

6.4 План ускорений
Ускорение
точки В
равномерно вращающегося кривошипа 1
![]() =
=![]() (разд. 4),
при этом
(разд. 4),
при этом
![]() =10,47
20,1=10,96
=10,47
20,1=10,96
![]() .
.
Направлен
вектор
![]() вдоль кривошипа от точки В
к центру его вращения А.
Изображать
вдоль кривошипа от точки В
к центру его вращения А.
Изображать
![]() на плане ускорений будем вектором
на плане ускорений будем вектором![]() ,
проведенным из произвольно выбранного
полюса
в указанном выше направлении (рис. 7, в),
т.е.
,
проведенным из произвольно выбранного
полюса
в указанном выше направлении (рис. 7, в),
т.е.
![]() (стрелка надВА
показывает конкретно сторону, в которую
направлен данный вектор – от В
к А).
Приняв длину (b)=109,6 мм,
получим значение масштабного коэффициента
плана ускорений:
(стрелка надВА
показывает конкретно сторону, в которую
направлен данный вектор – от В
к А).
Приняв длину (b)=109,6 мм,
получим значение масштабного коэффициента
плана ускорений:
![]()
![]() .
.
Ускорение точки С, общей для шатуна 2, совершающего плоское движение, и для поступательно движущегося вдоль линии х-х ползуна 3, определим по векторному уравнению
![]() . (32)
. (32)
Величина
нормальной составляющей
![]() относительного ускорения
относительного ускорения
![]() будет:
будет:
![]()
![]() .
.
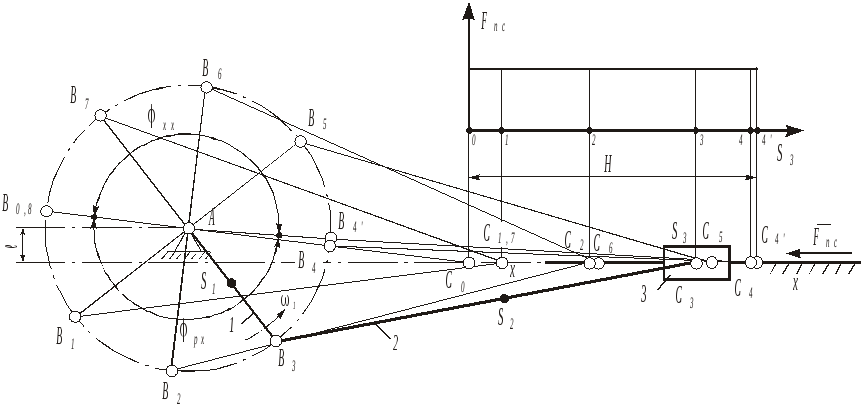
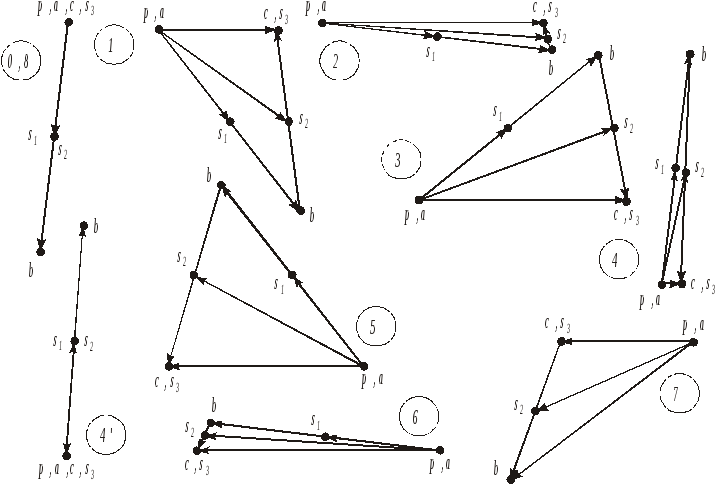
На рис. 8, а показано построение планов рассматриваемого механизма для крайних и каждого из восьми равноотстоящих (через 45) положений кривошипа при том же l.
l=410-3
F=40
![]()
![]()
V=210-2
![]()
б
а - планы положений; б - планы скоростей
Рисунок
8 - Планы положений и скоростей
кривошипно-ползунного механизма

Длину
отрезка (bn2),
изображающего на плане ускорение
![]() ,
находим из равенства
,
находим из равенства
![]() мм.
мм.
Решая графически (разд. 4) уравнение (32), получим план ускорений для заданного положения механизма.
Из плана ускорений, применяя свойство подобия, можно определить ускорения любых интересующих нас точек механизма, например:
![]()
![]() 2;
2;
![]()
![]() ;
;
![]()
![]() ;
;
![]()
![]() и
т.д.
и
т.д.
Угловое
ускорение шатуна
![]()
![]() .
.
Для
определения направления 2
мысленно переносим вектор
![]() (т.е.
(т.е.
![]() )
из плана ускорений в точку С
плана механизма и наблюдаем, в какую
сторону этот вектор стремится повернуть
звено 2
относительно условно неподвижного
центра вращения В.
Это и будет направление 2.
Из рис. 7, а
видно, что в данный момент шатун
поворачивается ускоренно, т.к. направления
2
и 2
совпадают. Угловое ускорение ползуна
2=0.
)
из плана ускорений в точку С
плана механизма и наблюдаем, в какую
сторону этот вектор стремится повернуть
звено 2
относительно условно неподвижного
центра вращения В.
Это и будет направление 2.
Из рис. 7, а
видно, что в данный момент шатун
поворачивается ускоренно, т.к. направления
2
и 2
совпадают. Угловое ускорение ползуна
2=0.
На рис. 7, в из полюса 0 построен план ускорений для нулевого положения механизма. Следует иметь в виду, что в этом случае
![]() ,
т.к. 2 0.
,
т.к. 2 0.
Здесь
![]()
![]() .
.
Поскольку
на плане механизма линии AB
и BC
совпадают, то из уравнения (32) следует,
что линии векторов
![]() и
и![]() также совпадают (см. рис. 7,в).
также совпадают (см. рис. 7,в).
Результаты вычислений кинематических характеристик для заданного и нулевого положений механизма сведены в табл. 4.
Пользуясь уравнениями (31) и (32), можно построить планы скоростей и ускорений для любого интересующего положения исследуемого механизма и определить нужные кинематические параметры.
Таблица 4 - Кинематические параметры механизма
|
Положение |
Величина | |||||||||||||||||
|
S |
1 |
2 |
VB |
VCB |
VC |
|
|
aB |
|
|
aCB |
aC |
|
|
1 |
2 |
3 | |
|
м |
|
|
|
| ||||||||||||||
|
Заданное |
0,164 |
10,47 |
-1,65 |
1,047 |
0,66 |
0,90 |
0,52 |
0,92 |
10,96 |
1,09 |
8,45 |
8,5 |
7,05 |
5,48 |
8,15 |
0 |
-21,07 |
0 |
|
Нулевое |
0 |
10,47 |
2,62 |
1,047 |
1,047 |
0 |
0,52 |
0,52 |
10,96 |
2,74 |
0,95 |
2,90 |
8,25 |
5,48 |
8,15 |
0 |
2,38 |
0 |
