

LR1.1-1
.3.pdfМІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
ОДЕСЬКА НАЦІОНАЛЬНА МОРСЬКА АКАДЕМІЯ Кафедра фізики і хімії
ЛАБОРАТОРНІ РОБОТИ
№1.1 ВИЗНАЧЕННЯ ВЛАСНОГО МОМЕНТУ ІНЕРЦІЇ ОДНОРІДНОГО ДИСКА
№1.2 ВИЗНАЧЕННЯ МОМЕНТУ ІНЕРЦІЇ ВЕЛОСИПЕДНОГО КОЛЕСА
№1.3 ВИЗНАЧЕННЯ МОМЕНТУ ІНЕРЦІЇ КОЛЕСА МЕТОДОМ КОЛИВАНЬ
(Вказівки до лабораторних робіт)
Склав проф. Михайленко В.І.
Затверджено на засіданні кафедри,
протокол № 4, 16.02.2011 р.
Одеса - 2011
2
Лабораторна робота № 1.1
ВИЗНАЧЕННЯ ВЛАСНОГО МОМЕНТУ ІНЕРЦІЇ ОДНОРІДНОГО ДИСКА
1. ТЕОРЕТИЧНА ЧАСТИНА
1.1 Аналогія між поступальним та обертальним рухом
Поступальний рух |
Обертальний рух |
|
1. Поступальним назива- |
1. Обертальним називається такий рух, |
|
ється такий рух, при якому |
при якому всі точки тіла описують кола, |
|
всі точки тіла описують од- |
центри яких лежать на одній і тій же |
|
накові за формою траєкто- |
прямій (осі обертання). |
|
рії. |
|
|
2. Шлях S– це довжина ді- |
2. Кут φ, що описує радіус-вектор за |
|
лянки траєкторії. |
деякий час. |
|
3. Лінійна швидкість чисе- |
3. Кутова швидкість чисельно дорівнює |
|
льно дорівнює шляху, |
куту повороту радіуса-вектора за оди- |
|
пройденому матеріальною |
ницю часу. Вона визначається як перша |
|
точкою за одиницю часу. |
похідна від кута повороту за часом |
|
Вона визначається як пе- |
d |
|
рша похідна від шляху за |
dt |
|
часом |
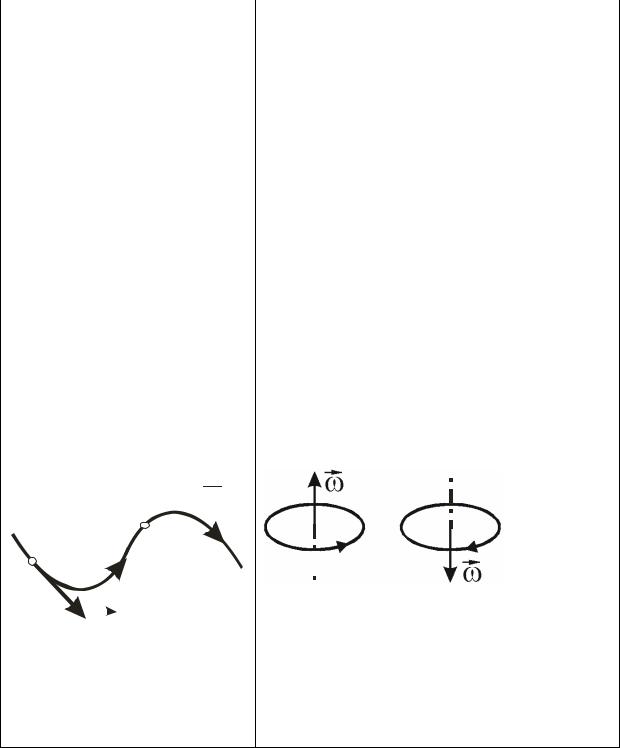
Вектор кутової швидкості знаходиться |
|
dS |
за правилом правого свердлика: необ- |
|
v dt |
хідно встановити свердлик вздовж осі |
|
Вектор лінійної швидкості |
обертання і крутити його в напрямку |
|
збігається з дотичною в |
обертання; тоді поступальний рух све- |
|
даній точці траєкторії і на- |
рдлика вкаже на напрямок кутової шви- |
|
правлений в сторону руху |
дкості ( рис.1а). |
|
(рис.1). |
|
|
|
|
|
 v
v
|
|
|
|
Рис.1.1а |
|
|
|
|
|
||
|
|
|
|
||
|
|
|
|
||
v |
|||||
Зауважимо, що вектор завжди збіга- |
|||||
|
Рис.1.1 |
ється з віссю обертання. |
|||
4. Лінійне прискорення чи- |
4. Кутове прискорення чисельно дорів- |
||||
сельно дорівнює зміні |
нює зміні кутової швидкості за одиницю |
||||
швидкості за одиницю ча- |
часу. Воно визначається як перша похі- |
||||
су. Воно визначається як |
дна від кутової швидкості за часом |
||||
|
|
|
|
3 |
|
|
|
|
|||
перша похідна від швидко- |
|
d |
|||
сті за часом |
|
dv |
|
dt |
|
|
|
|
Приклад. Тіло обертається за законом |
||
|
a dt |
3t3 |
4t2 2t 4 , – в радіанах, t – в |
||
Приклад. Матеріальна то- |
с. Знайти значення кутової швидкості і |
||||
чка рухається за законом |
кутового прискорення в момент часу |
||||
S 4t3 3t2 4t 5, S– в м, |
t 2c . |
|
|||
t – в с. Знайти значення |
Розв’язання: |
||||
швидкості і прискорення в |
d |
9t2 8t 2; |
|||
момент часу t 2c |
dt |
|
|||
Розв’язання: |
|
d |
18t 8 |
||
dS |
|
2 |
|
||
v dt |
12t |
6t 4; |
dt |
|
|
|
Приt 2c |
||||
a dv |
|
|
|
||
24t 6 |
9 22 8 2 2 22 рад/с; |
||||
dt |
|
|
|
18 2 8 28 рад/с2. |
|
Приt 2 c |
|
|
|||
v 12 22 6 2 4 40 м/с |
|
|
|||
a 24 2 6 42 м/с2 |
|
|
|||
Властивість тіл зберігати |
Властивість тіл зберігати стан спокою |
||||
стан спокою або рівномір- |
або рівномірного обертального руху на- |
||||
ного прямолінійного руху |
зивається інертністю. |
||||
називається інертністю. |
Момент інерції (I) – міра інертності тіла |
||||
Маса (m) – міра інертності |
при обертальному русі. |
||||
тіла при поступальному |
Момент інерції залежить від маси та |
||||
русі. |
|
|
|
форми тіла, а також від вибору осі обе- |
|
|
|
|
|
ртання. |
|
|
|
|
|
Момент інерції матеріальної точки |
|
|
|
|
|
визначається як добуток маси точки на |
|
|
|
|
|
квадрат відстані до осі обертання: |
|
|
|
|
|
|
I mr2 |
|
|
|
|
В загальному випадку момент інерції |
|
|
|
|
|
тіла довільної форми знаходять за фо- |
|
|
|
|
|
рмулою |
|
|
|
|
|
|
N |
|
|
|
|
|
I miri2 , |
|
|
|
|
|
i 1 |
|
|
|
|
де N – кількість матеріальних точок, на |
|
|
|
|
|
яке розбивається тіло. Момент інерції |
|
|
|
|
|
тонкого кільця, удвічі більший моменту |
|
|
|
|
|
інерції суцільного диска (рис.2): |
|
4
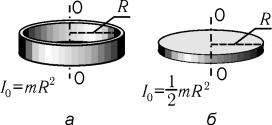 Рис.1.2
Рис.1.2
Вісь обертання, що проходить через центр мас тіла, називається власною віссю. Момент інерції відносно власної осі називається власним моментом інерції.
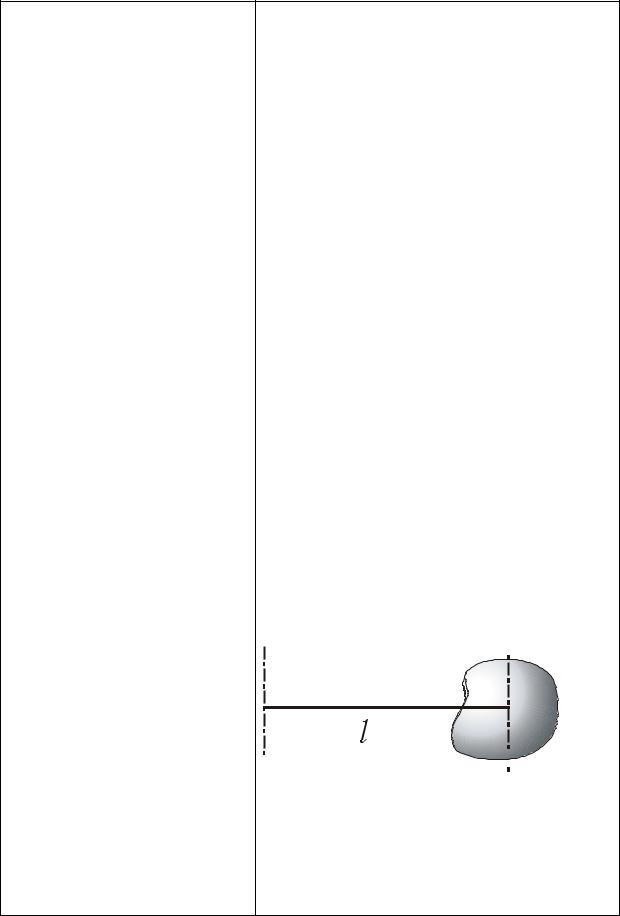
Момент інерції відносно довільної осі, паралельній осі власного обертання, можна розрахувати за допомогою теореми Штейнера: момент інерції ті-
ла відносно довільної осі, паралельній власній осі, дорівнює власному моменту інерції плюс добуток маси тіла на квадрат відстані між осями:
I I0 ml2 , |
(3) |
де I0 - власний момент інерції, тобто момент інерції відносно осі СС (рис. 1.3), а I - момент інерції відносно осі ОО.
O |
|
C |
|
||
|
|
O |
|
C |
|
|
||
|
|
||
|
|
||
|
|
||
|
|
|
|
|
|
Рис.1.3 |
|
Сила – міра взаємодії тіл, |
Момент сили – це добуток сили на пле- |
||
внаслідок чого появляєть- |
че: M F l. Плече сили – це довжина |
||
ся прискорення або дефо- |
перпендикуляра, опущеного з осі обер- |
||
рмація. |
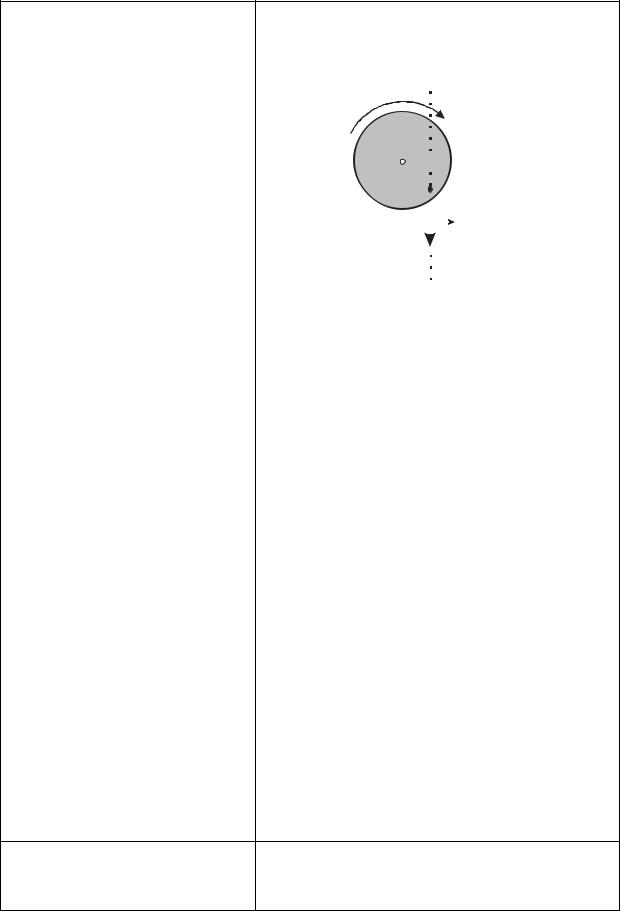
тання на лінію дії сили (рис. 1.4). |
||
|
Момент сили – вектор, напрямок якого |
||
5
встановлюється за правилом свердлика. В даному випадку (рис.1.4) вектор
M направлений вздовж осі О за площину рисунка.
|
|
|
|
|
|
|
O |
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
Рис.1.4. |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
||||||||||
Добуток сили на час її дії – |
Добуток моменту сили на час його дії – |
||||||||||||
F dt називається імпуль- |
M dt називається імпульсом моменту |
||||||||||||
сом сили. |
|
|
|
|
сили. |
|
|
|
|||||
Добуток маси тіла на його |
Добуток моменту інерції на кутову шви- |
||||||||||||
швидкість – mv називаєть- |
дкість – I називається моментом ім- |
||||||||||||
ся імпульсом тіла. |
|
пульсу тіла. |
|
|
|
||||||||
|
|
||||||||||||
Другий закон Ньютона: |
Основний закон динаміки оберталь- |
||||||||||||
Прискорення, з яким ру- |
ного руху: Кутове прискорення, з |
||||||||||||
хається тіло, пропорцій- |
яким обертається тіло, пропорційно |
||||||||||||
но до прикладеної сили і |
до моменту сили і обернено пропор- |
||||||||||||
обернено пропорційно |
ційно до його моменту інерції: |
||||||||||||
до його маси: |
|
|
|
M |
|||||||||
|
|
|
|
F |
|
|
|
|
I |
||||
|
|
a |
|
|
|
|
Якщо врахувати, що d /dt , то осно- |
||||||
|
|
m |
|
||||||||||
Якщо |
|
врахувати, |
що |
вному закону обертального руху можна |
|||||||||
a dv/dt , то другому зако- |
надати такого вигляду: |
||||||||||||
ну Ньютона можна надати |
|
|
|
|
|||||||||
M dt I d або |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
такого вигляду: F dt |
m dv |
M dt d I |
|||||||||||
або |
|
|
d mv |
|
Імпульс моменту сили дорівнює змі- |
||||||||
|
F |
dt |
|
ні моменту імпульсу тіла. |
|||||||||
Імпульс сили дорівнює зміні імпульсу тіла.
Кінетична енергія поступаКінетична енергія обертального руху льного руху визначається визначається формулою формулою

6
пост |
|
mv2 |
оберт |
|
I 2 |
|
Wк |
|
|
Wк |
|
|
|
2 |
2 |
|
||||
|
|
|
|
|
||
|
|
|
|
|
|
|
2.1 ПРИЛАДИ І ПРИЛАДДЯ
Установка для визначення моменту інерції, лінійка, електричний секундомір, штангенциркуль, ваги.
2.2 ЕКСПЕРИМЕНТАЛЬНА УСТАНОВКА
Виміри проводяться на установці, показаній на рис.2.1. Основний вал установки ОО, на якому закріплено на різьбленні досліджуване тіло Т, лежить на шарикопідшипниковій опорі 1. На валу закріплений маховик 2 і барабан 3, на який намотана нитка. Один кінець нитки закріплений на барабані, а другий перекинений через блок 5 і закінчується гачком, на який підвішується гирка 6 масою m. Якщо відпустити гальмо 4, то гирка буде опускатися уздовж вертикальної лінійки 7, приводячи вал в обертальний рух. Для зупинки обертання служить електромагнітне гальмо 4
Рис.2.1
2.3 ТЕОРЕТИЧНА ЧАСТИНА: ВИВЧІТЬ РОЗДІЛ 1.1.
2.4. ВИВЕДЕННЯ РОЗРАХУНКОВОЇ ФОРМУЛИ
Установимо гирку на висоті Н. Якщо її відпустити, то поряд з поступальним рухом гирки виникне обертальний рух установки. Відповідно до закону збереження енергії потенціальна енергія гирки mgН буде переходити в кінетичну енергію поступального руху гирки
7
mv2 /2 , кінетичну енергію обертального руху приладу I 2 2 і затрачатися на виконання роботи проти сил тертя Fтр Н:
2 і затрачатися на виконання роботи проти сил тертя Fтр Н:
mgH mv2 |
|
I 2 |
Fтр H . |
(2.1) |
|
2 |
|||||
2 |
|
|
|
При досягненні щонайнижчої точки гирка непружно співударяється з поверхнею підлоги і її кінетична енергія перетворюється в теплову. Прилад же продовжує обертатися і його кінетична енергія
I 2 2 перетворюється в потенціальну енергію гирки mgH1 і частково витрачається на виконання роботи проти сил тертя Fтp H1:
2 перетворюється в потенціальну енергію гирки mgH1 і частково витрачається на виконання роботи проти сил тертя Fтp H1:
I 2 |
mgH1 Fтр H1. |
(2.2) |
|
2 |
|||
|
|
де H1 - висота, на яку піднімається гирка після удару об підлогу, причому H1<H (поясніть чому?).
Знайдемо з (2.2) силу тертя і підставимо у вираз (2.1):
mgH mv |
2 |
|
I |
2 |
|
|
|
H |
|
|
|
|
|
|
|
1 |
|
mgH |
|
||||||
|
2 |
|
H1 |
|
||||||||
2 |
|
|
|
|
|
|
|
|
|
|||
Звідси |
|
|
|
|
|
|
|
|
|
|
|
|
4mgH mv2 I 2 |
|
|
|
H |
|
|
||||||
1 |
|
. |
(2.3) |
|||||||||
|
H1 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Виразимо тепер лінійну і кутову швидкості через величини, які можна виміряти в даному досліді. Оскільки рух гирки є рівноприскореним, то
v at, H at2 .
2
Виключивши з цих виражень прискорення a , одержимо:
v |
2H |
. |
(2.4) |
|
|||
|
t |
|
|
Нехай r – радіус шківа, на який намотана нитка. З врахуванням зв'я- зку між лінійною і кутовою швидкістю, одержимо:
|
v |
; |
|
2H . |
(2.5) |
|
r |
||||||
|
|
|
rt |
|
8
Підставимо тепер (2.4) і (2.5) у (2.3):
|
2 |
|
I 4H |
2 |
|
H |
|
|
4mgH m |
4H2 |
|
|
1 |
|
. |
||
2 2 |
|
H1 |
||||||
|
t |
|
r t |
|
|
|
|
|
Скоротимо на 4Н і помножимо обидві частини рівності на r2t2. В результаті дістанемо:
|
|
|
|
|
|
|
|
|
H |
|
|
mgr2t2 mr2H IH 1 |
|
. |
|||||||||
|
|||||||||||
|
|
|
|
|
|
|
|
|
H1 |
||
Звідси |
|
|
|
|
|
|
|
|
|
|
|
IH |
|
|
H |
|
mr2 gt |
2 H |
|||||
1 |
|
|
|||||||||
|
|
||||||||||
|
|
|
H1 |
H |
|
|
|
||||
I |
|
mr2 gt2 |
|
|
|
||||||
|
H 1 H /H1 |
|
|
|
|
||||||
або |
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
mr2 gt2 /H 1 |
. |
(2.6) |
||||||
|
|
|
1 H /H1 |
|
|
||||||
У цьому виразі gt2 — подвоєний шлях, який пройшла б гирька при вільному падінні за час t, Н — шлях, що проходить гирька в умовах досліду, рухаючись з прискоренням а. У нашому випадку gt2>>H, то-
му gt2/H>>1.
З урахуванням цієї нерівності вираз (2.6) спрощується
I |
md2 gt2H |
1 |
|
, |
(2.7) |
|
4H H H1 |
|
|||||
|
|
|
||||
де d=2r – діаметр шківа, на який намотана нитка.
Для того, щоб обчислити момент інерції тіла, необхідно з виразу (2.7) відняти момент інерції приладу. Для цього згвинчують досліджуване тіло з осі 00 (рис. 2.1) і вимірюють час падіння t0 з тієї ж висоти Н і відповідно висоту Н0 наступного підйому гирки. Тоді згідно
(2.7)
|
|
|
md2gt2H |
0 |
|
|
|
|
I |
прил |
|
0 |
|
. |
(2.8) |
||
4H H H0 |
|
|||||||
|
|
|
|
|||||
9
Віднявши (2.8) з (2.7), одержимо розрахункову формулу для обчислення моменту інерції тіла:
|
|
|
|
md2g |
t |
2H |
|
|
|
t2H |
0 |
|
|
|
||||
Iексп I I |
прил |
|
4H |
|
|
|
1 |
|
|
0 |
|
|
(2.9) |
|||||
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
H |
H1 |
H H0 |
|
||||||||||
або |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Iексп , |
|
|
|
|
|
|
|
(2.10) |
|||||||
де |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
md2g |
|
|
|
t2H |
1 |
|
|
|
|
|
|
t2H |
0 |
|
|
|
|
|
|
; |
|
|
|
|
; |
|
|
|
0 |
|
, |
(2.11) |
||||
4H |
H H1 |
|
H H0 |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Експериментальне значення моменту інерції, знайдене за формулою (2.10), слід зіставити з його теоретичним значенням
Iтеор 12 mr2 ,
де m — маса диска, a r — його радіус. Маса диска визначається очевидним виразом m= V, де — густина матеріалу диска, а V=1/4 D2h — його об’єм. Остаточно формула для теоретичного розрахунку моменту інерції має вид:
I |
теор |
|
|
D4h. |
(2.12) |
|
32 |
||||||
|
|
|
|
2.5 ПОРЯДОК ПРОВЕДЕННЯ ВИМІРІВ
1.Зважують гирку на вагах. Точність зважування визначається масою найменшої гирки (звичайно m = 50 мг).
2.За допомогою штангенциркуля вимірюють діаметр барабана d, на який намотується нитка.
3.Нагвинчують на вісь приладу досліджуване тіло, намотують нитку на барабан і підвішують до неї гирку.
4.Піднімають гирку на висоту Н, яку відраховують по лінійці по нижній частині гирки.
5.Запускають установку, одночасно відпускаючи гальмо і запускаючи секундомір. При досягненні гиркою нижньої точки зупиняємо секундомір і далі по його циферблату відраховуємо час падіння t з точністю до 0,01 с.
6.Гирка далі піднімається нагору й у найвищій точці підйому зупиняють установку гальмом. По лінійці визначають висоту підйому H1.

10
7.Виміри по пунктах 4, 5, 6 проводять 5 разів, зберігаючи незмінною висоту падіння гирки Н. Результати вимірів заносять у таблицю 1.
8.Для визначення моменту інерції приладу згвинчують досліджуване тіло і повторюють виміру згідно п.п. 4-7. Результати вносять у таблицю 1.
9.Штангенциркулем вимірюють розміри досліджуваного тіла (діаметр D і висоту h) для наступного теоретичного обчислення моменту інерції. Результати вимірів вносять у таблицю 2.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблиця 1 |
|
G=9,81 м/с; Н=... м; m = ... кг; d = ... мм |
|
|
|
|
|
|
|||||||||
¹ t, t, c t2 10-4H1, |
H1, H12 |
T0, c t0, c t02 H0, м Ho, м H02 |
|||||||||||||
c |
|
|
|
|
м |
м 10-4 |
|
|
10-4 |
|
|
|
10-4 |
||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
tср t2= |
|
|
H1ср H12= |
|
t0ср= t02= |
|
H0ср= H02= |
||||||||
= |
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
St |
t2 |
...; |
SH1 |
|
H12 |
...; St0 |
t02 |
...; |
SH0 |
|
H02 |
||||
5 |
4 |
|
5 4 |
5 |
4 |
5 4 |
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблиця 2 |
|
№D, мм |
D, мм D12 10-4 H, мм |
h, мм |
|
|
|
|
h2 10-4 |
||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
D2= |
|
|
hср= |
|
h2= |
|
|
|
|
|
|
|
Dср= |
|
|
|
|
|
|
|
|
|
|
|||||
SD |
D2 |
|
|
h2 |
... |
|
|
|
|
|
|
||||
|
2 |
3 |
...; Sh |
2 3 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
2.6. ОБРОБКА РЕЗУЛЬТАТІВ ВИМІРІВ |
|
|
|
|
|
|
|||||||||
1. По експериментальним даним таблиць 1 і 2 обчислюємо середні
значення величин tcp, t0cp, Н1cp, Н0ср, Dcp, hcp і відповідні середні квадратичні похибки вимірів St, St0, SH1, SH0, SD і Sh,. Результати
обчислень заносимо в таблиці 1 і 2.