 5 4
2 1
Рисунок 8.5 – Відцентровий вентилятор з встановленими перетворювачем і датчиком кута:
1 – вентилятор; 2 – перетворювач; 3 – датчик кута; 4 – двигун; 5 – гумова трубка
65

При вимірі амплітуди вібрації обидва контакти перемикача S (рис. 8.4) знаходяться в нижньому положенні, і сигнал з перетворювача надходить на інтегратор, що складається з резистора R і конденсатора С, де перетворюється з напруги, пропорційної віброшвидкості, у напругу, пропорційну віброзміщенню. Далі сигнал випрямляється діодом VD, і амплітуда вібрації вимірюється приладом РА, шкала якого градуйована в мікрометрах. При вимірі фази вібрації контакти перемикача S займають верхнє положення, і напруга з перетворювача 1 через датчик кута 2 надходить безпосередньо на вимірювальний прилад PA.
Реальна схема віброметра ЭВМ-БП2 дозволяє підключати до вимірювального блока одночасно два перетворювачі і здійснювати балансування в двох площинах, тому вона декілька складніше.
Для виміру амплітуди вібрації в групі перемикачів «Преобразователь" вимірювального блока віброметра ЭВМ-БП2 (рис. 8.6) необхідно натиснути кнопку «I» або «II» (у залежності від того, до якого гнізда вимірювального блока підключено перетворювач), у групі перемикачів «Род работы» – кнопку «Ампл.», у групі перемикачів «Пределы измер.» – кнопку, що забезпечує вибір необхідної границі виміру.
|
|
мкм |
|
1 |
4 |
2 |
3 |
Рисунок 8.6 – Вимірювальний блок віброметра ЭВМ-БП2:
1 – стрілочний прилад; 2 – група перемикачів «Преобразователь»; 3 – група перемикачів «Род работы»; 4 – група перемикачів «Пределы измер.»
Для виміру фази вібрації в групі перемикачів «Род работы» слід натиснути кнопку «Фаза» і обертанням ручки датчика кута досягти того, щоб стрілка приладу встановилася на нуль. Показ шкали датчика кута при цьому буде визначати фазу вібрації в градусах.
66
Для зручності виконання робіт із балансування крильчатки вентилятора в її маточині рівномірно по колу просвердлено і пронумеровано 36 отворів із різьбою М6. Отвори призначені для закріплення на маточині тягарців із спеціального набору.
Послідовність виконання роботи
1. Підготувати лабораторне устаткування до виконання роботи. Приєднати кабель перетворювача до гнізда "Преобразователь I" на за-
дній стінці вимірювального блока.
Якщо балансування крильчатки буде проводитися методом амплітуд і фаз приєднати кабель датчика кута до гнізда "Датчик угла" на задній стінці вимірювального блока.
Підключити вентилятор до мережі 380/220 В.
2. Виконати статичне балансування крильчатки вентилятора методом амплітуд.
Увімкнути вентилятор і виміряти амплітуду А0 горизонтальної вібрації вентилятора без пробного тягарця, тобто з наявним початковим дисбалансом.
Вимкнути вентилятор. Значення А0 записати у табл. 8.1; Виміряти амплітуди вібрації вентилятора А1, А2, А3, вкручуючи послі-
довно в різьбові отвори на маточині крильчатки вентилятора один і той же довільно вибраний з набору тягарців пробний тягарець. При цьому отвори, у які вкручується пробний тягарець, повинні бути розташовані під кутом 120° один відносно другого. Номери вибраних отворів на маточині слід запам'ятати (або записати). Значення амплітуд А1, А2, А3 (А1>А2>А3) і маси пробного тягарця записати у табл. 8.1;
Розрахувати за формулами (8.4), (8.3) і (8.5) відповідно значення кута φ, амплітуди А10 і маси mк коригувального тягарця;
Вибрати з набору тягарців тягарець з масою, найбільш близькою до розрахованої за формулою (8.5), і встановити його під кутом φ-180° по відношенню до місця найгіршої установки пробного тягарця в напрямку місця установки, у якому пробний тягарець дав найкращий результат по зниженню амплітуди вібрації. Увімкнути вентилятор і виміряти амплітуду залишкової вібрації Азал. Якщо амплітуда залишкової вібрації Азал виявиться набагато меншою за амплітуду початкової вібрації А0, то балансування проведено правильно. Вимкнути вентилятор, і зняти коригувальний тягарець.
Таблиця 8.1 – Результати експериментів по балансуванню крильчатки методом амплітуд
А0, |
mпр, |
А1, |
А2, |
А3, |
φ, |
А10, |
тк, |
Азал, |
мкм |
г |
мкм |
мкм |
мкм |
град |
мкм |
г |
мкм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
67
3. Виконати статичне балансування крильчатки вентилятора методом амплітуд і фаз.
Увімкнути вентилятор і виміряти амплітуду початкової вібрації А0. Натиснувши кнопку «Фаза» і повертаючи ручку датчика кута, домогтися, щоб показ стрілочного приладу був рівний нулю. Записати показ шкали датчика кута φ0. Вимкнути вентилятор. Результати вимірів записати у табл. 8.1.
Вкрутити в один з отворів на маточині крильчатки пробний тягарець
масою mпр.
Провести другий пуск вентилятора, виміряти амплітуду А1 і фазу φ1 вібрації вентилятора з пробним тягарцем.
Вимкнути вентилятор. Масу пробного тягарця і результати вимірів записати у табл. 8.2. Номер отвору, у який вкручується пробний тягарець, запа- м'ятати(або записати).
Розрахувати за формулами (8.6), (8.7), (8.5) значення амплітуди А10, вібрації, викликаної тільки пробним тягарцем, кута β, який визначає положення коригувального тягарця, і маси коригувального тягарця тк,.
Вибрати з набору тягарців тягарець із масою найбільш близькою до розрахованої маси коригувального тягарця і встановити його під кутом β відносно місця установки пробного тягарця. Відлік кута β слід проводити за годинниковою стрілкою, якщо кут β < 0, і проти годинникової стрілки, якщо кут β > 0.
Увімкнути вентилятор і виміряти амплітуду Азал залишкової вібрації. Якщо вона виявиться набагато меншою за амплітуду А0, то балансування проведено правильно. Вимкнути вентилятор, зняти корегувальний тягарець.
Таблиця 8.2 – Результати експериментів по балансуванню крильчатки методом амплітуд і фаз
А0, |
φ0, |
mпр, |
А1, |
φ1, |
А10, |
β, |
тк, |
Азал, |
мкм |
град |
г |
мкм |
град |
мкм |
град |
г |
мкм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4. Зробити висновок про ефективність і трудомісткість використаних у роботі методів балансування.
Контрольні питання
1.Охарактеризувати основні методи боротьби з вібрацією.
2.Основні види балансування.
3.У чому полягає метод амплітуд?
4.Який вид балансування здійснюють цим методом?
5.У чому полягає метод амплітуд і фаз?
6.Яке устаткування використовується для виконання балансування?
68

|
Література |
|
1. |
ЖидецькийВ. Ц. Основи охорони |
праці / В. Ц. Жидецький, |
В. С. Джигирей, О. В. Мельников. – Львів : Афіша, 2000. – C. 148-156. |
||
2. |
Левит М. Е. Балансировка деталей |
и узлов / М. Е. Левит, |
В. М. Рыженков. – М. : Машиностроение, 1986. |
|
|
Лабораторна робота 9 «Визначення температури спалаху горючої рідини»
Мета роботи
1.Ознайомитись з методикою оцінки пожежної небезпеки речовин.
2.Ознайомитись з обладнанням для визначення температури спалаху горючих рідин.
3.Визначити температуру спалаху досліджуваної горючої рідини.
Прилади та обладнання, що використовуються у роботі: прилад для визначення температури спалаху горючих рідин ПВНЭ, балон із скрапленим газом для живлення запалювальної лампочки приладу, лабораторний автотрансформатор, барометр, досліджувана горюча рідина.
Загальні відомості
Багато речовин і матеріалів є пожежо-і вибухонебезпечними. Для оцінкиїхньої пожежної і вибухової небезпеки використовуються спеціальні показники, що називаються показниками пожежовибухонебезпеки.
До них, зокрема, належать: група горючості, температура спалаху, температура загоряння, температура самозагоряння, нижня та верхня концентраційні межі поширення полум’я, температурні межі поширення полум’я.
За горючістю речовини і матеріали поділяються на три групи: негорючі – не здатні до горіння на повітрі; важкогорючі – здатні загорятися на повітрі від джерела запалювання, але не здатні самостійно горіти після його видалення; горючі – здатні самозагорятися, а також загорятися від джерела запалювання і самостійно горіти після його видалення.
Температура спалаху – це найменша температура конденсованої речовини, за якої в умовах спеціальних випробувань над її поверхнею утворюється пара, здатна спалахувати від зовнішнього джерела запалювання; при цьому стійке горіння не виникає.
Температура загоряння – найменша температура речовини, при якій в умовах спеціальних випробувань речовина виділяє горючі гази і пару з такою швидкістю,щопісляїхньогозапалюванняз’являєтьсястійкеполум’янегоріння.
69

Температура самозагоряння – сама низька температура речовини, при якій в умовах спеціальних випробувань різко збільшується швидкість екзотермічних реакцій, якізакінчуються полум’яним горінням.
Нижня (верхня) концентраційна межа поширення полум’я – міні-
мальний (максимальний) вміст горючої речовини в однорідній суміші з окиснювальним середовищем, за якого можливе поширення полум’я по суміші на будь-яку відстань від джерела запалювання.
Температурні межі поширення полум’я – такі температури речови-
ни, при яких її насичена пара утворює в окислювальному середовищі концентрації, рівні відповідно нижній (нижня температурна межа) і верхній (верхня температурна межа) концентраційним межам поширення полум’я.
Застосовність того чи іншого показника щодо конкретної речовини залежить від того, в якому агрегатному стані знаходиться речовина – рідкому, газоподібному, твердомуабо пилоподібному(табл. 9.1).
Таблиця 9.1 – Застосовність показників пожежо-вибухонебезпеки
|
|
|
Застосовність показника |
||
|
Показник |
пожежо-вибухонебезпеки щодо |
|||
|
газів |
рідин |
пилу |
твердих |
|
|
|
||||
|
|
речовин |
|||
|
|
|
|
|
|
1. |
Група горючості |
+ |
+ |
+ |
+ |
|
|
|
|
|
|
2. |
Температура спалаху |
– |
+ |
– |
– |
|
|
|
|
|
|
3. |
Температура загоряння |
– |
+ |
+ |
+ |
|
|
|
|
|
|
4. Температура самозагоряння |
+ |
+ |
+ |
+ |
|
|
|
|
|
|
|
5.Нижняіверхняконцентраційнімежі |
|
|
|
|
|
поширення полум’я (загоряння) |
+ |
+ |
– |
+ |
|
6.Нижняіверхнятемпературнімежі |
|
|
|
|
|
поширення полум’я(загоряння) |
– |
+ |
– |
– |
|
Примітка. Знак “+” означає, що показник застосовується, знак “–” – що показник не застосовується.
Наведені у таблиці 9.1 шість показників пожежо-вибухонебезпеки встановлені ГОСТ 12.1.044–89 “Пожарная опасность веществ и материалов. Номенклатура и методы их определения”. Всього цей стандарт встановлює 20 показників пожежо-вибухонебезпеки.
Можна зробити висновок, що показник “температура спалаху” застосовується тільки для рідин.
Визначення температури спалаху. Над вільною поверхнею рідини завжди присутня її пара, концентрація якої залежить від виду рідини, її температури і ряду інших факторів. При низьких температурах інтенсивність
70