

2. Задание на курсовой проект
Рассчитать статические и динамические характеристики асинхронного электропривода. Варианты исходных данных приведены в приложении 1.
3. Расчет параметров г-образной схемы замещения
Все двигатели,
приведенные в приложении 1, рассчитаны
на напряжение питающей сети: фазное
напряжение
![]() В,
линейное напряжение
В,
линейное напряжение![]() В.
Номинальная частота тока
В.
Номинальная частота тока![]() Гц.
Число фаз
Гц.
Число фаз![]() .
.
В приложении 1 даны следующие параметры асинхронных двигателей.
 - номинальная
мощность на валу, кВт;
- номинальная
мощность на валу, кВт; - номинальный КПД,
- номинальный КПД, - сдвиг по фазе в
номинальном режиме,
- сдвиг по фазе в
номинальном режиме, - число полюсов,
- число полюсов, - номинальное
скольжение,
- номинальное
скольжение, - момент инерции
двигателя, кГм2,
- момент инерции
двигателя, кГм2,
Параметры Г-образной упрощенной схемы замещения приводятся в относительных единицах:
 - активное
сопротивление статора,
- активное
сопротивление статора,
 - индуктивное
сопротивление рассеивания статора,
- индуктивное
сопротивление рассеивания статора, - активное
сопротивление ротора,
- активное
сопротивление ротора, - индуктивное
сопротивление рассеивания ротора,
- индуктивное
сопротивление рассеивания ротора, - индуктивное
сопротивление намагничивающего контура.
- индуктивное
сопротивление намагничивающего контура.
Параметры Г-образной схемы замещения даны в относительных единицах. Для их перевода в абсолютные единицы необходимо определить номинальный ток и базовое сопротивление:
|
|
(1) |
|
|
(2) |
 ,
А
,
А ,
Ом.
,
Ом.С учетом формулы (2.2) параметры Г-образной упрощенной схемы замещения в абсолютных единицах определятся:
|
|
(3) |
|
|
(4) |
|
|
(5) |
|
|
(6) |
|
|
(7) |
Г-образная упрощенная схема замещения в абсолютных единицах изображена на рис. 1.
Р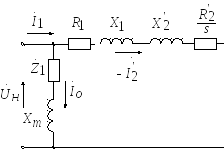 исунок
1 - Г-образная упрощенная схема замещения
в абсолютных единицах
исунок
1 - Г-образная упрощенная схема замещения
в абсолютных единицах
На рис. 1 в цепи
намагничивания показан комплекс полного
сопротивления статора
 .
.
По номинальным
данным определяются число полюсов
![]() и синхронная частота вращения
и синхронная частота вращения![]() :
:
|
|
(8) |
|
|
(9) |
 ,
,
Расчеты по формулам (1) – (9) выполнить в среде MathCad.
4. Расчет мощности, потребляемой из сети
Активная, реактивная и полная мощности, потребляемые из сети в номинальном режиме работы, определяются по формулам:
|
|
(10) |
|
|
(11) |
|
|
(12) |
Расчеты по формулам (10) – (12) выполнить в среде MathCad.
5. Расчет характерных точек механической характеристики
Механическая характеристика асинхронного двигателя (рис. 2) имеет характерные точки:
точка идеального
холостого хода
![]() ,
,
точка номинального
режима
![]() ,
,
точка критического
момента
![]() ,
,
точка минимального
момента
![]() ,
,
точка короткого
замыкания
![]() .
.
Р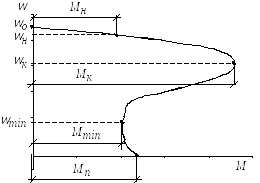 исунок
2 - Механическая характеристика
асинхронного двигателя
исунок
2 - Механическая характеристика
асинхронного двигателя
5.1. Точка идеального
холостого хода,
![]()
Частота вращения при идеальном холостом ходе рассчитывается по формуле (9):
|
|
(13) |
 ,
,
5.2. Точка номинального
режима
![]() .
.
Номинальный момент:
|
|
(14) |
 ,
Нм.
,
Нм.Номинальное скольжение, рассчитанное по параметрам схемы замещения, можно найти из выражения:
|
|
(15) |
 ,
,
где
 .
.
Положив в выражении
(15)
![]() ,
получим:
,
получим:
|
|
(16) |
 ,
,
Разрешим уравнение
(16) относительно
![]() :
:
 .
.
|
|
(17) |
 .
.Приведем уравнение (17) к каноническому виду квадратного уравнения:
|
|
(18) |
 .
.Решение квадратного уравнения (18) имеет вид:
|
|
(19) |
 .
.
Знак
![]() относится к генераторному режиму, знак
относится к генераторному режиму, знак![]() к двигательному режиму работы.
к двигательному режиму работы.
Номинальная расчетная частота вращения:
|
|
(20) |
5.3. Точка критического
момента
![]() :
:
|
|
(21) |
|
|
(22) |
|
|
(23) |
 ,
Нм;
,
Нм; ;
;
5.4. Точка минимального
момента
![]() по данным схемы замещения не рассчитывается.
Минимальный момент обусловлен влиянием
высших гармоник и вытеснением тока в
обмотке ротора. Данные факторы не
учитываются Г-образной схемой замещения.
по данным схемы замещения не рассчитывается.
Минимальный момент обусловлен влиянием
высших гармоник и вытеснением тока в
обмотке ротора. Данные факторы не
учитываются Г-образной схемой замещения.
5.5. Точка короткого
замыкания
![]() .
.
Момент при коротком
замыкании
![]() определяется по формуле (15), если в ней
положить
определяется по формуле (15), если в ней
положить![]() :
:
|
|
(24) |
 ,
Нм.
,
Нм.Расчеты по формулам (13), (14), (19) – (24) выполнить в среде MathCad.