

8.2.1. Геметрически изменяемые системы
Геометрически изменяемыми называются такие стержневые системы, перемещение узлов которых возможно при отсутствии деформаций стержней системы. Сформулируем определение для геометрически изменяемой системы, используя понятие о связи и числе степеней свободы: геометрически изменяемой называется такая стержневая система, у которой число степеней свободы больше числа связей. В технике такие системы называют механизмами. Одним из примеров геометрически изменяемой системы является пантограф, используемый на транспорте для передачи тока от контактного провода к двигателю транспортного средства (Рис.8.7).
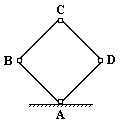
Рис.8.7. Пример геометрически изменяемой
системы в виде пантографа
Шарниры в точках А, В, С и D пантографа позволяют менять его конфигурацию в зависимости от необходимости. При этом прямые углы, образуемые элементами пантографа, изменяются, а деформации стержней пантографа не возникают.
Другим примером геометрически изменяемой системы является кривошипно-шатунный механизм (Рис.8.8).
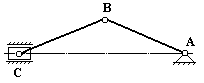
Рис.8.8. Пример геометрически изменяемой системы в виде
кривошипно-шатунного механизма
Кривошип АВ, вращаясь вокруг точки А, приводит в движение шатун ВС и вместе с ним ползун С. Если в точке В механизма приложить вертикальную силу, то ползун переместится и угол АВС изменит свою величину без возникновения деформаций в шатуне и кривошипе. Если искусственным образом ограничить перемещение ползуна С, то изображенная на рис.8.8 система перестанет быть геометрически изменяемой. Следует отметить, что геометрически изменяемые системы нельзя использовать в качестве несущих конструкций.
8.2.2. Геометрически неизменяемые системы
Геометрически неизменяемыми называются стержневые системы, перемещение узлов которых происходит только за счет деформации стержней системы или за счет смещения опор конструкции. В геометрически неизменяемой системе число степеней свободы всегда или равно числу связей или меньше числа связей. В геометрически неизменяемую систему можно превратить пантограф, изображенный на рис.8.7, если соединить узлы пантографа А и С жестким стержнем (Рис.8.9).
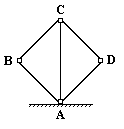
Рис.8.9. Пример геометрически неизменяемой системы
Теперь, чтобы изменить прямые углы СВА или CDA системы, нужно преодолеть сопротивление стержней системы и вызвать их деформацию.
В геометрически неизменяемую систему можно превратить и кривошипно-шатунный механизм. Для этого, как это отмечалось выше, необходимо ограничить перемещение ползуна С в горизонтальном направлении. В этом случае при приложении в узле вертикальной силы изменение угла АВС произойдет только в результате деформации элементов АВ и ВС.
Геометрически неизменяемыми являются ферма, балка и рама, изображенные соответственно на рис 8.1, 8.2, и 8.3. Число степеней свободы для этих систем либо равно числу связей (Рис.8.1.и 8.2), либо меньше числа связей (Рис.8.3). Следует отметить, что в качестве несущих конструкций в технике всегда используются только геометрически неизменяемые системы.