

Часть3
.pdfЗадача КЗ (тема: “Составное (сложное) движение точки”)
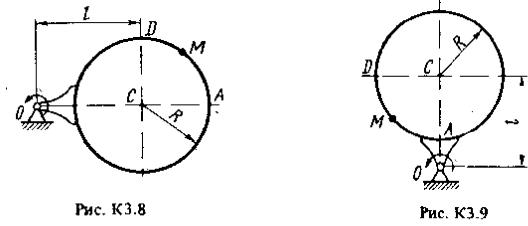
Прямоугольная пластина (рис. КЗ.0-К3.5) или круглая пластина радиусом R = 60 см (рис. К3.6-К3.9) вращается вокруг неподвижной оси по закону ϕ = f1 (t) , заданному в табл. КЗ. Положительное направление отсчета угла ϕ
показано на рисунках дуговой стрелкой. Ось вращения на рис. К3.0-К3.3 и К3.8, КЗ.9 перпендикулярна плоскости пластины и проходит через точку О (пластина вращается в своей плоскости); на рис. К3.4-К3.7 ось вращения OO1 лежит в плоскости пластины (пластина вращается в пространстве).
По пластине вдоль прямой ВD (рис. К3.0-К3.5) или по окружности радиуса R, т.е. по ободу пластины (рис. К3.6-К3.9), движется точка М. Закон ее относительного движения, выражаемый уравнением s = AM = f2 (t) (s – в
сантиметрах, t – в секундах), задан в табл. КЗ отдельно для рис. КЗ.0-К3.5 и для
рис. К3.6-К3.9, при этом для рис. К3.6-3.9 s = AM и отсчитывается по дуге окружности; там же даны размеры b и l. На всех рисунках точка M показана в положении, при котором s = AM > 0 (при s<0 точка М находится по другую сторону от точки А).
Определить абсолютную скорость и абсолютное ускорение точки М в момент времени t1 = 1с.
Указания. В задаче КЗ абсолютное (в неподвижной системе отсчета) движение точки является сложным. При решении задачи движение точки по пластине считать относительным, а вращательное движение самой пластины (подвижная система отсчета) – переносным и воспользоваться теоремами о сложении скоростей и о сложении ускорений. Прежде чем производить расчеты, следует изобразить точку М на пластине в том положении, в котором нужно определить ее абсолютную скорость (или ускорение), а не в произвольном положении, показанном на рисунках к задаче.
В случаях, относящихся к рис. К3.6-К3.9, при решении задачи не подставлять числового значения R, пока не будут определены положение точки М в момент времени t1 = 1 с и угол между радиусами СМ и СА в этот момент.
48

ϕ
ϕ
ϕ |
ϕ |
ϕ
ϕ
ϕ
ϕ
49
ϕ
ϕ
Таблица КЗ
Номер |
Для всех |
|
Рис.0-5 |
|
|
|
Рис. 6-9 |
|||
условия |
рисунков |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
ϕ = f1 (t) |
b, см |
s = AM = f2 (t) |
|
l |
|
|
|||
|
|
s = AM = f2 (t) |
||||||||
0 |
4(t 2 − t) |
16 |
60( t4 − 3t2 ) + 56 |
|
R |
π R(t 4 |
− 3t2 ) |
|||
|
|
|
|
|
|
|
3 |
|
|
|
1 |
3t 2 − 8t |
20 |
60( t3 − 2t2 ) |
|
R |
π R(t3 |
− 2t) |
|||
|
|
|
|
|
|
|
3 |
|
|
|
2 |
6t3 −12t 2 |
8 |
80( 2t2 − t3 ) − 48 |
|
R |
π R(3t − t2 ) |
||||
|
|
|
|
|
|
|
6 |
|
|
|
3 |
t 2 − 2t3 |
12 |
40( t2 − 3t ) + 32 |
|
3 |
R |
π R(t3 |
− 2t 2 ) |
||
4 |
||||||||||
|
|
|
|
|
|
2 |
|
|
||
4 |
10t 2 − 5t3 |
10 |
50( t3 − t ) − 30 |
|
R |
π R(3t 2 |
− t) |
|||
|
|
|
|
|
|
|
3 |
|
|
|
5 |
2(t 2 − t) |
12 |
50( 3t − t2 ) − 64 |
|
R |
π R(4t 2 |
− 2t3 ) |
|||
|
|
|
|
|
|
|
3 |
|
|
|
6 |
5t − 4t2 |
20 |
40( t − 2t3 ) − 40 |
|
4 |
R |
π R(t − 2t 2 ) |
|||
3 |
||||||||||
|
|
|
|
|
|
2 |
|
|
||
7 |
15t − 3t2 |
10 |
80( t2 − t ) + 40 |
|
R |
π R(2t2 |
−1) |
|||
|
|
|
|
|
|
|
3 |
|
|
|
8 |
2t3 −11t |
8 |
60( t − t3 ) + 24 |
|
R |
π R(t − 5t2 ) |
||||
|
|
|
|
|
|
|
6 |
|
|
|
9 |
6t 2 − 3t3 |
16 |
40( 3t2 − t4 ) − 32 |
|
4 |
R |
π R(2t 2 |
− t3 ) |
||
3 |
||||||||||
|
|
|
|
|
|
2 |
|
|
||
50

Перед выполнением задания прочтите по учебнику тему: «Составное (сложное) движение точки».
Обратите внимание на основные положения теории:
1.B каком случае движение точки называется составным движением (относительно данной системы отсчета)? Чем кинематически отличаются выбранные системы координат.
2.Приведите самостоятельно примеры, в которых движение точки можно рассматривать как составное.
3.Дайте определения движений точки: абсолютного, относительного, переносного.
4.Дайте определения скоростей (ускорений) точки: абсолютной скорости V
(абсолютного |
ускорения |
a ), |
относительной |
скорости |
|
|
|
|
|
Vr |
=Vотн |
||||||||
(относительного ускорения |
ar = aотн ), переносной скорости |
|
|
|
|
|
|||
Ve =Vпер |
|||||||||
(переносного |
ускорения |
ae = aпер ). Обратите |
особое внимание на |
||||||
определение переносной скорости и переносного ускорения точки.
5.Сформулируйте теорему сложения скоростей. Запишите соответствующее уравнение в векторной форме.
6.Сформулируйте теорему сложения ускорений в общем случае (теорема Кориолиса) и в частном случае. Запишите уравнения в векторной форме в обоих случаях.
7.Определение величины и направления ускорения Кориолиса aкор .
Перечислите случаи, в которых ускорение Кориолиса равно нулю. Поясните.
51

52
Составное (сложное) движение точки (краткие сведения из теории).
Движение точки называется составным, если точка участвует в двух или более движениях относительно выбранной системы отсчета. Чаще всего составным является движение точки относительно неподвижной (условно) системы отсчета. Это движение точки называется абсолютным движением, и скорость (ускорение) точки в неподвижной системе отсчета называется абсолютной скоростью V (ускорением a ) точки.
Дополнительно выбирается подвижная система отсчета (в каждой задаче есть конкретное движущееся тело, с которым ее связывают). Движение подвижной системы отсчета относительно неподвижной системы называется переносным движением точки. Абсолютная скорость (ускорение) той точки подвижного тела (с ним связана подвижная система отсчета), с которой в данный момент совпадает движущаяся по телу точка (мысленно остановили точку на
теле), называется переносной скоростью V e (ускорением ae ) точки.
Скорость (ускорение) точки в движении относительно подвижной системы отсчета называется относительной скоростью V r (ускорением ar ) точки (мысленно останавливаем движение тела).
Пример.
Капля воды стекает по лопатке рабочего колеса вращающейся турбины. Неподвижную систему отсчета свяжем со стенами машинного зала. Подвижную - с лопаткой турбины. Движение турбины (вращательное) - переносное движение капли. Движение капли по лопатке - относительное движение капли. Движение капли относительно стен - абсолютное, оно и является составным.
При вычислениях, связанных с относительным движением точки, применяется теория кинематики точки (см. задачу К1). Вычисления, связанные с переносным движением, зависят от вида движения тела, с которым перемещается подвижная система отсчета. Если движение тела поступательное или вращательное, то применяется рассмотренная выше теория (см. задачу К2). Если тело совершает составное движение, то используется теория, относящаяся к соответствующему движению тела. После выполнения упомянутых вычислений, применяется теория сложения скоростей и ускорений точки при ее сложном движении.

Теорема сложения скоростей при составном движении точки.
Формулировка теоремы |
|
Графическое нахождение |
V |
|
Аналитическое нахождение |
V |
|
|||||||||||||||||||||||||||||||||||||||||
и векторное уравнение |
|
Из векторного уравнения |
|
|
|
из векторного уравнения |
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Находим |
|
|
e , |
|
|
r |
и в соответствии с |
Находим |
|
e , |
|
r ; выбираем оси координат и |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
V |
V |
V |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
уравнением |
(1) |
строим |
векторный |
уравнение (1) проектируем на эти оси: |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
параллелограмм (или треугольник). |
|
|
|
|
|
Vx |
= Vex |
+ Vrx , |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Vy |
= Vey |
+ Vry , |
|||||||||||||||||
Абсолютная скорость |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Vz |
= Vez |
+ Vrz . |
|
|
|
|
||||||||||||||||||||||||
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
точки |
равна векторной |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
сумме |
переносной |
ско- |
|
|
|
|
|
|
|
|
|
|
|
Далее находим модуль |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
рости |
|
|
e |
точки и отно- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
сительной |
скорости |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
V |
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
или |
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|||||||||||||||||||
точки: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V = |
Vx + Vy + Vz |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и направление вектора |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
= |
|
e + |
|
r . |
(1) |
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
|
|||||||||||||||||||||||||
V |
V |
V |
|
|
|
|
|
|
|
|
|
|
Vx |
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos(V , i) = |
, |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Vy |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos(V , j) = |
|
, |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если построение выполнено в масштабе, то из |
|
|
|
|
V |
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Vz |
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
чертежа находим модуль V. Можно также |
|
|
|
cos( |
V |
, |
k |
) = |
. |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вычислить V, используя известные стороны и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
углы построенных треугольников и формулы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тригонометрии (например, теорему косинусов). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
53

54
Теорема сложения ускорений при составном движении точки (теорема Кориолиса).
Формулировка |
Графическое |
|
|
|
|
Аналитическое |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
теоремы и вектор- |
нахождение |
|
из |
нахождение a из |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ускорение Кориолиса |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
ное уравнение |
векторного урав- |
векторного уравнения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
нения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Абсолютное |
|
|
|
Находим |
|
|
e , |
|
r , |
Находим |
|
ae , |
|
ar , |
aK . |
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= 2ω V sin α , |
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
a |
a |
|
|
; |
модуль |
a |
|
где |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
K |
= 2ω ×V |
|
|
|
K |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
ускорение a |
|
|
точки |
aK . Выбираем мас- |
Выбираем |
оси |
|
|
|
ко- |
|
|
|
e |
r |
|
|
|
|
|
|
|
|
|
e r |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
в |
случае, |
|
|
когда |
штаб и в соответ- |
ординат |
и |
проекти- |
α = (ωe ,V r ) , |
ω e – модуль |
|
переносной |
угловой |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
переносное |
|
движе- |
ствии с уравнением |
руем уравнение (1) на |
скорости, Vr – модуль относительной скорости |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
ние точки не по- |
(1) строим |
|
век- |
эти оси: |
+ a |
|
|
|
|
+ a |
|
|
, |
точки. Определить направление |
aK |
|
можно двумя |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
ступательное, равно |
торный многоуголь- |
|
a |
x |
= a |
ex |
rx |
|
|
|
Kx |
способами. 1) Правило векторного произведения: |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
векторной |
|
сумме |
ник. Вектор, прове- |
|
a |
= a |
+ a |
|
|
|
+ a |
, |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
y |
ey |
ry |
|
|
|
Ky |
вектор aK |
направлен перпендикулярно плоскости |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
переносного |
|
|
уско- |
денный |
из |
начала |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
= aez |
+ arz |
|
+ aKz . |
перемножаемых векторов |
|
ω e |
и V r , в ту сторону, |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
рения |
a |
e |
|
точки, |
первого |
в |
|
конец |
|
az |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
относительного |
последнего вектора, |
|
|
|
|
Далее находим |
|
|
|
|
|
|
|
|
|
|
|
откуда |
|
кратчайший по- |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
ускорения |
|
r точки |
дает |
абсолютное |
|
|
|
|
|
модуль |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ворот |
от |
вектора |
ω |
e к |
|||||||||||||||||||||||||||||||||||||||
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
и ускорения Корио- |
ускорение |
|
|
точки. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вектору |
|
V |
r |
выглядит |
|||||||||||||||||||||||||||||||
a |
|
|
|
a = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
ax2 + a2y |
|
|
+ az2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
лиса aK : |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и направление вектора |
|
|
|
|
|
|
|
|
|
|
происходящим |
против |
|||||||||||||||||||||||||||||||||||||||||||||||
a = ae + ar + aK . (1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
хода часовой стрелки. |
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
В |
случае, |
|
|
когда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ax |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2) Правило Жуковского: |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
составляющую |
вектора |
|||||||||||||||||||||||||||||||||||
переносное |
|
движе- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos(a , i) = |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V r , |
которая перпенди- |
|||||||||||||||||||||||||||||||||||||||||
ние точки – посту- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ay |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
пательное, |
aK = 0, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
кулярна |
|
вектору |
|
ω e , |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos(a , j) = |
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
и |
a = ae + ar . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
надо повернуть на 90o в |
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
az |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сторону |
|
|
переносного |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos(a , k) |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
вращения |
|
|
– |
получим |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вектор aK . |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
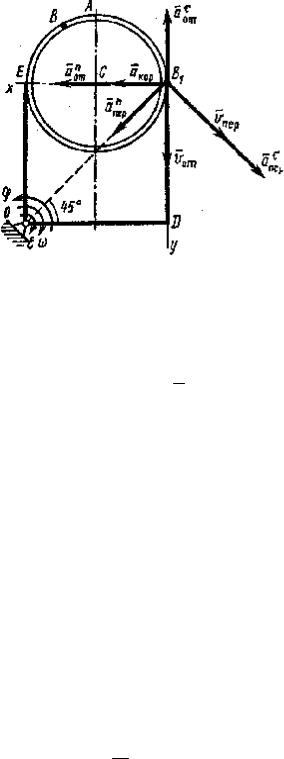
Рассмотрим два типовых примера (в примере К3а ось переносного вращения перпендикулярна пластине, в примере К3б – лежит в ее плоскости).
Пример K3a. Пластина OEAB1D (ОЕ = OD, рис. К3а) вращается вокруг оси, проходящей через точку О перпендикулярно плоскости пластины, по закону ϕ = f1(t) (положительное направление отсчета угла ϕ показано на рис. К3а дуговой стрелкой). По дуге окружности радиуса R движется точка В по
закону s = AB = f2 (t) (положительное направление отсчета координаты s на траектории – от A к В).
Дано: R = 0,5 м, ϕ = t2- 0,5t3,
s = πRcos(πt/3) (ϕ – в радианах, s – в метрах, t – в секундах).
Определить: абсолютную скорость Vабс и абсолютное ускорение аабс в момент времени t1 = 2 с.
Рис. К3а.
Решение. Рассмотрим абсолютное движение точки В как сложное, считая ее движение по дуге окружности относительным, а вращение пластины – переносным движением (подвижные оси B1xy связаны с пластиной). Тогда
абсолютная скорость Vабс и абсолютное ускорение aабс точки найдутся по формулам:
|
|
|
|
|
|
|
|
|
|
|
, a |
|
= a n |
+ a τ |
+ a n |
+ a τ |
+ a |
|
, |
(1) |
V |
абс |
= V |
отн |
+V |
|
абс |
кор |
|||||||||||||
|
|
|
|
|
пер |
|
отн |
отн |
пер |
пер |
|
|
|
|||||||
где учтено, что |
|
|
|
aотн = aотнτ |
|
aпер = aперτ |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
+ aотнn , |
+ aперn . |
|
|
|
|||||||
Определим все, входящие в равенства (1) величины.
1. Относительное движение (мысленно остановим пластину). Это движение задано естественным способом (см. задачу К1б). Закон движения точки по траектории:
|
(2) |
s = AB = pR cos(pt / 3). |
Сначала установим, где будет находиться точка В на дуге окружности в момент времени t1. Полагая в уравнении (2) t1 = 2 с, получим
s1 = πR cos(π 2 / 3) = −0,5πR.
Тогда ÐACB = sR1 = -0,5p.
55
Знак минус свидетельствует о том, что точка В в момент t1 = 2 с находится справа от точки А. Изображаем ее на рис. К3а в этом положении (точка B1).
Теперь находим числовые значения Vотн , aотнτ и aотнn :
Vотн |
= s = - |
p2 R |
|
|
τ |
& |
|
p3R |
cos(pt / 3), |
||||
|
|
|
sin(pt / 3), aотн = Vотн = - |
|
|||||||||
|
|
& |
|
|
3 |
|
|
|
|
|
9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
aотнn |
|
V 2 |
|
V 2 |
|
|
|
|
|
|
|
||
= |
отн |
|
= |
|
отн |
, |
|
|
|
|
|
||
rотн |
|
|
|
|
|
|
|||||||
|
|
|
|
R |
|
|
|
|
|
|
|
||
где ρотн - радиус кривизны |
относительной |
траектории, равный радиусу |
|||||||||||
окружности R. Для момента времени t1 = 2с, учитывая, что R = 0,5 м, получим
V |
= - |
p2 R |
sin(2p/3) = - |
p2 |
|
3 |
= -1,42 м/с, |
|
||
отн |
|
3 |
|
|
12 |
|
|
(3) |
||
|
|
|
|
|
|
|||||
|
= - p3 R cos(2p/3) = p3 |
= 0,86 м/с2 , aотнn = p4 |
||||||||
aотнτ |
= 4,06 м/с2 . |
|||||||||
|
|
9 |
36 |
|
|
24 |
|
|||
Знаки показывают, что вектор aотнτ направлен в сторону положительного |
||||||||||
|
|
|
|
в противоположную сторону; вектор a n |
||||||
отсчета координаты s, а вектор V |
отн |
|||||||||
|
|
|
|
|
|
|
|
отн |
||
направлен к центру С окружности. Изображаем все эти векторы на рис. КЗа.
2. Переносное движение (мысленно остановим точку на пластине). Это
движение (вращение) происходит по |
законуϕ = t2 - 0,5t3 (см. задачу |
К2). |
||||
Найдем угловую скорость ω и угловое ускорение e переносного вращения: |
|
|||||
ω = ϕ = 2t -1,5t |
2 |
, |
ε =ω = 2 |
- 3t |
|
|
& |
|
|
|
& |
|
|
и при t1 =2 с |
|
|
|
|
|
|
ω = -2 с-1, |
ε = -4 c-2. |
|
(4) |
|||
Знаки указывают, что в момент t1 =2 с направления ω и ε противоположны направлению положительного отсчета угла ϕ; отметим это на рис. К3а соответствующими стрелками.
Для определения Vпер и aпер найдем сначала расстояние h1 = ОВ1 точки В1
от оси вращения О. Из рисунка видно, что h1 = 2R |
|
2 |
=1,41м. Тогда в момент |
|||||||||||||||
времени t1 = 2 с, учитывая равенства (4) , получим |
|
|
|
|
|
|||||||||||||
aτ |
|
|
Vпер |
= |
|
w |
|
h1 = 2,82 м/с, |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
||||||||||||
= |
|
ε |
|
×h |
= 5,64 м/с2 , an |
= ω |
2h |
= 5,64 м/с2 . |
(5) |
|||||||||
|
|
|||||||||||||||||
пер |
|
|
|
|
1 |
|
|
|
|
|
|
пер |
|
1 |
|
|
|
|
|
|
пер и aперτ |
с учетом направления ω и ε |
|||||||||||||||
Изображаем на рис. КЗа векторы V |
||||||||||||||||||
ивектор aперn (направлен к оси вращения).
3.Ускорение Кориолиса. Модуль ускорения Кориолиса определяем по
формуле aкор = 2 Vотн × w ×sin a, где α – угол между вектором Vотн и осью вращения (вектором ω ). В нашем случае этот угол равен 90°, так как ось
56
вращения перпендикулярна плоскости пластины, в которой расположен вектор Vотн . В момент времени t1 = 2 с, учитывая, что в этот момент Vотн = 1,42 м/с и
|
ω |
|
= 2 с-1, получим |
|
||||
|
|
|
||||||
|
|
|
|
|
|
|
aкор = 5,68 м/с2 . |
(6) |
|
|
|
|
|
Направление aкор найдем по правилу Н.Е.Жуковского: так как вектор |
|||
|
|
отн лежит в плоскости, перпендикулярной оси вращения, то повернем его на |
||||||
V |
||||||||
90° в направлении |
|
, т.е. по ходу часовой стрелки. Изображаем aкор |
на рис. |
|||||
ω |
||||||||
К3а. (Иначе направление aкор можно найти, учитывая, что aкор = 2(ω ×Vотн ).) Изображаем вектор aкор на рис. К3а.
Таким образом, значения всех входящих в правые части равенств (1) векторов найдены и для определения Vабс и аабс остается только сложить эти
векторы. Произведем это сложение аналитически.
4. Определение Vабс . Проведем координатные оси В1ху (см. рис. К3а) и спроектируем почленно обе части равенства Vабс = Vотн +Vпер на эти оси.
Получим для момента времени t1 = 2 с:
Vабсх = Vотн х + Vперх = 0 −Vперсos45° = −1,99 м/с; Vабс y = Vотн y + Vперy = Vотн + Vпер cos 45° = 3,41 м/с.
После этого находим
Vабс = 
 Vабс2 х +Vабс2 у = 3,95 м/с.
Vабс2 х +Vабс2 у = 3,95 м/с.
Учитывая, что в данном случае угол между Vотн и Vпер равен 45°, значение Vабс
можно еще определить по формуле
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
= |
V |
2 |
|
+V 2 |
+ 2V |
×V ×cos45° = 3,95 м/с. |
|
||||||||||||
|
абс |
|
отн |
|
пер |
отн |
|
|
пер |
|
||||||||||||
5. Определение aабс . По теореме о сложении ускорений |
|
|||||||||||||||||||||
|
aабс = aотнτ |
+ aотнn |
+ aперτ |
+ aперn + aкор . |
(7) |
|||||||||||||||||
Для определения aабс спроектируем обе части равенства (7) на |
||||||||||||||||||||||
проведенные оси В1xy. Получим |
|
|
|
|
|
|
aперτ |
|
|
|
|
|||||||||||
|
|
aабс x |
= aотнn |
+ aкор + аперn сos45° − |
сos45°, |
|
||||||||||||||||
|
|
аабс y |
= аперn |
сos45° + |
|
aперτ |
|
сos45° − |
|
aотнτ |
|
. |
|
|||||||||
|
|
|
|
|
|
|
||||||||||||||||
Подставив сюда значения, которые все величины имеют в момент |
||||||||||||||||||||||
времени t1 = 2 с, найдем, что в этот момент aабс x = 9,74 м/с2 ; aабс у = 7,15 |
м/с2 . |
|||||||||||||||||||||
|
|
|
|
|
=12,08 м/с2 . |
|
|
|
|
|
|
|
|
|
|
|
||||||
Тогда aабс = |
aабс2 |
x + aабс2 |
y |
|
|
|
|
|
|
|
|
|
|
|
||||||||
Ответ: Vабс |
= 3,95 м/с, aабс |
= 12,08 м/с2. |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
57 |