

ЭКВИВАЛЕНТНЫЕ СХЕМЫ ПРЕОБРАЗОВАТЕЛЕЙ. РАЗЛИЧНЫЕ РЕЖИМЫ РАБОТЫ.
Сущность метода эквивалентных схем:
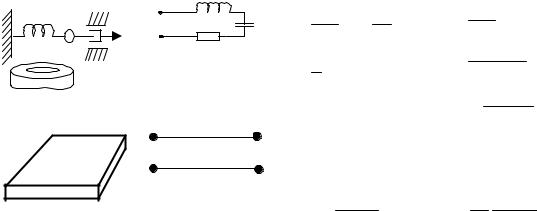
Дифференциальные уравнения, описывающие явления в преобразователе, одинаковы по своей форме с уравнениями описывающими явления в некоторой электрической схеме, называемой эквивалентной.
Использование метода электроакустических аналогий: |
|
|
|
|
||||||||||||
Механическая |
|
Эквивалентная |
Электрические |
Механические |
||||||||||||
система |
|
схема |
|
дифференциальные |
дифференциальные |
|||||||||||
|
|
|
|
|
уравнения. |
уравнения |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
движения ПКЭ |
||||
C m r |
|
U |
L |
C |
L |
d 2q |
+ R |
dq |
d 2ξ2 + |
|
|
|||||
|
|
R |
dt |
2 |
|
dt |
dt |
|
|
|
|
|||||
|
F |
|
|
|
|
|
|
1 |
|
|
|
|||||
|
|
|
|
1 q |
|
|
|
|
|
ξ |
|
|||||
|
|
|
|
+ |
= v |
|
|
|
|
|||||||
|
|
|
|
|
|
a 2 ρS11 E |
|
|||||||||
|
|
|
|
|
|
c |
|
|
|
|
|
|
d31 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
E3 |
||
|
|
|
|
|
|
|
|
|
|
|
|
aρS11 E |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
длинная |
|
|
∂ |
2 |
2v |
|
|
|
|
2 |
|
|
|
|
|
|
U |
|
|
|
= |
|
ρ |
∂ ξ2 |
|
= |
||||
|
|
|
линия |
|
|
|
|
|
||||||||
|
|
|
|
|
|
∂t |
|
|
|
|
∂е |
|
|
|||
|
|
|
|
|
|
v 2 |
|
∂ 2 v |
|
1 |
∂ 2 ξ |
|
||||
|
|
|
|
|
|
|
∂X 2 |
S |
∂X 2 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||||
Преимущества метода:
Возможность использования эффективных методов теории электрических цепей .
Правила:
1.Использование уравнений пьезоэффекта (1)-(4) и соответствующие им уравнения движения.
2.Задаются граничные условия на двух активных поверхностях
F=0 |
КЗ |
свободный элемент |
F≠0 |
ХХ |
заторможенный элемент |
3.Получают систему из трех уравнений, описывающих процессы, протекающие в преобразователе
F1 F2 U
= = ( ),* =
где F1, F2 - силы, действующие на концах пьезоэлемента, U - напряжение на электродах.
4.Составляют эквивалентную схему, имеющую две пары механических (F) и одну пару электрических (U) клемм.
5.Вводим понятие “идеальный электромеханический трансформатор”, связывающий механическую и электрическую стороны. Коэффициент трансформации:
N = |
статич .внешн.сила |
= |
F |
|
внутр.эл.напряж .заторм .эл − та(U =υ) |
υ |
|||
|
|
N - определяет величину пьезоэффекта, эффективность преобразования механической энергии в электрическую.
F - статическая внешняя сила
U - внутреннее электрическое напряжение заторможенного элемента
N 10-2-102 - порядок; [N]=Н/М.
6.Уравнения (*) сопоставляются с уравнениями для эквивалентной электрической схемы
U1 =
U2 =
U =
Откуда получаем параметры эквивалентной схемы , как коэффициенты при одинаковых переменных.
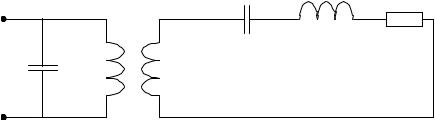
5.3.2. Эквивалентная схема ненагруженного кольца
1:N |
RM |
|
M |
C0 |
CM |
U |
|
С0 |
= ( 1 − K31 2 )Cσ - емкость заторможенного кольца, где Сσ = |
2πawε33σ |
- |
|||||||
t |
||||||||||
емкость свободного кольца; |
|
|||||||||
|
|
|||||||||
K31 коэффициент электромеханической связи; |
|
|
||||||||
а - радиус кольца; |
|
|
||||||||
w - ширина кольца; |
|
|
||||||||
ε33σ - диэлектрическая проницаемость; |
|
|
||||||||
t - толщина кольца. |
|
|
||||||||
N |
= |
2 π w d |
3 1 |
|
- коэффициент трансформации, где |
|
|
|||
|
E |
|
|
|
||||||
d31 |
|
|
S 1 1 |
|
|
|
|
|
||
- пьезомодуль; |
|
|
||||||||
s11E - упругий модуль. |
|
|
||||||||
С M = |
|
a S 1E1 |
- механическая гибкость кольца; |
|
|
|||||
|
|
|
|
2 π w t |
|
|
||||
M= 2 πa tw ρ - масса кольца.
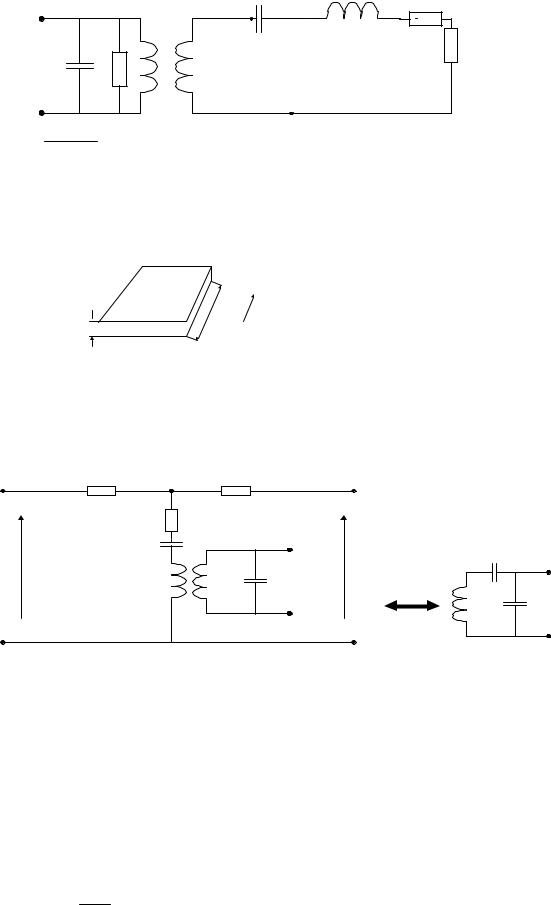
5.3.3.Эквивалентная схема нагруженного кольца
|
1:N |
|
|
|
Rп |
CM |
L |
rn |
Zs |
C0 |
|
|
|
|
U |
|
|
|
|
1
Rп = ωC0tgδ - сопротивление электрических потерь;
Z S = ( ρ c )с р еды S изл -механический импеданс нагрузки.
5.3.4. Эквивалентная схема стержня. Продольный эффект. Пьезожесткая мода.
 e t
e t 


Электрический аналог стержня - длинная линия , поэтому используется Т-образная схема замещения.
Шестиполюсник.
z1 |
z |
1 |
|
|
|
|
|
|
z2 |
|
|
-C0/N2 |
N:1 |
|
|
F1 |
|
F2 |
-C0 |
|
|
U |
|
|
|
C0 |
U |
|
|
|
C0 |
С0 = |
wt |
ε33σ ( 1 − K 332 |
) -емкость заторможенного элемента; |
|||
l |
||||||
|
С0 |
|
|
|||
- |
- |
емкость |
динамического торможения. Представляет собой |
|||
N 2 |
|
|||||
отрицательную гибкость. Означает, что реальная упругость стержня меньше его фактической упругости из-за пьезоэлектрической реакции, обусловленной совпадением электрического и механического полей.
Примечание: - появляется только при продольном эффекте.
N = |
w td 3 3 |
; |
lS 2E2 |
Z2 = −jz0 sin1kl - имеет смысл упругости
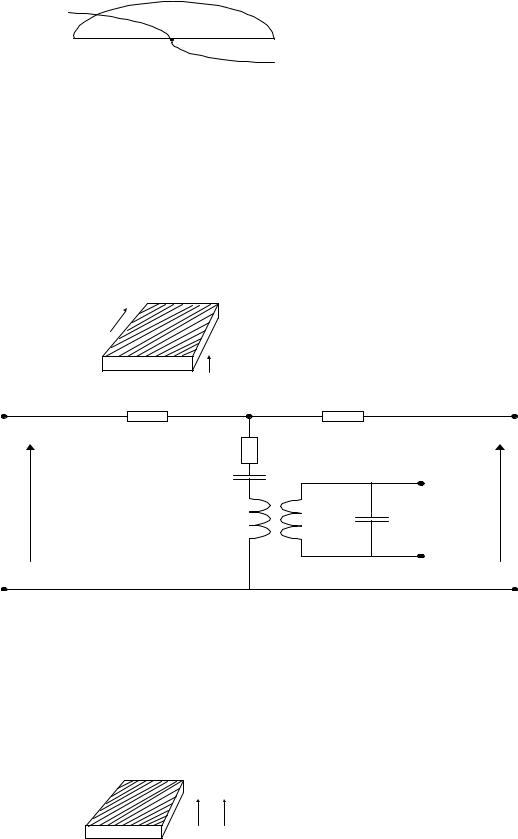
Z |
|
= − jz |
|
tg |
kl |
- представляет собой массу; |
K = |
ω |
|
1 |
0 |
2 |
v 3D |
||||||
|
|
|
|
|
Примечание: - обратить внимание на то, что масса разделена пополам по узловой линии, а гибкость сосредоточена в одном месте.
Функции sin, tg указывают на неоднозначность решения, периодичность.
Z 0 = ρv3D S п.с. - характеристический |
импеданс, где п.с.-поперечное |
сечение. |
|
S = w t - поперечное сечение в |
направлении, перпендикулярном |
колебательному движению. |
|
5.3.5.Стержень. Поперечный эффект. Пьезомягкая мода
Поперечный эффект. Пьезомягкая мода. E┴ξ
|
E3 |
|
z1 |
z |
1 |
|
|
|
|
z2 |
|
-C /N2 |
N:1 |
|
0 |
|
F2 |
F1 |
|
|
|
|
U |
|
|
C0 |
С0 |
= |
W l |
ε33σ ( 1 − K 332 ) ; |
||
|
|
|
t |
|
|
N = |
W d 3 1 |
; |
|||
|
|
S 1E1 |
|
||
Z 0 = ρv1E ( w t )
5.3.6.Колебания пластины по толщине
E3