

Поверки и юстировки |
TPS1200+ |
114 |
4.4Поверка положения оси вращения трубы (a)
Описание |
Эта поверка позволяет определить величину рассмотренной ниже инстру- |
|
|
ментальной погрешности: |
|
|
a |
Погрешность положения оси вращения трубы |
Поэтапная
поверка положения оси вращения трубы
Приведенная ниже таблица поясняет наиболее общие настройки.
Шаг Описание
До выполнения данной поверки необходимо определить величину коллимационной ошибки (c).
1.Откройте Главное меню: Инструм...\Поверки и Юстировки...
2.Меню Утилиты...\Поверки и Юстировки
Выберите Ось вращения трубы (а)
Шаг Описание
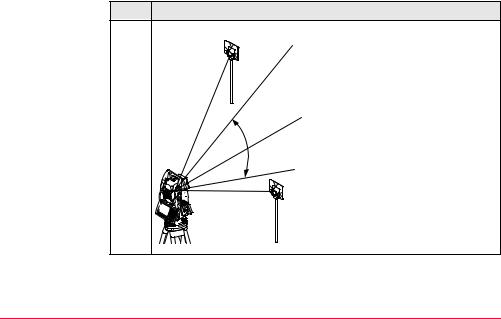
3.Поверка оси вращ. трубы I
+ 27° |
V=90° |
|
- 27°
TPS12_024a
Выполните точное наведение на отражатель, установленный на расстоянии порядка 100 метров. Линия визирования должна иметь наклон не менее 27° (30 град) относительно горизонтальной плоскости. Работу можно начать при любом круге.
Поверки и юстировки |
TPS1200+ |
115 |
Поверки и юстировки |
TPS1200+ |
116 |
Шаг Описание
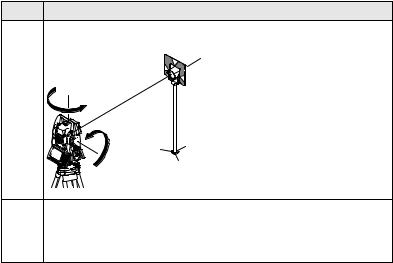
4.Нажмите на ИЗМЕР (F1) для выполнения измерений и перехода в следующее окно.
|
|
Автоматизированные тахеометры |
|
|
сами сменят круг. |
180° |
|
Смените круг вручную, если тахео- |
|
|
метр не является автоматизирован- |
|
|
ным. |
|
|
|
|
180° |
При обоих кругах точное наве- |
|
дение следует выполнять вручную. |
|
|
|
TPS12_025
5.Поверка оси вращ. трубы II
Нажмите на ИЗМЕР (F1) для выполнения измерений на ту же точку при другом круге и вычисления погрешности наклона оси вращения трубы.
Шаг Описание
Если какая-либо из погрешностей выходит за установленные пределы, то измерения нужно повторить. При этом все результаты последнего измерения будут игнорироваться и не будут использоваться при вычислении средних значений.
6.Точность юстировки
<Кол-во измерен:> Здесь показано количество выполненных приемов измерений. Каждый прием включает измерения при обоих кругах.
<σ a T-axis:> СКО определения погрешности наклона оси вращения трубы. Эти величины вычисляются, начиная со второго приема измерений.
Рекомендуется выполнять не менее двух приемов.
7.Нажмите на ИЗМЕР (F5), если нужно выполнить еще один прием. Повторите операции с шага 3.
или
на ДАЛЕЕ (F1) для подтверждения полученных результатов и перехода в окно Рез.юст.пол.оси вр.трубы. После этого будет невозможно выполнить дополнительные приемы.
Поверки и юстировки |
TPS1200+ |
117 |

Поверки и юстировки |
TPS1200+ |
118 |
||
Следующий шаг |
|
|
|
|
|
|
|
|
|
Если результаты изме- |
Смысл |
|
||
|
|
|||
|
рений должны быть |
|
|
|
|
сохранены |
|
Нажмите на ДАЛЕЕ (F1) для перезаписи старых |
|
|
|
|
значений вновь полученными. |
|
|
|
|
|
|
|
определены заново |
|
Нажатие на ПОВТ (F2) дает возможность проиг- |
|
|
|
|
норировать вновь определенные значения и |
|
|
|
|
заново провести все измерения. Обратитесь к |
|
|
|
|
шагу 3. в разделе "Поэтапная поверка положе- |
|
|
|
|
ния оси вращения трубы". |
|
|
|
|
|
|
|
|
|
|
|