

Варианты заданий
-
№
Тип двигуна
 ,кВт
,кВт ,В
,В ,
А
,
А ,
,об/мин
 ,
,Ом
 ,
,мГн
 ,
,кГм2
1.
2ПФ132L
7.5
220
41
2120
0.291
3.5
0.048
2.
2ПФ132L
11.0
220
58
3000
0.146
1.8
0.048
3.
2ПФ132L
5.5
440
16
1600
1.995
23.0
0.048
4.
2ПФ132L
7.5
440
20
2200
1.115
13.8
0.048
5.
2ПФ132L
11.0
440
29
3150
0.592
7.1
0.048
6.
2ПФ160L
5.6
220
33
750
0.555
10.5
0.100
7.
2ПФ160L
8.3
220
45
1000
0.391
7.0
0.100
8.
2ПФ160L
11.0
220
59
1500
0.169
3.1
0.100
9.
2ПФ160L
16.0
220
84
2360
0.075
1.4
0.100
10.
2ПФ160L
18.5
220
96
3150
0.041
0.7
0.100
11.
2ПФ160L
5.6
440
17
750
2.760
42.0
0.100
12.
2ПФ160L
8.3
440
22
1060
1.416
25.0
0.100
13.
2ПФ160L
11.0
440
30
1500
0.749
12.5
0.100
14.
2ПФ160L
16.0
440
41
2360
0.302
5.6
0.100
15.
2ПФ160L
18.5
440
48
3150
0.169
3.1
0.100
16.
2ПФ180L
10.0
220
58
750
0.348
7.3
0.230
17.
2ПФ180L
14.0
220
78
1000
0.220
4.4
0.230
18.
2ПФ180L
18.5
220
97
1500
0.109
2.2
0.230
19.
2ПФ180L
25.0
220
128
2120
0.072
0.81
0.230
20.
2ПФ180L
10.0
440
29
750
1.634
32.0
0.230
21.
2ПФ180L
14.0
440
38
1000
1.047
20.0
0.230
22.
2ПФ180L
18.5
440
48
1500
0.443
9.0
0.230
23.
2ПФ200L
30.0
220
154
1500
0.051
1.2
0.300
24.
2ПФ200L
15.0
440
41
800
0.764
18.6
0.300
Содержание отчета:
1. Наименование и цель работы.
2. Расчет параметров двигателя.
3. Структурная схема моделирования (рис. 3) с числовыми значениями коэффициентов.
4. График переходного процесса.
5. Характеристики переходного процесса.
6. АФХ, ЛАЧХ и ЛФЧХ для каждого звена.
7. Динамические оценки звеньев при гармонических воздействиях (на основании логарифмических характеристик).
8. Выводы
Лабораторная работа №4
Исследование переходных процессов в системах подчиненного регулирования, настроенных на модульный и симметричный оптимумы
Цель работы: Рассчитать регуляторы и исследовать переходные процессы в системах подчиненного регулирования, настроенных на модульный и симметричный оптимумы
Порядок выполнения работы:
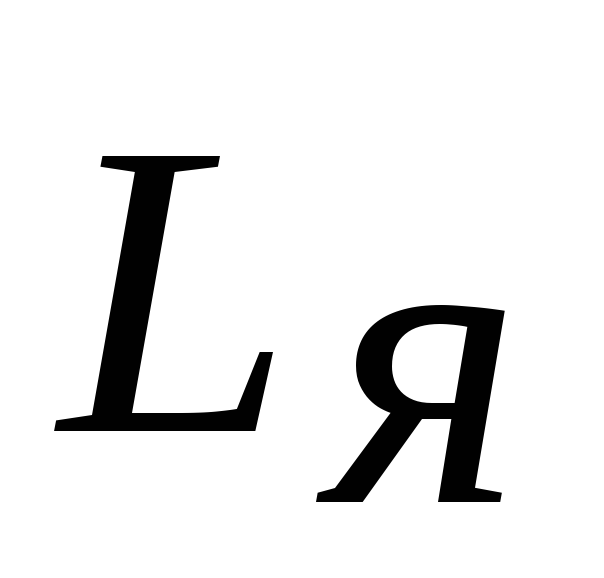
1. Рассчитать
передаточную функцию регулятора
![]() однократно интегрирующей системы
регулирования (рис. 4), при условии ее
настройки на модульный оптимум. Исходные
данные для расчета приведены в табл. 4.
однократно интегрирующей системы
регулирования (рис. 4), при условии ее
настройки на модульный оптимум. Исходные
данные для расчета приведены в табл. 4.
Р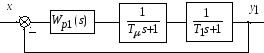 исунок
4 - Структурная схема однократно
интегрирующей
системы регулирования с интегрирующим
звеном в составе регулятора
исунок
4 - Структурная схема однократно
интегрирующей
системы регулирования с интегрирующим
звеном в составе регулятора
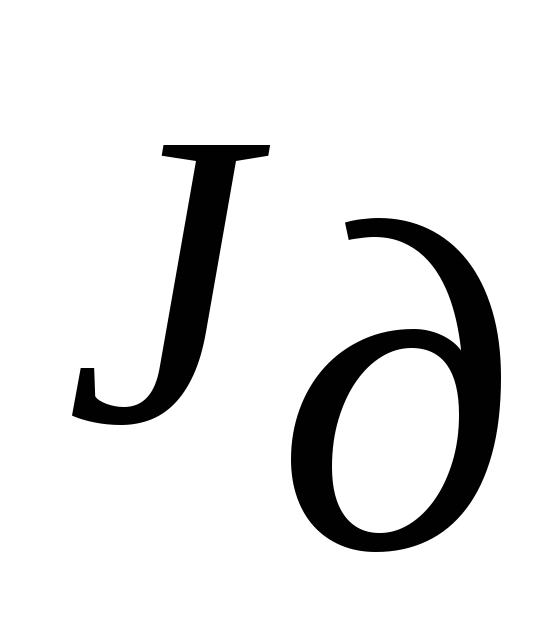
2. Рассчитать
передаточную функцию регулятора
![]() однократно интегрирующей системы
регулирования (с интегратором в объекте
регулирования) (рис. 5), при условии
ее настройки на модульный оптимум.
однократно интегрирующей системы
регулирования (с интегратором в объекте
регулирования) (рис. 5), при условии
ее настройки на модульный оптимум.
Р исунок
5 - Структурная схема однократно
интегрирующей
системы регулирования с интегрирующим
звеном в составе объекта управления
исунок
5 - Структурная схема однократно
интегрирующей
системы регулирования с интегрирующим
звеном в составе объекта управления
3. Рассчитать
передаточную функцию регулятора
![]() и фильтра
и фильтра
![]() для двукратно интегрирующей системы
регулирования (рис. 6).
для двукратно интегрирующей системы
регулирования (рис. 6).
Р исунок
6 - Структурная схема двукратно
интегрирующей системы
регулирования
исунок
6 - Структурная схема двукратно
интегрирующей системы
регулирования
4. Определить параметры типовых блоков SIMULINK, соответствующих структурной схеме модели, изображенной на рис. 7.
Р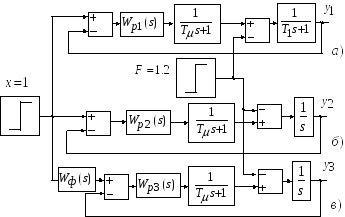 исунок
7 - Структурная схема модели системы
подчиненного регулирования при наличии
интегратора в объекте управления:
исунок
7 - Структурная схема модели системы
подчиненного регулирования при наличии
интегратора в объекте управления:
![]() -
однократно
интегрирующая
с интегратором в составе регулятора,
-
однократно
интегрирующая
с интегратором в составе регулятора,
![]() - однократно
интегрирующая
с интегратором в объекте регулирования,
- однократно
интегрирующая
с интегратором в объекте регулирования,
![]() - двукратно интегрирующая с фильтром
на входе
- двукратно интегрирующая с фильтром
на входе
5. Время
подачи возмущающего сигнала
![]() принять
равным 0.25 с.
принять
равным 0.25 с.
6. Время моделирования предварительно принять равным 0.6 с.
7. Выполнить
моделирование с выводом на одном графике
управляющего сигнала
![]() ,
возмущающего
сигнала
,
возмущающего
сигнала
![]() и всех выходных переменных
и всех выходных переменных
![]() .
.
8. Для каждой из
выходных переменных
![]() определить характеристики переходных
функций: перерегулирование
определить характеристики переходных
функций: перерегулирование
![]() ,
время первого достижения установившегося
значения
,
время первого достижения установившегося
значения
![]() ,
время регулирования
,
время регулирования
![]() ,
статическую ошибку регулирования по
управлению
,
статическую ошибку регулирования по
управлению
![]() и по возмущению
и по возмущению
![]() .
.
9. Проанализировать полученные результаты, сделать выводы.
10. Результаты работы оформить в виде отчета.
|
|
Таблица 9.1 |
Варианты заданий
-
№
 ,
с
,
с ,
с
,
с№
 ,
с
,
с ,
с
,
с1.
0.008
0.02
13.
0.008
0.03
2.
0.009
0.03
14.
0.009
0.04
3.
0.010
0.04
15.
0.010
0.03
4.
0.007
0.04
16.
0.007
0.02
5.
0.010
0.03
17.
0.010
0.05
6.
0.008
0.02
18.
0.008
0.04
7.
0.010
0.04
19.
0.010
0.02
8.
0.009
0.03
20.
0.009
0.05
9.
0.007
0.02
21.
0.007
0.04
10.
0.011
0.04
22.
0.011
0.05
11.
0.009
0.03
23.
0.009
0.02
12.
0.007
0.02
24.
0.007
0.03
Содержание отчета:
1. Наименование и цель работы.
2. Расчеты по пунктам 1-6.
3. Структурные схемы однократно и двукратно интегрирующих систем регулирования (рис. 4, 5, 6) с числовыми значениями коэффициентов.
4. Структурная схема модели системы регулирования (рис. 7) с числовыми значениями коэффициентов.
5. Графики переходных функций.
6. Характеристики переходных функций.
7. Выводы.
Лабораторная работа №5
Расчет регуляторов и моделирование системы заполнения бака водой
Цель работы:
-
рассчитать параметры системы,
-
рассчитать регуляторы,
-
исследовать переходные процессы в системе автоматического заполнения бака водой
Порядок выполнения работы:
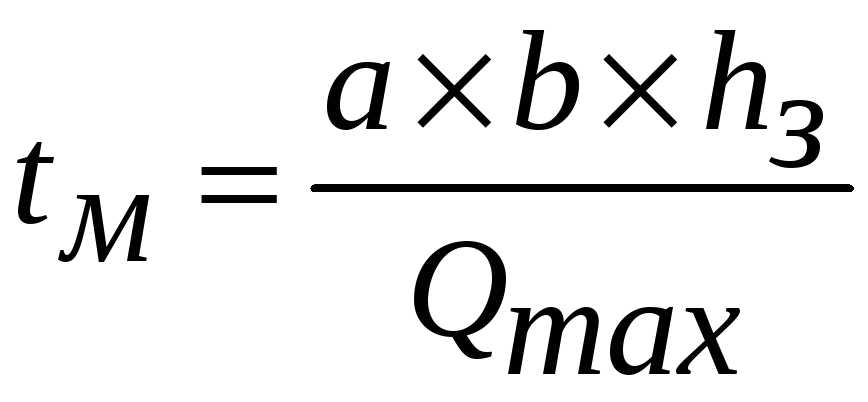
1. В соответствии
с вариантом задания (табл. 5) рассчитать
передаточные функции модели системы и
параметры регуляторов положения задвижки
и заполнения бака. При выполнении
расчетов углы поворота задвижки задаются
в радианах. Перемещение задвижки из
нулевого положения к полному открытию
должно осуществляться за время
![]() .
.
2. Собрать структурную схему модели контура регулирования положения задвижки (рис. 8).
Р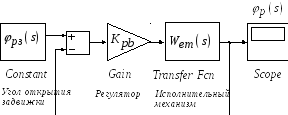 исунок
8 - Структурная схема модели оптимизированной
системы управления положением задвижки
исунок
8 - Структурная схема модели оптимизированной
системы управления положением задвижки
3. Время
моделирования
предварительно принять равным
![]() .
.
4, Выполнить
моделирование системы, подав на вход
значение угла
![]() в радианах.
в радианах.
5. Построить графики
переходного процесса
![]() ,
,
![]() .
.
6. Определить показатели качества переходного процесса открытия задвижки.
7. Собрать структурную схему модели системы заполнения бака водой с ограничением угла поворота задвижки (рис. 9).
Р![]()
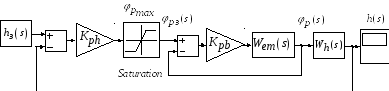 исунок
9 - Структурная схема модели
системы
заполнения бака водой с ограничением
угла поворота задвижки
исунок
9 - Структурная схема модели
системы
заполнения бака водой с ограничением
угла поворота задвижки
8. При
задании ограничений в блоке
![]() значения
значения
![]() вводятся в радианах.
вводятся в радианах.
9. Время моделирования предварительно принять равным:
 .
.
10. Выполнить
моделирование системы заполнения бака
(рис. 10.16), подав на вход системы сигнал,
соответствующий необходимому уровню
воды в баке
![]() .
.
11. Построить графики
переходного процесса
![]() ,
,
![]() ,
,
![]() .
.
12. Определить показатели качества переходного процесса заполнения бака водой.
13. По полученным результатам сделать выводы.
14. Результаты работы оформить в виде отчета.