

Методичка ПСА genie
.pdfДанное поле должно содержать величину, которая будет прибавляться к текущему содержимому счетчика при каждом вызове задачи, содержащей данный функциональный блок.
Поле Input from
После присоединения проводника от другого функционального блока к входу Input, данное поле будет содержать обозначение выхода блока, информация от которого будет поступать на вход данного блока.
Поле Reset from
Любой функциональный блок с дискретным выходом может осуществлять сброс содержимого счетчика и возобновление его работы. Сброс счетчика и его останов осуществляется подачей высокого уровня дискретного сигнала от другого функционального блока. Возобновление счета производится низким уровнем дискретного сигнала. Если вход Reset не присоединен, то на нем будет удерживаться фиксированное значение, равное логическому нулю.
Поле Hold from
Любой функциональный блок с дискретным выходом может приостановить работу счетчика с сохранением его содержимого. Останов счетчика осуществляется подачей высокого уровня дискретного сигнала от другого функционального блока. Возобновление счета производится низким уровнем дискретного сигнала. Если вход Hold не присоединен, то на нем будет удерживаться фиксированное значение, равное логическому нулю.
2.2.3.12. Блок аппаратного счетчика событий/ частотомера/формирователя импульсов
Данный блок обеспечивает возможность измерения количества импульсов, частоты следования импульсов и формирования последовательностей импульсов путем
взаимодействия с устройством, имеющим встроенные счетчики/таймеры, с последующей передачей измеренного значения другим функциональным блокам и/или элементам отображения стратегии. Кроме того, управление работой данного блока может
выполняться другими функциональными блоками.
Диалоговая панель настройки параметров блока аппаратного счетчика событий/частотомера/формирователя импульсов показана на рис. 2.17.
Поле Device
Щелчок левой клавишей мыши на кнопке с изображением стрелки, расположенной справа от поля Device, приведет к появлению списка всех устройств, имеющих встроенные счетчики/таймеры, драйверы и экземпляры которых установлены в системе. При этом в поле Channel содержится номер канала устройства, который будет связан с данным функциональным блоком.
31
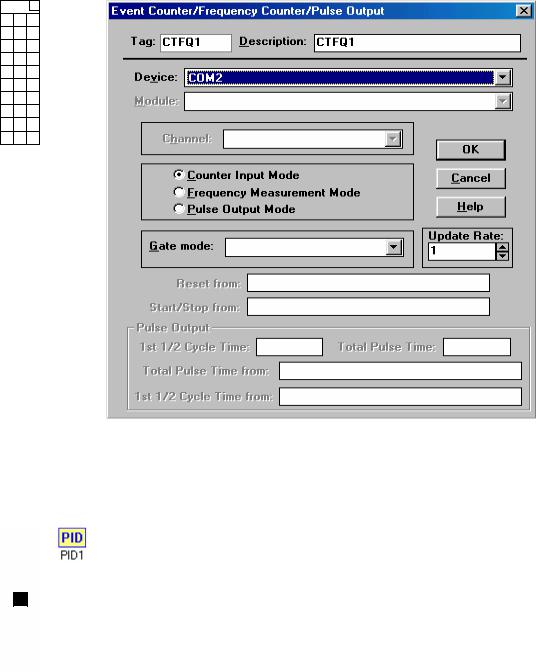
Имеется возможность выбора любого канала счетчика/таймера, входящего в состав выбранного устройства.
Рис. 2.17. Диалоговая панель настройки функционального блока аппаратного счетчика событий/частотомера/формирователя импульсов
2.2.3.13. Блок пропорционально-интегрально- дифференциального регулирования
Данный блок имеет входы и выход управления. Один из входов предназначен для ввода измеряемого значения сигнала обратной связи от объекта управления. Кроме того, по одному из входов может вводиться динамически изменяемое значение уставки
(значение стабилизации). Выход блока предназначен для выдачи сигнала регулирования, связываемого с аналоговым выходом физического устройства, который непосредственно осуществляет управление
объектом.
Краткие сведения из теории ПИД-регулятор предназначен для стабилизации заданного параметра в
контуре автоматического управления с пропорционально-интегрально- дифференциальным законом регулирования. При этом стабилизируемый параметр контролируется датчиком, выходной сигнал которого подается на вход обратной связи блока, а стабилизация указанного параметра вблизи предварительно заданного или динамически изменяемого значения выполняется выходным сигналом регулятора с использованием ряда его дополнительных параметров.
32
ПИД является одним из наиболее широко распространенных законов регулирования. Он позволяет подстраивать управляющее воздействие в соответствии с заданными постоянными времени в зависимости от динамики управляемого процесса. Указанная возможность обеспечивает столь широкое признание, которое получил пропорционально-интегрально-дифферен- циальный закон регулирования. Регулирование осуществляется путем минимизации значения рассогласования (ошибки), получаемого путем вычитания сигнала обратной связи из уставки (значения стабилизации). ПИДрегулятор является одним из наиболее эффективных типов регуляторов.
Функции управления в ПИД-регуляторе могут быть разделены в соответствии с требованиями к системе. Имеются следующие режимы управления: П-регулирование, ПИ-регулирование, ПИД-регулирование.
1)Пропорциональное регулирование
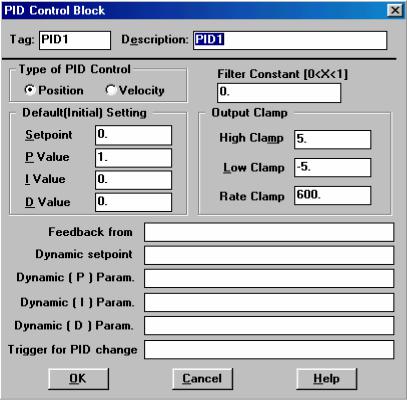
Вданном режиме выполняется простейшее пропорциональное регулирование. При этом управляющее воздействие формируется в виде разности между значением стабилизации и измеренным значением сигнала обратной связи, умноженной на коэффициент пропорциональности Р. Большему значению коэффициента пропорциональности соответствует более высокая скорость реакции регулятора. Иными словами, регулятор быстрее отрабатывает разность между уставкой и значением сигнала обратной связи. Пропорциональный регулятор может быть получен путем установки нулевых значений в полях I Value (коэффициент интегрирующего звена регулятора) и D Value (коэффициент дифференцирующего звена регулятора) диалоговой панели настройки параметров блока ПИД-регулирования (рис. 2.18).
33
Рис. 2.18. Диалоговая панель настройки функционального блока ПИД-регулирования
2) Пропорционально-интегральное регулирование
Данный алгоритм регулирования позволяет снизить погрешность регулятора за счет того, что рассогласование между регулируемым параметром и уставкой (значением стабилизации) поступает на вход интегрирующего звена регулятора и после интегрирования суммируется со значением на выходе пропорционального звена. Пропорциональноинтегральный регулятор может быть получен путем установки нулевого значения в поле D Value диалоговой панели настройки параметров блока ПИД-регулирования.
3) Пропорционально-интегрально-дифференциальное регулирование
Данный алгоритм регулирования позволяет учитывать динамику изменения регулируемого параметра путем вычисления значения и знака его производной с последующим вычитанием из значения сигнала на выходе пропорционально-интегрального звена регулятора, что обеспечивает возможность достижения минимума ошибки на выходе ПИД-регулятора за наиболее короткий интервал времени.
Переключатель Type of PID Control
На выходе блока при регулировании Position (по положению) формируется абсолютное значение управляющего воздействия, необходимое для стабилизации параметра. При регулировании Velocity (по скорости) на выходе блока формируется относительное приращение, стабилизирующее регулируемый параметр объекта управления. Например, если текущее значение стабилизируемого параметра на входе обратной связи блока равно 5, а значение управляющего воздействия на выходе ПИД-регулятора, осуществляющего регулирование по положению, равно 2, то далее стабилизируемый параметр должен стать равным 2.
Если текущее значение стабилизируемого параметра на входе обратной связи блока равно 5, а значение управляющего воздействия на выходе ПИДрегулятора, осуществляющего регулирование по скорости, равно 2, то далее стабилизируемый параметр должен стать равным 5+2=7.
Коэффициенты регулятора могут быть изменены динамически путем подачи их значений на соответствующие входы блока ПИД-регулирования от других функциональных блоков стратегии. Адаптивное регулирования будет выполняться только в том случае, когда присоединен и активен вход блока
Trigger for PID change
Поле Trigger for PID change
При использовании динамически изменяемых коэффициентов регулятора на вход Trigger for PID change следует подать сигнал высокого уровня от другого функционального блока стратегии. Иными словами, для реализации адаптивного регулирования следует подключить входы Р, D, I и Trigger for PID change к выходам других функциональных блоков стратегии.
34
При этом статические коэффициенты регулятора, заданные в соответствующих полях диалоговой панели, использоваться не будут.
Группа параметров Output Clamp
Для предотвращения выхода управляющего воздействия за пределы аппаратной шкалы канала устройства, формирующего сигнал управления, а также для простейшей фильтрации всплесков управляющего воздействия в ПИД-регулятор введен ограничитель по уровню и по скорости изменения.
Поля High Clamp и Low Clamp
Определяют верхнее и нижнее граничные значения выходного сигнала блока ПИД-регулирования.
Поле Rate Clamp
Определяет максимально допустимую скорость нарастания выходного сигнала ПИД-регулятора, измеряемую в единицах в минуту. При чрезмерно большом изменении значения сигнала обратной связи или динамической уставки, указанный параметр позволяет предотвратить формирование управляющего воздействия со скоростью, превышающей допустимую для устройства (ЦАП). В подобных случаях скорость изменения сигнала на выходе ПИД-регулятора будет равна заданной в поле Rate Clamp.
Поле Filter Constant
Данное поле может содержать коэффициент фильтрации шумов, которые могут присутствовать во входном сигнале обратной связи ПИД-регулятора. При нулевом значении в данном поле фильтрация отсутствует. При максимальном значении, равном 1,0, эффект фильтрации становится наиболее выраженным.
Поле Setpoint
Данное поле предназначено для ввода значения, которое должен иметь стабилизируемый параметр при правильном регулировании.
Поле Dinamic Setpoint
Если на данный вход блока ПИД-регулированмя подается сигнал от другого функционального блока, то уставка ПИД-регулятора будет динамически изменяться в процессе исполнения стратегии. При активизации адаптивного регулирования статические параметры регулятора будут блокированы и исключены из алгоритма управления.
2.2.3.14. Блок двухпозиционного управления
Данный блок предназначен для реализации простейшего алгоритма двухпозиционного управления и имеет вход, на который подается сигнал обратной связи от объекта управления, и 
 дискретный выход, логическое состояние которого зависит от текущего
дискретный выход, логическое состояние которого зависит от текущего
значения на входе, заданной уставки и значений порогов включения и
35
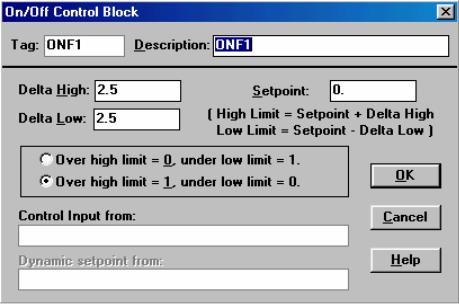
выключения. Диалоговая панель настройки параметров блока показана на рис. 2.19.
Рис. 2.19. Диалоговая панель настройки функционального блока двухпозиционного управления
Поле Setpoint
Данное поле должно содержать значение, с которым сравнивается сигнал обратной связи на входе блока. Уставка может быть фиксированной или динамически изменяемой сигналом от другого функционального блока стратегии.
Поле Delta Low
Данное поле должно содержать значение, которое определяет зону нечувствительности регулятора при формировании выходного сигнала, выключающего объект управления. Нижний предел регулирования определяется путем вычитания Delta Low (порога выключения) из значения
Setpoint (уставки).
Поле Delta High
Данное поле должно содержать значение, которое определяет зону нечувствительности регулятора при формировании выходного сигнала, включающего объект управления. Верхний предел регулирования определяется путем суммирования порога выключения и значения уставки.
Кроме того, логические состояния выходного сигнала регулятора могут быть установлены в требуемом порядке путем установки в соответствующее положение переключателя Over high limit… (Выше верхнего предела...) диалоговой панели настройки параметров блока.
36
Блок двухпозиционного управления имеет два входа (Input и Setpoint) и один дискретный выход, логическое состояние которого может быть передано другим функциональным блокам или элементам отображения стратегии.
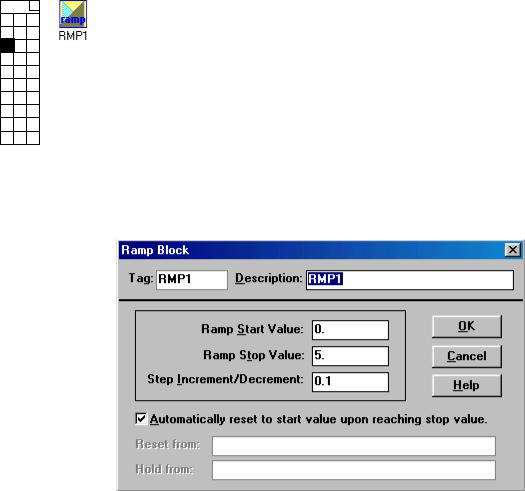
2.2.3.15. Блок формирования пилообразного сигнала
Данный блок предназначен для формирования сигнала пилообразной формы и имеет входы и выход. Выходной сигнал блока может быть сброшен в начальное значение путем подачи
дискретного сигнала высокого уровня на вход сброса от другого функционального блока стратегии. Выходной сигнал блока может быть временно зафиксирован на текущем значении путем подачи дискретного сигнала высокого уровня на вход Hold от другого функционального блока стратегии. Частота обновления значений на выходе
блока формирования пилообразного сигнала пропорциональна частоте сканирования задачи, содержащей блок. Диалоговая панель настройки параметров блока пилообразного сигнала показана на рис. 2.20.
Рис. 2.20. Диалоговая панель настройки функционального блока пилообразного сигнала
Поля Ramp Start Value и Ramp Stop Value
Данные поля определяют начальное и конечное значения пилообразного сигнала на выходе блока. Конечное значение может быть больше либо меньше начального значения.
Поле Step Increment/Decrement
Данное поле должно содержать величину, на которую будет изменяться значение на выходе блока при каждом сканировании задачи, содержащей указанный блок.
Выходной сигнал блока может быть сброшен в начальное значение путем подачи на вход Reset дискретного сигнала высокого уровня от другого функционального блока стратегии. С помощью подачи дискретного сигнала высокого уровня на вход Hold выходной сигнал блока может быть зафиксирован с сохранением текущего значения. Подача сигнала низкого
37

уровня на эти входы обеспечивает возобновление функционирования блока. Если какой-либо вход не присоединен, его состояние принимается равным логическому нулю.
2.2.3.16. Блок усреднения
Данный блок имеет вход и выход и позволяет реализовывать два метода усреднения.
Если выбран метод Moving Average (Скользящее среднее), то усреднение выполняется только для количества отсчетов сигнала на входе блока, заданного в поле Number of point to be averaged
(Количество точек для усреднения) диалоговой панели настройки параметров блока (рис. 2.21). Например, если задано 10 точек для усреднения, то в первом цикле на выходе блока появится входное значение, во втором – среднее от предыдущего и текущего, ... в десятом – среднее от входного значения на текущем и предыдущих девяти циклах, в одиннадцатом
– среднее от входного значения на текущем и предыдущих девяти циклах и т.д. Если выбран метод Whole Average (Среднее для всех выборок), то усреднение производится по общему количеству отсчетов сигнала,
поступивших на вход блока с момента запуска стратегии на исполнение.
Рис. 2.21. Диалоговая панель настройки функционального блока усреднения
Первый метод усреднения позволяет реализовать простейший алгоритм так называемой равновесовой фильтрации, при которой вклад текущего и предыдущих N отсчетов входного сигнала в текущем отсчете отклика фильтра принимается одинаковым. В ряде случаев это позволяет снизить влияние нормально распределенной помехи небольшой интенсивности.
2.2.3.17. Блок ввода данных из файла
Данный блок предназначен для ввода из файла информации, представленной в виде строк в формате ASCII, и ее передачи другим функциональным блокам стратегии. За
38
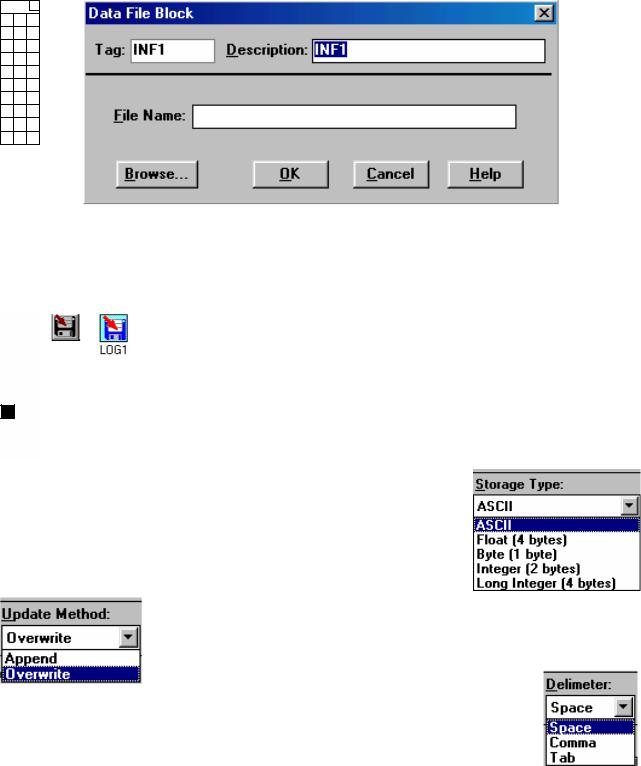
один период опроса задачи производится ввод одной строки символов. После считывания последней строки из файла, при следующем вызове задачи произойдет возврат в начало файла и возобновление ввода информации, начиная с первой строки. Файл может быть создан, например, при помощи текстового редактора и содержать данные в виде целых или действительных (с плавающей точкой) чисел в формате ASCII, расположенных в один столбец. Путь и имя файла задаются в диалоговой панели настройки параметров функционального блока (рис. 2.22), после чего следует соединить проводником блок ввода данных из файла с функциональным блокомполучателем данных.
Рис. 2.23. Диалоговая панель настройки функционального блока вывода данных из файла
2.2.3.18. Блок архивации данных
Данный блок предназначен для записи в файл информации, поступающей на его входы (до 8-ми входов) от других функциональных блоков стратегии. Информация,
сохраняемая в файле и представляемая формате ASCII, может быть размещена в восемь колонок.
Диалоговая панель настройки параметров блока архивации
данных показана на рис. 2.24. |
|
|
Поддерживаются |
следующие |
форматы хранения |
данных: ASCII, двоичный с плавающей точкой (4 байт), |
||
двоичный символьный |
(1 байт), |
двоичный целый |
(2 байт), двоичный целый двойной точности (4 байт). |
||
|
Метод обновления (Update Method) выбирается в |
|
соответствующем поле диалоговом панели и позволяет добавлять данные после последней записи (Append) или переписывать содержимое файла (Overwrite).
39
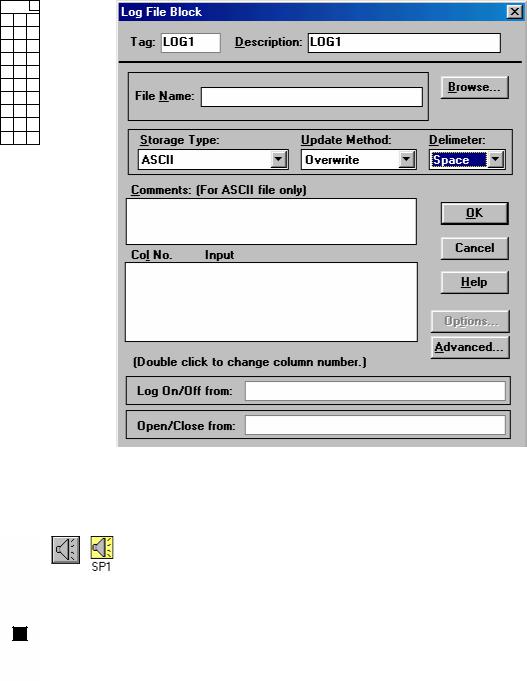
Разделитель между колонками данных может быть выбран в поле Delimeter диалоговой панели (Space – пробел, Comma – запятая, Tab – символ табуляции).
Рис. 2.23. Диалоговая панель настройки функционального блока архивации данных
2.2.3.19. Блок звуковой сигнализации
Данный блок имеет единственный вход и предназначен для формирования кратковременного звукового сигнала с помощью встроенного или внешнего динамика компьютера, на котором исполняется стратегия GENIE. В качестве блока, присоединяемого к входу блока звуковой сигнализации, может использоваться любой
функциональный блок с дискретным выходом.
40