

Нмб взп Нпреп. Макс. н,
где Нпреп. макс. – высота самого высокого препятствия в зоне визуального маневрирования относительно превышения аэродрома;
Н – запас высоты.
Рассчитанное значение Нмб взп округляется с точностью до 10 м в большую сторону.
Во всех случаях Нмб взп Нмб взп мин.. Значения запасов высоты Н и наименьшие возможные значения Нмб взп мин.. для категорий ВС приведены в табл. 14.3:
Табл. 14.3 -Значения запасов высоты Н и наименьшие возможные значения Нмб взп мин.
|
Категория ВС |
Запас высоты Н, м |
Наименьшие возможные значения Нмб взп мин., м |
|
А |
90 |
120 |
|
В |
90 |
150 |
|
С |
120 |
180 |
|
D |
120 |
210 |
|
E |
150 |
240 |
Зона ухода на второй круг специально для визуального маневрирования не строится.
14.4. Сектор зоны визуального маневрирования (полета по кругу), где полет по кругу не разрешен
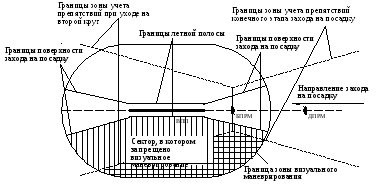
С целью уменьшения величины минимальной безопасной высоты пролета препятствий для визуального захода на посадку Нмб взп в зоне визуального маневрирования допускается выделять сектор с доминирующим препятствием.
Данный сектор ограничивается соответствующим дугами визуального маневрирования и касательными к ним, границей летного поля и соответствующими боковыми границами поверхности захода на посадку по приборам.
В качестве примера на рисункаъх 14.2 и 14.3 показаны данные сектора зоны визуального маневрирования для аэродромов с одной и двумя ВПП.
Полеты по кругу (визуальное маневрирование) в данном секторе не допускаются, о чем делается специальное предупреждение в сборниках аэронавигационной информации, и препятствия в нем могут не учитываться при определении Нмб взп.(заштрихованная область на рис. 14.2 и 14.3). При этом препятствия сектора, попадающие в зону конечного этапа захода на посадку и в зону ухода на второй круг по приборам, учитываются при определении минимальной безопасной высоты пролета препятствий для захода на посадку по приборам по соответствующему РТС посадки (рис. 14.3).
Сектор,
в котором запрещено
визуальное маневрирование
Границы
поверхности захода на посадку
Граница зоны
визуального маневрирования
Границы
летных полос






















































Границы
поверхности захода на посадку
Рис. 14.2 Пример выделения сектора, в котором запрещено визуальное маневрирование





 - зона,
в которой могут не учитываться препятствия
при определенииНмб
для визуального захода на посадку
- зона,
в которой могут не учитываться препятствия
при определенииНмб
для визуального захода на посадку
- зона, в которой учитываются препятствия при определении Нмб для захода на посадку по приборам, но могут не учитываться препятствия при определении Нмб взп
Рис. 14.3 Пример выделения зоны, в которой могут не учитываться препятствия при
Определении Нмб для визуального захода на посадку
14.5 Схема снижения и рекомендованная схема визуального захода на посадку
Снижение и заход на посадку по ППП осуществляется с помощью РТС посадки и навигации - РМС, ОСП, ОПРС (ДПРС, БПРС), VOR, VOR/DME.
Заход в зону (район) аэродрома осуществляется по установленным схемам (STAR) или по траекториям, задаваемым службой ОВД в соответствии с действующими правилами. Вход в зону визуального маневрирования независимо от расположения РТС посадки относительно ВПП представляет собой конечный этап захода на посадку по ППП, устанавливаемый в соответствии с Методикой определения минимумов для взлета и посадки ВС ГА. Это означает, что ВПП условно располагается на линии пути, проходящей через данное РТС. Таким образом:
- определяется зона конечного этапа захода на посадку применительно к конкретному типу РТС посадки (РМС, ОСП и т.д.);
- определяется минимальная безопасная высота пролета препятствий по ППП в этой зоне Нмб ппп;
- устанавливается высота, до которой разрешается снижение ВС по ППП.
При этом во всех случаях обеспечивается нахождение ВС на заданной линии пути, проходящей через РТС наведения аэродрома.
При отказе РТС посадки, использовании РСБН, диспетчерского радиолокатора для входа в зону визуального маневрирования на отечественных аэродромах ГА снижение осуществляется по ППП.
Как уже отмечалось, жесткая схема визуального захода на посадку (полета по кругу) не устанавливается, однако схема рассчитывается для каждого аэродрома как рекомендуемая для той или иной категории ВС (рекомендуемый маршрут полета).
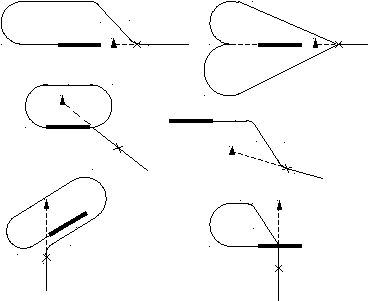
В общем случае визуальный полет в зоне визуального маневрирования осуществляется по схеме полета по кругу (желательно левый круг) или отдельным элементам этого круга. Типовые рекомендуемые схемы визуального захода на посадку показаны на рис. 14.4.
Основные элементы рекомендуемой схемы визуального захода на посадку:
а) точка начала визуального захода на посадку (ТН ВЗП) – точка в зоне визуального маневрирования, с которой собственно начинается визуальный заход (КВС устанавливает визуальный контакт с ВПП, сообщает службе ОВД готовность к визуальному заходу на посадку; служба ОВД контролирует вхождение ВС в зону визуального маневрирования, дает разрешение на визуальный заход на посадку). Высота полета в ТН ВЗП устанавливается не меньшей Нмб ппп или Нмб взп, в зависимости от того, что больше;
б) высота круга ВЗП (Нкр. взп) – высота, на которой выполняется визуальный заход по кругу. Нкр. взп устанавливается равной или большей Нмб взп:
Нкр. взп ≥ Нмб взп
с округлением до 10 м в большую сторону;
Примечание:
Е

 сли
в АIP-е
не обозначена граница ЗВП и круг полета,
то применяется стандартная ЗВП с
радиусом для данной категорию ВС, круг
полета левый.
сли
в АIP-е
не обозначена граница ЗВП и круг полета,
то применяется стандартная ЗВП с
радиусом для данной категорию ВС, круг
полета левый.З
наком обозначено вход ВС в ЗВП или начало визуального маневрирования над аэродромом.
Рис. 14.4 Виды маневров при визуальном заходе на посадку
в) ширина маршрута полета по кругу В = 2r,
где r – радиус разворота ВС данной категории,
![]() ,
,
где Vзп – скорость захода на посадку в посадочной конфигурации;
– средний угол крена при выполнении спаренного разворота;
г) длина участка прямолинейного полета при визуальном заходе на посадку до начала спаренного разворота для выхода на посадочную прямую (S). На этом участке ВС придается посадочная конфигурация;
д) высота входа в глиссаду (Нтвг);
е) удаление от порога ВПП точки входа в глиссаду (Lтвг);
ж) угол наклона глиссады (гл).
Параметры типовой схемы визуального захода на посадку в зависимости от категории ВС представлены в табл. 14.4:
Таблица 14.4 - Параметры типовой схемы ВЗП (полет по кругу)
|
Категория ВС |
Нтн взп, м |
Нкр. взп, м |
S, км |
Нтвг, м |
Lтвг, км |
гл, град. | |
|
|
Максимальная из Нмб ппп или Нмб взп |
Нкр. взп Нмб взп |
Достаточная для придания ВС посадочной конфигурации |
Нкр. взп – – Нраз. доп |
60 |
|
3 |
|
В |
80 | ||||||
|
С |
100 | ||||||
|
D |
150 (200) | ||||||
 А
А
Элементы схемы визуального захода на посадку показаны на рис. 14.5:
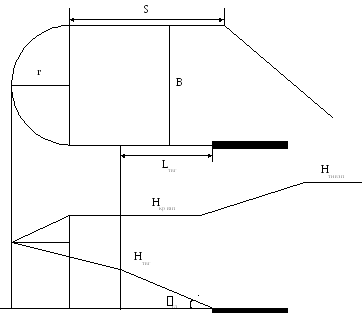
Рис. 14.5 Элементы схемы визуального захода на посадку
Численные значения этих параметров зависят от конкретных условий аэродрома (размещение и типы РТС, используемых для визуального маневрирования, значений Нмб ппп, Нмб взп) и конкретных условий полета, в первую очередь, ветрового режима при выполнении визуального захода на посадку. До начала визуального захода на посадку пилот должен знать, какой маневр он должен выполнить перед посадкой на данную полосу, и рассчитать хотя бы примерно численные значения параметров этого маневра, для того, чтобы быть уверенным в успешном выполнении визуального захода на посадку.
Нтвг – при прочих равных условиях, в том числе с учетом рекомендаций РЛЭ по допустимой вертикальной скорости снижения на спаренном развороте, должна быть достаточной для обеспечения установившегося сбалансированного полета по глиссаде перед посадкой.
Как следует из изложенного выше, в общем случае схема визуального захода предусматривает:
а) снижение в зоне визуального маневрирования от точки начала визуального захода на посадку до высоты круга ВЗП при Нмб ппп Нмб взп;
б) снижение в процессе спаренного разворота с Нкр. взп до Нтвг.