

9.2. Система управления пч-ад при скалярном управлении с отрицательной обратной связью по скорости
Функциональная схема системы АИН-АД с отрицательной обратной связью по скорости приведена на рис. 6.
Р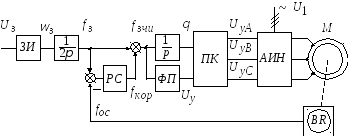 исунок
6 - Система АИН-АД с отрицательной обратной
связью по скорости
исунок
6 - Система АИН-АД с отрицательной обратной
связью по скорости
В
системе регулирования (рис. 6) питание
асинхронного двигателя осуществляется
от инвертора напряжения
![]() .
Управляющим воздействием является
частота
.
Управляющим воздействием является
частота![]() .
Задание на напряжение формируется
функциональным преобразователем
.
Задание на напряжение формируется
функциональным преобразователем
![]() .
Его передаточная функция зависит от
выбранного закона регулирования
напряжения в функции частоты.
.
Его передаточная функция зависит от
выбранного закона регулирования
напряжения в функции частоты.
Характер
изменения скорости определяется
параметрами задатчика интенсивности
![]() .
.
Система
регулирования (рис. 6) относится к классу
систем с полузамкнутым управлением.
Сигнал задания частоты складывается
из двух сигналов: собственно сигнала
задания частоты
![]() и корректирующего сигнала
и корректирующего сигнала
![]() ,
являющегося выходом регулятора скорости.
,
являющегося выходом регулятора скорости.
В
быстро протекающих процессах действует
сигнал управления заданной частоты
![]() ,
что соответствует разомкнутому
управлению. В медленных процессах
действует обратная связь по угловой
скорости, что соответствует замкнутому
управлению.
,
что соответствует разомкнутому
управлению. В медленных процессах
действует обратная связь по угловой
скорости, что соответствует замкнутому
управлению.
Сигнал корректирующей частоты определяется по выражению:
|
|
(49) |
На рис. 7 показана структурная схема модели скалярного управления скоростью асинхронного двигателя с отрицательной обратной связью по скорости. Схема реализована на блоках библиотек SimPowerSystem.
Р исунок
7 - Структурная схема модели
скалярного управления скоростью
асинхронного
двигателя с
отрицательной обратной связью по
скорости
исунок
7 - Структурная схема модели
скалярного управления скоростью
асинхронного
двигателя с
отрицательной обратной связью по
скорости
Схема модели аналогична схеме, описанной в разделе 1. Отличительные особенности схемы модели рис. 7:
отсутствуют блоки, формирующие положительную обратную связь по току,
отрицательная обратная связь по скорости с узлами суммирования и регулятором скорости (блок
 ).
).
Для работы с моделью необходимо задать:
параметры асинхронного двигателя (блок
 ),
),задание на частоту вращения
 (блок
(блок
 ),
),задание на темп изменения скорости
 (блок
(блок ),
),момент статической нагрузки (блок
 ),
),передаточную функцию регулятора скорости
 .
.
Задание параметров
асинхронного двигателя (блок
![]() ),
частоты вращения
),
частоты вращения![]() (блок
(блок
![]() ),
темпа изменения скорости
),
темпа изменения скорости
![]() (блок
(блок![]() ),
момента статической нагрузки (блок
),
момента статической нагрузки (блок![]() )
производится аналогично разделу 9.1.
)
производится аналогично разделу 9.1.
9.2.1. П-регулятор скорости
Коэффициент усиления регулятора скорости:
|
|
(50) |
 ,
,
где
![]() - число полюсов;
- число полюсов; - синхронная частота вращения ротора,
с-1;
- синхронная частота вращения ротора,
с-1;
![]() - критическое скольжение;
- критическое скольжение;![]() - суммарная малая постоянная времени
контура скорости, с;
- суммарная малая постоянная времени
контура скорости, с;![]() с - постоянная временизапаздывания
инвертора напряжения;
с - постоянная временизапаздывания
инвертора напряжения;
 - электромагнитная постоянная времени
обмоток статора и ротора, с;
- электромагнитная постоянная времени
обмоток статора и ротора, с; Вс
-коэффициент
передачи инвертора;
Вс
-коэффициент
передачи инвертора;
![]() - коэффициент передачи цепи обратной
связи по скорости;
- коэффициент передачи цепи обратной
связи по скорости;![]() - критический момент, Нм.
- критический момент, Нм.
Время моделирования,
в первом приближении, принять равным
![]() с.
с.
Выполнить
моделирование, вывести графики изменения
частоты вращения
![]() и электромагнитного момента
и электромагнитного момента![]() .
.
Определить
статическую ошибку регулирования
скорости
![]() .
.
Проанализировать
графики
![]() и
и![]() ,сделать выводы.
,сделать выводы.
9.2.2. Пи-регулятор скорости
В структурной
схеме модели (рис. 6.5) П-регулятор скорости
(блок
![]() )
заменить ПИ-регулятором скорости с
передаточной функцией:
)
заменить ПИ-регулятором скорости с
передаточной функцией:
|
|
(51) |
 ,
,
где
![]() - суммарная малая постоянная времени
контура скорости, с.
- суммарная малая постоянная времени
контура скорости, с.
Время моделирования,
в первом приближении, принять равным
![]() с.
с.
Выполнить
моделирование, вывести графики изменения
частоты вращения
![]() и электромагнитного момента
и электромагнитного момента![]() .
.
Определить
статическую ошибку регулирования
скорости
![]() .
.
Проанализировать
графики
![]() и
и![]() ,сделать выводы.
,сделать выводы.
Приложение 1
Варианты заданий к курсовой работе
|
№ |
Двигатель |
|
|
|
|
|
|
|
|
|
|
|
Момент нагрузки |
|
1 |
4А100S4 |
3.0 |
0.82 |
0.83 |
4 |
0.044 |
0.009 |
0.078 |
0.079 |
0.053 |
0.130 |
1.2 |
Постоянный |
|
2 |
4A112M4 |
5.5 |
0.86 |
0.84 |
4 |
0.036 |
0.017 |
0.064 |
0.078 |
0.041 |
0.130 |
2.8 |
Спадающий |
|
3 |
4A132S4 |
7.5 |
0.88 |
0.86 |
4 |
0.029 |
0.028 |
0.048 |
0.085 |
0.033 |
0.130 |
3.0 |
Вентиляторный |
|
4 |
4A132M4 |
11.0 |
0.88 |
0.87 |
4 |
0.028 |
0.040 |
0.043 |
0.085 |
0.032 |
0.130 |
3.2 |
Постоянный |
|
5 |
4A160S4 |
15.0 |
0.89 |
0.88 |
4 |
0.023 |
0.100 |
0.047 |
0.081 |
0.025 |
0.130 |
4.0 |
Спадающий |
|
6 |
4A160M4 |
18.5 |
0.90 |
0.88 |
4 |
0.022 |
0.130 |
0.042 |
0.085 |
0.024 |
0.130 |
4.3 |
Вентиляторный |
|
7 |
4A180S4 |
22.0 |
0.90 |
0.90 |
4 |
0.020 |
0.190 |
0.041 |
0.080 |
0.021 |
0.120 |
4.0 |
Постоянный |
|
8 |
4A180M4 |
30.0 |
0.91 |
0.89 |
4 |
0.019 |
0.230 |
0.034 |
0.088 |
0.018 |
0.120 |
3.9 |
Спадающий |
|
9 |
4A200M4 |
37.0 |
0.91 |
0.90 |
4 |
0.017 |
0.370 |
0.035 |
0.086 |
0.018 |
0.14 |
4.4 |
Вентиляторный |
|
10 |
4A200L4 |
45.0 |
0.92 |
0.90 |
4 |
0.016 |
0.450 |
0.034 |
0.082 |
0.017 |
0.14 |
4.6 |
Постоянный |
|
11 |
4A100L6 |
2.2 |
0.81 |
0.73 |
6 |
0.051 |
0.013 |
0.090 |
0.110 |
0.067 |
0.21 |
1.9 |
Спадающий |
|
12 |
4А112МA6 |
3.0 |
0.81 |
0.76 |
6 |
0.047 |
0.017 |
0.085 |
0.074 |
0.063 |
0.10 |
1.9 |
Вентиляторный |
|
13 |
4А112МВ6 |
4.0 |
0.82 |
0.81 |
6 |
0.051 |
0.021 |
0.077 |
0.073 |
0.062 |
0.110 |
2.0 |
Постоянный |
|
14 |
4А132S6 |
5.5 |
0.85 |
0.80 |
6 |
0.033 |
0.040 |
0.067 |
0.072 |
0.041 |
0.11 |
1.9 |
Спадающий |
|
15 |
4А132M6 |
7.5 |
0.86 |
0.81 |
6 |
0.032 |
0.058 |
0.060 |
0.070 |
0.040 |
0.11 |
2.1 |
Вентиляторный |
|
16 |
4А160S6 |
11.0 |
0.86 |
0.86 |
6 |
0.027 |
0.140 |
0.073 |
0.110 |
0.030 |
0.15 |
3.0 |
Постоянный |
|
17 |
4A180S6 |
16.0 |
0.88 |
0.87 |
6 |
0.024 |
0.220 |
0.062 |
0.100 |
0.028 |
0.16 |
3.0 |
Спадающий |
|
18 |
4A180M6 |
18.5 |
0.89 |
0.87 |
6 |
0.023 |
0.240 |
0.056 |
0.110 |
0.026 |
0.13 |
2.9 |
Вентиляторный |
|
19 |
4A200M6 |
22.0 |
0.92 |
0.90 |
6 |
0.022 |
0.370 |
0.050 |
0.110 |
0.024 |
0.14 |
4.1 |
Постоянный |
|
20 |
4A200L6 |
30.0 |
0.91 |
0.90 |
6 |
0.021 |
0.450 |
0.046 |
0.120 |
0.022 |
0.13 |
3.7 |
Спадающий |
|
21 |
4A112MA8 |
2.2 |
0.77 |
0.71 |
8 |
0.060 |
0.017 |
0.093 |
0.110 |
0.083 |
0.17 |
1.5 |
Вентиляторный |
|
22 |
4A112MB8 |
3.0 |
0.80 |
0.74 |
8 |
0.058 |
0.025 |
0.080 |
0.110 |
0.083 |
0.17 |
1.6 |
Постоянный |
|
23 |
4A132S8 |
4.0 |
0.83 |
0.70 |
8 |
0.061 |
0.042 |
0.068 |
0.100 |
0.058 |
0.17 |
1.6 |
Спадающий |
|
24 |
4A132M8 |
5.5 |
0.83 |
0.74 |
8 |
0.041 |
0.057 |
0.070 |
0.110 |
0.061 |
0.19 |
1.8 |
Вентиляторный |
|
№ |
Двигатель |
|
|
|
|
|
|
|
|
|
|
|
Момент нагрузки |
|
25 |
4A160S8 |
7.5 |
0.86 |
0.75 |
8 |
0.025 |
0.140 |
0.075 |
0.140 |
0.032 |
0.18 |
2.0 |
Постоянный |
|
26 |
4A160M8 |
11.0 |
0.87 |
0.75 |
8 |
0.025 |
0.180 |
0.066 |
0.130 |
0.031 |
0.18 |
2.0 |
Спадающий |
|
27 |
4A180M8 |
15.0 |
0.87 |
0.82 |
8 |
0.026 |
0.250 |
0.064 |
0.130 |
0.030 |
0.17 |
2.4 |
Вентиляторный |
|
28 |
4A200M8 |
18.5 |
0.88 |
0.84 |
8 |
0.023 |
0.400 |
0.057 |
0.130 |
0.026 |
0.18 |
2.6 |
Постоянный |
|
29 |
4A200L8 |
22.0 |
0.89 |
0.84 |
8 |
0.027 |
0.450 |
0.062 |
0.140 |
0.029 |
0.18 |
3.1 |
Спадающий |
|
30 |
4A225M8 |
30.0 |
0.91 |
0.81 |
8 |
0.018 |
0.740 |
0.045 |
0.120 |
0.022 |
0.17 |
2.3 |
Вентиляторный |
|
31 |
4A250S8 |
37.0 |
0.90 |
0.83 |
8 |
0.016 |
1.200 |
0.047 |
0.110 |
0.017 |
0.18 |
2.8 |
Постоянный |
|
32 |
4A250M8 |
45.0 |
0.91 |
0.84 |
8 |
0.014 |
1.400 |
0.037 |
0.099 |
0.016 |
0.17 |
2.6 |
Спадающий |
|
33 |
4A280S8 |
55.0 |
0.92 |
0.84 |
8 |
0.022 |
3.200 |
0.035 |
0.120 |
0.022 |
0.14 |
2.5 |
Вентиляторный |
|
34 |
4A280M8 |
75.0 |
0.93 |
0.85 |
8 |
0.022 |
4.100 |
0.028 |
0.120 |
0.021 |
0.13 |
2.6 |
Постоянный |
|
35 |
4A250S10 |
30.0 |
0.88 |
0.81 |
10 |
0.019 |
1.400 |
0.056 |
0.110 |
0.023 |
0.17 |
2.3 |
Спадающий |
|
36 |
4A280S10 |
37.0 |
0.91 |
0.78 |
10 |
0.017 |
3.600 |
0.031 |
0.110 |
0.027 |
0.15 |
2.0 |
Вентиляторный |
|
37 |
4A280M10 |
45.0 |
0.92 |
0.78 |
10 |
0.017 |
3.800 |
0.037 |
0.120 |
0.031 |
0.16 |
2.2 |
Постоянный |
|
38 |
4A315S10 |
55.0 |
0.92 |
0.79 |
10 |
0.018 |
5.200 |
0.028 |
0.100 |
0.026 |
0.14 |
2.0 |
Спадающий |
|
39 |
4A315M10 |
75.0 |
0.92 |
0.80 |
10 |
0.016 |
6.200 |
0.029 |
0.110 |
0.027 |
0.15 |
2.2 |
Вентиляторный |
|
40 |
4A355S10 |
90.0 |
0.93 |
0.83 |
10 |
0.016 |
9.300 |
0.028 |
0.120 |
0.021 |
0.16 |
3.1 |
Постоянный |
Литература
1. Башарин А.В. Управление электроприводами: учеб. пособие для студ. вузов /А.В. Башарин, В.А. Новиков, Г.Г. Соколовский, Л.: Энергоатомиздат, Ленингр. отд-ние, 1982.-392 с.
2. Браславский И.Я. Энергосберегающий асинхронный электропривод: учеб. пособие для студ. вузов /И.Я. Браславский, 3.Ш. Ишматов, В, Н. Поляков; под ред. И.Я. Браславского. М,: Издательский центр «Академия», 2004.-256 с.
3. Вешеневский С.Н. Характеристики двигателей в электроприводе /С.Н. Вешеневский, М.: Энергия, 1966.-400 с.
4. Зворыкин В.Б. Системы управления электроприводами. Модуль 2: Системы подчиненного управления. Учеб. пособие. - Днепропетровск: НМетАУ, 2008.-68 с.
5. Зворыкин В.Б. Электропривод переменного тока. Учеб. пособие.- Днепропетровск: НМетАУ, 2014.- 138 с.
6. Ключев В. И. Теория электропривода: учебник для вузов. 3-e изд. перераб. и доп. М,: Энергоатомиздат, 2001.-714 с.
7. Поздеев А.Д Электромагнитные и электромеханические процессы в частотно-регулируемых асинхронных электроприводах /А.Д. Поздеев. Чебоксары: Изд-во Чуваш. ун-та, 1998.-172 с.
8. Сабинин Ю.А. Частотно-регулируемые асинхронные электроприводы /Ю.А Сабинин, В.Л. Грузов. Л.: Энергоатомиздат, Ленинг. отд-ние, 1985.-128 с.
9. Системы подчиненного регулирования электроприводов переменного тока с вентильными преобразователями /О.В. Слежановский, Л.Х. Дацковский, И.С. Кузнецов, Е.Д. Лебедев и др. М,: Энергоатомиздат, 1983.-256 с.
10. Соколовский Г.Г. Электроприводы переменного тока с частотным управлением. /Г.Г. Соколовский. - М,: Издательский центр «Академия», 2006.-264 с.
11. Чернышев А.Ю. Электропривод переменного тока: учебное пособие /А.Ю. Чернышев, Ю.Н. Дементьев, И.А. Чернышев. – Томск: Изд-во Томского политехнического университета, 2011.-213 с.
12. Цифровые электроприводы с транзисторными преобразователями /С.Г. Герман-Галкин, В.Д. Лебедев, Б.А. Марков, Н.Г.Чичерин. Л.: Энергоатомиздат, Ленингр. отд-ние, 1986.-248 с.
13. Шрейнер Р. Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты /Р.Т. Шрейнер. Екатеринбург: УРО РАН, 2000.-654 с.
14. Шубенко В.А. Тиристорный асинхронный электропривод с фазовым управлением / В.А. Шубенко, И.Я. Браславский. М,: Энергия, 1972.-200 с.