

10.2 Уравнивание сетей трилатерации коррелатным способом
В сети трилатерации измеренными величинами являются длины сторон. Поэтому при уравнивании должны вычисляться поправки к ним, а затем по уравненным длинам сторон – уравненные значения всех параметров сети.
Наиболее простым способом составления условных уравнений является способ сравнения сумм или разностей углов, вычисленных по измеренным длинам сторон с их значениями, полученными по исходным данным.
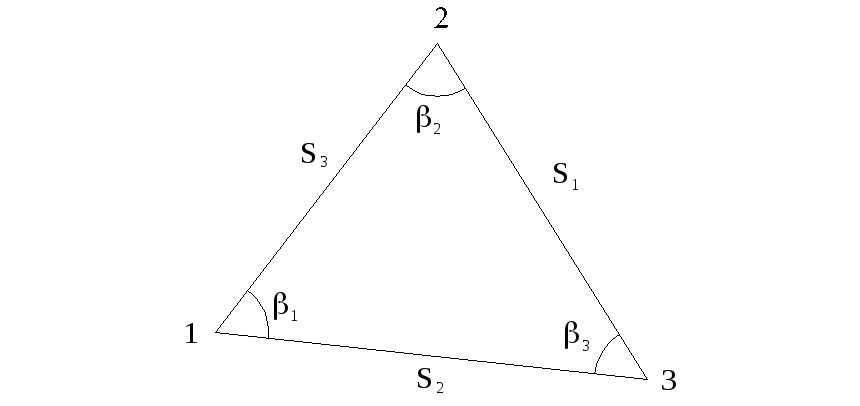
Рисунок 10.2 – Схема для определения углов
Углы удобно вычислять по формулам:
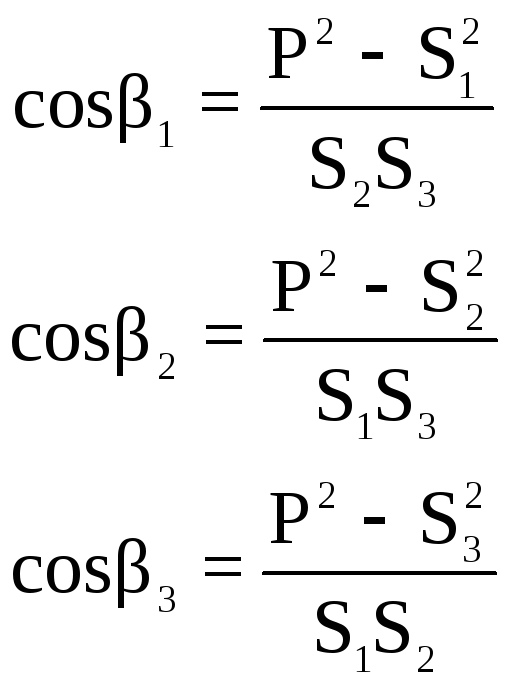 ,
,
где
![]() .
.
Подсчет числа условных уравнений выполняется графическим способом с построением схемы сети по длинам ее сторон. При этом каждой избыточной стороне соответствует одно условное уравнений. Для центральной системы трилатерации можно составить лишь одно условное уравнение:
1 + 2 + 3 + 4 + 5 – 3600 = 0.
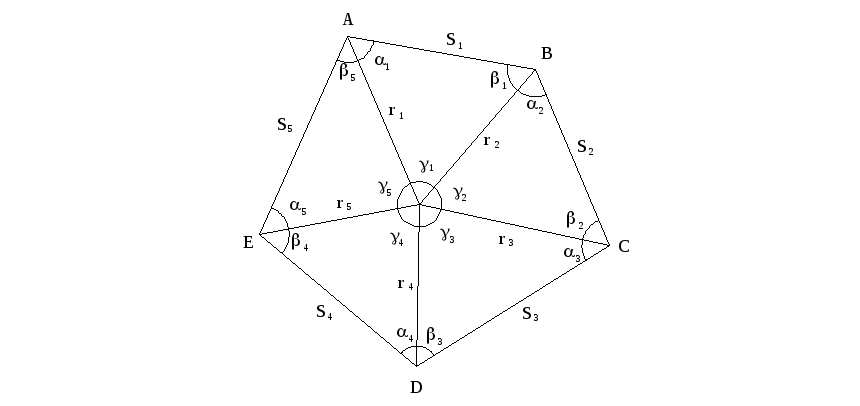
Рисунок 10.3 – Схема центральной системы трилатерации
Обозначим через ’i углы, вычисленные по измеренным длинам сторон, а поправки к ним – vi. Тогда:
v1 + v2 + v3 + v4 + v5 + w = 0.
где w = ’1 + ’2 + ’3 + ’4 + ’5 – 3600 – свободный член условного уравнения, выраженный в угловой мере.
Поправки в углы vi зависимы между собой, поэтому для решения условного уравнения необходимо поправки в углы vi выразить через поправки в измеренные длины сторон vSi и vri. По теореме косинусов запишем:
S12 = r12 + r22 – 2 r1 r2 cos 1.
Дифференцируя это выражение, получим:
2 S1 dS1 = 2 r1 dr1 + 2 r2 dr2 – 2 r2 cosγ1 dr1 – 2 r1 cos γ1 dr2 + 2 r1 r2 sin γ1 dγ1
или
S1 dS1 = (r1 – r2 cosγ1) dr1 + (r2 dr2– r1 cos γ1) dr2 + r1 r2 sin γ1 dγ1
Разделим обе части полученного выражения на S1:
![]()
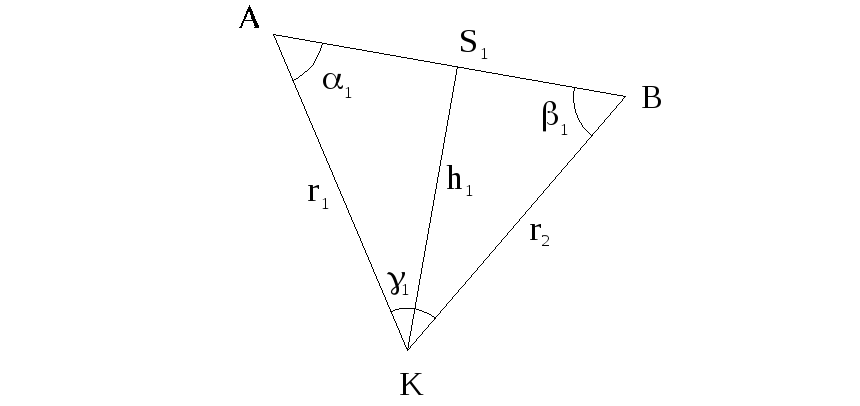
Рисунок 10.4 – Схема
Так
как
![]() получаем:
получаем:
![]()
Заменив дифференциалы на поправки, получим:

Отсюда:

Учитывая,
что ![]() получаем уравнение:
получаем уравнение:

Аналогично для Si получим:

Подставив эти выражения для поправок в углы γi в условное уравнение получим после преобразования:
![]()
где
Решение
системы условных уравнений выполняется
по методу наименьших квадратов, т.е.
при условии ![]()
где pS и pr – веса измеренных длин сторон S и r.
Остальные виды условных уравнений, возникающие в сетях трилатерации, получают аналогично:
- составляется условное уравнение, связывающее углы треугольников;
- решаются треугольники по измеренным длинам сторон;
- вычисляется невязка условного уравнения в угловой мере;
-
выражается при помощи формулы  поправки в углы
через поправки в длины сторон;
поправки в углы
через поправки в длины сторон;
- приводятся подобные члены полученных уравнений и окончательно составляются условные уравнения;
- методом наименьших квадратов решается система условных уравнений и вычисляются поправки в измеренные длины сторон.
10.3 Уравнивание сетей трилатерации параметрическим способом
Для составления параметрических уравнений поправок выразим длину линии между точками k и i через координаты начальной и конечной точек:
![]() .
.
Частные производные по x и y имеют вид:
![]()
Следовательно,
![]()
Для каждой измеренной стороны имеем:
![]()
где
![]() - уравненное
значение длины стороны между пунктами
k и i;
- уравненное
значение длины стороны между пунктами
k и i;
![]() -
предварительное значение длины этой
же стороны, вычисленное по предварительным
координатам точек;
-
предварительное значение длины этой
же стороны, вычисленное по предварительным
координатам точек;
![]() -
измеренное значение длины стороны
между точками k и i;
-
измеренное значение длины стороны
между точками k и i;
![]() -
поправка к предварительной длине
стороны;
-
поправка к предварительной длине
стороны;
![]() -
поправка в измеренную длину стороны.
-
поправка в измеренную длину стороны.
Следовательно,
![]() или
или ![]()
где
![]() - свободный член параметрического
уравнения.
- свободный член параметрического
уравнения.
Таким образом, параметрические уравнения поправок имеют вид:
![]()
Если
один из пунктов является исходным, то
для этого пункта ![]() равны 0. Система параметрических
уравнений поправок решается при условии
равны 0. Система параметрических
уравнений поправок решается при условии
![]() ,
при этом, вначале вычисляются поправки
в предварительные координаты
,
при этом, вначале вычисляются поправки
в предварительные координаты ![]() и их уравненные значения. Затем
вычисляются поправки в измеренные
длины сторон vS.
По уравненным длинам сторон осуществляется
контроль уравнительных вычислений.
и их уравненные значения. Затем
вычисляются поправки в измеренные
длины сторон vS.
По уравненным длинам сторон осуществляется
контроль уравнительных вычислений.
Предварительные координаты пунктов трилатерации могут быть найдены по формулам:
![]()
где
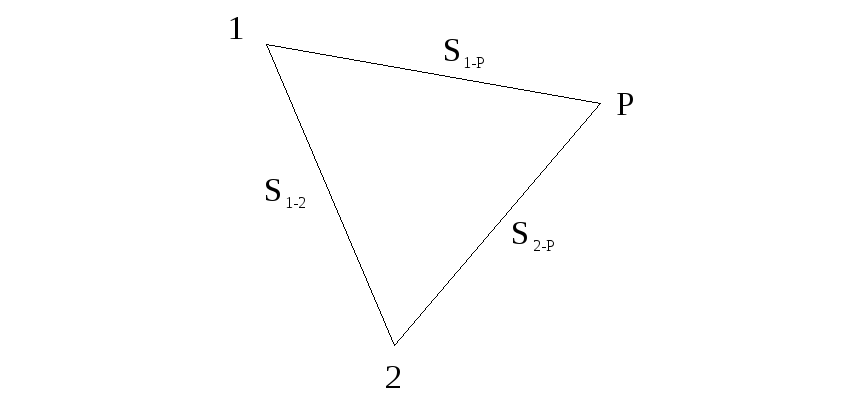
Рисунок 10.5 – Схема для определения предварительных координат пунктов трилатерации