

Muratov_V_G_Metrologia_tekhnol_izmer_i_pribor
.pdfМодуль 1. Метрологія, стандартизація, сертифікація |
61 |
|
|
Величину класу точності вказують на шкалі або лицевій панелі ЗВТ. При цьому технічним ЗВТ присвоюють класи точності від 0,25 (точніші) до 6,0 (найменш точні). ЗВТ, у яких клас точності гірший
6.0, називають індикаторами.
Для можливості відмінності того, яка з похибок зазначена як клас точності, застосовують наступні умовні позначки:
1. Якщо клас точності встановлений за величиною похибки чутливості γS, тобто, форма смуги похибок умовно береться чисто мультиплікативною, то позначене на шкалі ЗВТ число класу точності обводиться колом.
Наприклад, позначення 1,0 означає, що γS = 1,0 %.
2. Для ЗВТ з різко нерівномірною шкалою клас точності вказують у частках довжини шкали і позначають так: 1,5 .
3. Якщо смуга похибок узята адитивною і прилад нормується приведеною похибкою γ за виразом (2.8), то клас точності вказують просто: 1,5.
4. У деяких випадках, коли основна похибка ЗВТ нормується за величиною абсолютної погрішності , класи позначають порядковими цифрами або буквами, які не пов’язані з величиною похибки. Наприклад, класи точності термометрів опору до 1985 р. маркували римськими цифрами (Ι, ΙΙ, ΙΙΙ), а тепер — буквами (А, В, С). При цьому кожному класу відповідають свої значення коефіцієнтів а, b у рівнянні (2.7).
5.Позначення класу точності, наприклад, 0,02 / 0,01 указує, що
похибка ЗВТ на початку шкали рівна: γH = 0,01 %, а наприкінці шкали γK = 0,02 %.
6.Для ЗВТ в акустиці, світлотехніці, електроніці та ін. відліковий пристрій яких проградуйований в дицибелах, неперах і таке інше, клас точності позначають у цих одиницях, наприклад: Кл. 0,5 дб.
7.Для широкодіапазонних ЗВТ замість формул розрахунку похибок у НТД часто приводять просто діапазони, у яких похибка результату вимірювання не перевищує зазначеної величини. Наприклад, указують, що відносна похибка вимірювання опору не перевищує 0,5 % — у діапазоні від 102 до 104 Ом; 1,0 % — у діапазоні від 104 до 108 Ом і т. д.

62 В. Г. Муратов. Метрологія, технологічні вимірювання та прилади
2.2. Ймовірнісна оцінка похибок вимірювань
У теорії ймовірностей оперують наступними основними поняттями. Будь-який отриманий результат вимірювань, спостережень і т.д. називають подією. Якщо при відтворенні того самого досліду (комплексу умов) подія може настати, а може не настати, то її нази-
вають випадковою подією. Випадковою величиною (ВВ) називають змінну величину, що супроводжує випадкову подію й відбиває різноманіття неврахованих коливань умов, при яких проводиться цей дослід. Ймовірністю події Р(х) називають кількісну міру ступеня об’єктивної можливості появи даної події х при одному досліді. Усяке співвідношення, за допомогою якого встановлюється зв’язок між значеннями ВВ і відповідними ймовірностями називають законом розподілу ВВ. Закон розподілу може бути заданий аналітично: Р(х) = ϕ(х), у вигляді таблиці або графіка. Найповніше ВВ характе-
ризуються функцією розподілу F(x) ймовірностей і її похідної — густиною розподілу ймовірностей ƒ(х), за допомогою яких можна знайти ймовірність знаходження випадкової величини х у заданому
інтервалі [a1, a2]: |
a2 |
|
|
F(x) = Р[a1 < x < a2] = ∫f (x)dx |
(2.9) |
a1
При рішенні практичних завдань мають справи з різними закона-
ми розподілу: Пуассона, Стьюдента, рівномірним, експонентним, трикутним, трапецієподібним і т.д.
Найбільше поширення в практиці вимірювань одержав нормальний закон розподілу (Гауса), який базується на двох аксіомах:
1)придужевеликійкількостівимірюваньвипадковіпохибки, рівні по величині, але різні за знаком, зустрічаються однаково часто;
2)найчастіше зустрічаються менші похибки, а більші похибки зустрічаються тим рідше, чим вони більші.
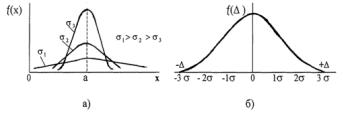
Криві нормального розподілу густини ймовірності ВВ будують
(рис. 2.2а) за формулою:
f (x) = |
1 |
exp |
−(x −a)2 |
(2.10) |
σ 2π |
2σ2 |
Тут а — значення координати центру групування результату,
названого центром розподілу; σ — середнє квадратичне відхилення, обумовлене виразом (2.13).
Модуль 1. Метрологія, стандартизація, сертифікація |
63 |
|
|
Виражаючи величину випадкової похибки |
через результат |
шуканого вимірювання хi у вигляді (2.1): |
|
= хi – а |
(2.11) |
отримують криву нормального розподілу (рис. 2.2 б), симетричну щодо центру розподілу 0.
Рис. 2.2. Закон нормального розподілу: а) — випадкової похибки х;
б) — випадкової похибки ∆
Аналіз рівняння (2.10) показує, що ƒ(х) і ƒ( ) швидко зменшуються зі зростанням σ. При = 5σ значення ƒ( ) в 3,7 106 раз менше, ніж при = 0.
Якщо обчислити кількість похибок N, з яких тільки одна може перевищувати значення , то одержимо: тільки одна випадкова похибка із 22 буде перевищувати по абсолютній величині 2 ; з 370 одна більше 3 і тільки одна похибка із 15625 буде більше 4 .
На практиці число вимірювань, як правило, не перевищує кількох десятків, і поява похибки більше 3σ — малоймовірна. Тому похибку = 3σ називають граничною погрішністю ряду вимі-
рювань.
Обсяг вимірювань, необхідний для достатнього встановлення закону розподілу, надзвичайно великий. Тому в більшості випадків обмежуються наближеним визначенням основних характеристик
ВВ: математичного очікування М( ) і дисперсії D( |
). |
|
Математичне очікування |
|
|
m |
|
|
М( ) =limn→∞ 1 ∑ i , |
(2.12) |
|
n i=1 |
|
|
де n — число вимірювань, характеризує систематичну складову |
S |
|
похибки вимірювань і визначає її центр розподілу. У свою чергу, |
||
дисперсія D( ) характеризує міру розкиду випадкової складової |
о |
|
64 В. Г. Муратов. Метрологія, технологічні вимірювання та прилади
навколо центру розподілу. Тобто, похибка вимірювання |
— це сума |
|||||||
систематичної й випадкової похибок: |
|
|
|
|
|
|||
|
= |
S + |
0 |
|
|
|
(2.13) |
|
Дисперсія похибки: |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
1 |
|
n |
|
−M( |
)]2 |
|
|
D( ) =lim |
|
[ |
|
, |
(2.14) |
|||
|
|
|
||||||
n→∞ |
|
|
∑ |
i |
|
|
||
|
n −1 i=1 |
|
|
|
|
|
||
де i — результат шуканого вимірювання, n — число вимірювань. Чим більша дисперсія, тим менша точність. Розмірність дисперсії відмінна від розмірності вимірюваної величини. Тому в практиці
застосовують середньоквадратичне відхилення σ( |
) — позитивну |
величину, що має розмірність вимірюваної ФВ. |
|
Середньоквадратична похибка (відхилення): |
|
σ( ) = D( ) |
(2.15) |
У практиці вимірювань часто застосовують також серединну й середньоарифметичну похибки.
Ймовірна (серединна) похибка δСР — щодо якої при повторних вимірюваннях ФВ є випадкові похибки, одна половина яких за модулем менша δСР, а інша — більша:
δСР ≈ 2σ / 3 |
(2.16) |
Середня арифметична δА похибка ряду вимірювань: |
|
δА ≈ 4σ / 5 |
(2.17) |
Варіацію показань ЗВТ при багаторазових вимірюваннях виражають модулем різниці математичних очікувань ХМ— меншого й ХБ — більшого показань щодо дійсного значення Х:
Н = М(М) – М(ХБ) |
(2.18) |
Якщо відомий закон розподілу випадкових похибок, можна
визначити ймовірність появи похибки , |
що не виходить за деякі |
|||
прийняті межі [ 1; |
2]. |
|
|
|
Цейінтервалназиваютьдовірчимінтервалом, аймовірністьРД, що |
||||
його характеризує — довірчою ймовірністю: РД = Р[ 1 ≤ |
≤ |
2]. |
||
При побудові |
довірчого інтервалу |
задаються |
значеннями |
|
РД = 0,9; 0,95; 0,96; 0,98; 0,99; 0,997; 0,999. Чим більше РД, тим

Модуль 1. Метрологія, стандартизація, сертифікація |
65 |
|
|
надійніша оцінка інтервалу. І навпаки, за заданим довірчим інтервалом можна знайти РД межі інтервалу, за які із заданою довірчою ймовірністю не виходять випадкові похибки, звичайно виражають у вигляді кратного σ значення: 1,2 = ± tσ, де t — безрозмірний коефіцієнт, обумовлений заданою ймовірністю й видом закону розподілу. Для нормального закону розподілу значення РД можна визначити за таблицею значень інтеграла ймовірностей (функції Лапласа).
Інтеграл ймовірностей Ф(t) представляє площу між кривою нормального розподілу і віссю абсцис, у межах від -t до +t і дорівнює:
|
2 |
t |
y2 |
|
||
Ф(t) = |
∫e− |
|
dy |
(2.19) |
||
2 |
||||||
|
||||||
|
2π −t |
|
|
|
||
Оскільки Ф(t) симетричний, часто приводять табличні значення [12] інтеграла ймовірностей Ф0(t) = 0,5 Ф(t). Для характеристики закону розподілу, крім того, застосовують інтегральну функцію нормального розподілу F(t), одержувану підстановкою t в (2.10), а потім в (2.9). Перехід значень функції F(t) до інтеграла ймовірностей і навпаки здійснюють за формулою:
Ф(t) = 2F(t) – 1 |
(2.20) |
На результат вимірювання в явному й неявному виді може впливати ФВ, не вимірювана даним ЗВТ (напруга живлення, зовнішнє магнітне поле, температура, вологість і т. д.) і названа впливовою величиною ξ. При цьому будь-яку метрологічну характеристику ЗВТ можна представити у вигляді суми її частини, що не залежить від зовнішніх впливових ФВ, і частини, що виражається випадковою від них функцією. Цю функцію називають функцією впливу ψ(ξ), а ступінь її зв’язку з похибкою вимірювання визначають за допомогою кореляційного моменту і коефіцієнта кореляції.
Кореляційним моментом μXY випадкових величин Х и В називають математичне очікування добутку відхилень цих величин:
μXY = М{[Х – М(Х)][Y – М(Y)]}. |
(2.21) |
Для обчислення кореляційного моменту дискретних величин (наприклад, результатів багаторазових вимірювань) користуються фор-
мулою: |
n |
m |
|
|
μXY |
=∑∑[xi |
−M(X)][yj |
−M(Y )]p(xi ;yj ). (2.22) |
|
|
i=1 |
j=1 |
|
|

66 В. Г. Муратов. Метрологія, технологічні вимірювання та прилади
Коефіцієнт кореляції — відношення кореляційного моменту до добутку середнє квадратичних відхилень цих величин:
rXY = |
μХY |
(2.23) |
σX σY |
Якщо ВВ Х і В некорельовані (незалежні один від одного), то μXY = 0, звідки rXY = 0. У випадку, коли rXY = 1, між ними існує тверда пропорційна залежність:
xi =∑Cij yj . j
Для оцінки похибок ЗВТ застосовують також автокореляційну функцію K(t, t´) і спектральну густину дисперсії S(ω).
Автокореляційна функція випадкової функції, наприклад, похибки Х(t) –це невипадкова функція K(t, t´), яка при кожній парі значень t і t´ дорівнює кореляційному моменту відповідних перетинів випадкової функції (перетином називають значення ВВ при фіксованому t):
o o |
(2.24) |
K(t, t′) = M [X(t),X(t′)] |
Нормованою автокореляційною функцією називають коефіці-
єнт кореляції перетинів X(t) і X(t´):
r(t, t´) = K(t, t´) / σ(t) σ( t´) |
(2.25) |
Значення автокореляційної функції залежить тільки від різ-
ниці τ = t – t´ значень своїх аргументів: K(τ, t) = К(τ). З теорії ймовірностей [10] відомо, що спектральне розкладання функції Х(t) у
ряд Фур’є дозволяє визначити: |
|
|
∞ |
|
|
— автокореляційну функцію: K(τ) = ∫S(ω)cosωτdω, |
(2.26) |
|
0 |
∞ |
|
— спектральну густину дисперсії S(ω) = π2 |
|
|
∫K(τ)cosωτdτ, |
(2.27) |
|
|
0 |
|
∞ |
|
|
— і дисперсію D[X(t)] =σ2 = ∫S(ω)dω |
|
(2.28) |
0 |
|
|
Нормована спектральна густина дисперсії при цьому дорівнює:
s(ω) = S(ω) / σ2 |
(2.29) |

Модуль 1. Метрологія, стандартизація, сертифікація |
67 |
|
|
2.3. Похибки непрямих вимірювань
При непрямому вимірюванні значення вимірюваної величини Y знаходять за результатами прямих вимірювань величин: Х1, Х2, Х3, … ХN, з якими Y зв’язана явною функціональною залежністю:
Y = F(Х1, …, ХN; a1, …, aM), |
(2.30) |
де a1, … aM — коефіцієнти, значення яких відомі точно або тільки |
||
приблизно. |
|
|
Якщо прямі вимірювання Хi |
виконані з абсолютними похибками |
|
Хi і коефіцієнти aj |
відомі з похибками aj, то |
|
Y + Y = F( Х1 + |
Х1, …, ХN + |
ХN; a1 + a1, …, aM + aM) (2.31) |
Оскільки в порівнянні зі значеннями коефіцієнтів і вимірюваних величин їх похибки малі, функцію (2.30) можна розкласти в ряд
Тейлора, обмежившись залишенням тільки лінійних членів: |
|
||||||||||||||||||||||
|
|
|
|
Y + Y = F( Х1, …, ХN; a1, …, aM) + |
|
|
|
|
|
|
|||||||||||||
+ |
∂F |
|
Х |
|
+ … + |
|
∂F |
|
Х |
+ |
∂F |
|
a |
|
+ … + |
∂F |
|
a |
|
(2.32) |
|||
∂X1 |
|
∂XN |
|
|
|||||||||||||||||||
|
|
1 |
|
N |
|
∂a |
|
1 |
|
∂a |
|
M |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
M |
|
|
|
|||
Тоді вирахування ( 2.30 ) з ( 2.32 ) дає: |
|
|
|
|
|
|
|
|
|
||||||||||||||
Y = |
∂F |
X1 + … + |
|
∂F |
XN + |
∂F |
a |
+ … + |
|
∂F |
|
aM (2.33) |
|||||||||||
|
|
∂aM |
|
||||||||||||||||||||
|
∂XN |
|
|
||||||||||||||||||||
∂X1 |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
∂a |
|
1 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|||
Тут (∂F/∂Хi) Хi і (∂F/∂aj) aj називаються частковими похибка-
ми непрямого вимірювання, а часткові похідні ∂F/∂Хi й ∂F/∂aj — коефіцієнтами впливу похибок прямих вимірювань Хi і похибок aj на його результат.
Якщо похибки корельовані, то середньоквадратичне відхилення результату дорівнює:
|
N |
∂F |
|
|
2 |
|
∂F |
|
∂F |
|
M |
|
∂F |
2 |
|||||
σ= |
∑( |
|
|
σXi ) +2∑( |
|
|
)( |
|
|
)riS σXiσXS + |
∑( |
|
|
σAj ) |
(2.34) |
||||
∂X |
|
∂X |
i |
∂X |
S |
∂a |
|
||||||||||||
|
i=1 |
|
i |
|
i<S |
|
|
|
|
j=1 |
|
|
j |
|
|
||||
де riS |
— коефіцієнти кореляції між окремими похибками |
|
Хi, серед- |
||||||||||||||||
ньоквадратичне відхилення яких відповідно σXi |
й σXS. При цьому |
||||||||||||||||||
величини |
Хi й |
aj |
некорельовані. У випадку, |
коли немає кореляції |
|||||||||||||||
між похибками |
Хi |
й усі |
aj = 0, то вираз (2.33) спрощується: |
||||||||||||||||

68 |
В. Г. Муратов. Метрологія, технологічні вимірювання та прилади |
|||
|
|
|
|
|
|
N |
∂F |
|
|
|
σ= ∑( |
σXi )2 |
(2.35) |
|
|
∂X |
|||
|
i=1 |
i |
|
|
З формули (2.35) випливає, що якщо залежність Y = F(X) виражається лінійним багаточленом першого ступеня з одиничними коефіцієнтами, то справедливий наступний вираз для визначення суми складових σi сумарної похибки σΣ:
N |
|
σΣ = ∑σ2i |
(2.36) |
i=1
Якщо закони розподілу випадкової величини однакові, то (2.35) справедливо й для граничних похибок:
N |
|
2 |
(2.37) |
Σ = ∑ i |
|
i=1 |
|
Результат непрямого вимірювання знаходять як функцію оцінок математичних очікувань номінальних значень, отриманих багаторазовими прямими вимірюваннями:
Y = ϕ (М[X1], …, M[XN]) |
(2.38) |
Користуватися оцінкою математичного очікування функції номінальних значень У = М[ϕ (X1, …, XN)], отриманих прямими вимі-
рюваннями замість виразу (2.38) не можна, тому що це спричиняє постійну систематичну похибку вимірювання, незважаючи на те, що систематичні похибки прямих вимірювань відсутні.
2.4. Методи зниження похибок
2.4.1. Класифікація
Причини появи похибок ЗВТ можуть бути зведені до наступних трьох груп:
—вплив зовнішніх факторів (температура і вологість навколишнього середовища, напруга зовнішнього магнітного й електричного полів, прискорення, вібрація, напруга мережі живлення та інше);
—вплив внутрішніх факторів (зміна опорів, ємностей, індуктивностей елементів ЗВТ, власні шуми, тощо);
Модуль 1. Метрологія, стандартизація, сертифікація |
69 |
|
|
— вплив неінформативних параметрів вхідного сигналу (час-
тоти під час вимірювання сигналів змінного струму, рівня сигналу під час вимірювання фази або періоду, та інше).
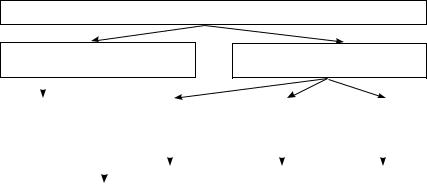
Методи (рис. 2.3), які використовують для підвищення точності вимірювань і ЗВТ можна розділити на дві групи: методи запобігання появі даної похибки й методи зниження рівня вже існуючої похибки.
Методи підвищення точності вимірювань і ЗВТ
Запобігання появи даної похибки (параметричні методи)
Зниження рівня існуючої похибки (структурні, алгоритмічні методи)
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Конструкторсько- |
|
|
|
|
Виключення |
|
Корекція |
|
|
Зниження |
||||
технологічні: |
|
|
|
|
похибок |
|
похибок |
|
|
похибок |
||||
— стабілізація |
|
|
|
|
систематичних |
|
систематичних |
|
|
випадкових |
||||
параметрів |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
елементів ЗВТ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
Методи |
|
Методи |
|
|
Методи |
|||
|
|
|
|
|
|
|
|
|
||||||
Захисно- |
|
|
— зміни знака |
|
— калібрування |
|
|
— теорії |
||||||
попереджувальні: |
|
|
|
—мультипліка- |
|
|
||||||||
— термостатування |
|
|
похибки |
|
тивної й |
|
|
ймовірноcтей |
||||||
— екранування |
|
|
— заміщення |
|
— аддитивной |
|
|
— мат. |
||||||
— амортизація |
|
|
— диференціаль- |
|
корекції |
|
|
статистики |
||||||
|
|
|
|
|
|
ний |
|
— зразкових |
|
|
— теорії |
|||
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
— протиставлення |
|
сигналів |
|
|
оптимального |
|||
|
|
|
|
|
|
— компенсаційний |
|
адаптації |
|
|
керування |
|||
|
|
|
|
|
|
— інші |
|
— інші |
|
|
— інші |
|||
Рис. 2.3. Методи зниження похибок вимірювань і ЗВТ
До першої групи відносять конструкторсько-технологічні й захисно-попереджувальні методи, називані методами парамет-
ричної стабілізації. Вони вирізняються відсутністю структурної надмірності в складі ЗВТ, тобто, використанням тільки тих вимірювальних перетворювачів, без яких процес вимірювання взагалі неможливий. Це зручні й відносно прості заходи.
Конструкторсько-технологічні методи передбачають застосу-
вання елементів і вузлів найвищої якості зі стабільними параметрами. Наприклад, використання манганінових резисторів для зниження температурної похибки, застосування плівкових резисторів для зменшення частотної похибки і т. д.
70 |
В. Г. Муратов. Метрологія, технологічні вимірювання та прилади |
|
|
Захисно-попереджувальні методи призначені для зменшення впливу зовнішніх факторів шляхом їхнього зниження в локальному просторі. Це термоустатування (коли елементи ЗВТ поміщають у герметичну камеру з регульованою постійною температурою), магнітне або електростатичне екранування, амортизація для захисту від вібрації, стабілізація напруги живлення та ін.
До другої групи відносять структурні й алгоритмічні методи
зниженнясистематичнихпохибок. Структурнізаснованінавведенні в процес вимірювання тимчасової або структурної надмірності з метоювиключення(компенсації) похибки. Цеускладнюєконструкцію або знижує швидкість дії ЗВТ через проведення додаткових вимірювань, але забезпечує одержання високоточних результатів без підвищення якості застосовуваних вимірювальних перетворювачів. Тут часто використовують нестабільні, прості, але надійні елементи ЗВТ, а необхідну точність вимірювань досягають обробкою додатковоїінформації. Доалгоритмічнихвідносятьметодикорекції, засновані на визначенні вже існуючих похибок аналітичним або експериментальнимшляхомзподальшимїхнімзниженнямупроцесі вимірювання або обліком при розрахунку кінцевого результату. Сюди ж входять і методи математичного моделювання корекції похибок, що реалізовані програмно.
У випадку багаторазових вимірювань відносно просто можна виявити й оцінити випадкову складову похибки вимірювання. Значно складніше виявити систематичну складову. Особливо, якщо вона повільно змінюється в часі. Тому виявлення і зниження систематичних похибок ЗВТ є найголовнішим завданням метрології, для рішення якої розроблена велика кількість різних методів.
2.4.2. Структурні методи зниження систематичних похибок
Основними структурними методами, застосовуваними в сучасних ЗВТ, єметоди: компенсаціїпохибкизазнаком, протиставлення, «симетричних» спостережень, диференційний, компенсаційний та інші.
Методкомпенсаціїпохибкизазнакомзастосовуєтьсяувипадках,
коли знак помилки можна змінити так, щоб вона ввійшла в
результат вимірювання спочатку зі знаком плюс, а потім зі знаком мінус. Якщо вимірювальне перетворення лінійне (1.5) і результати