

Опір матеріалів Частина 4
.pdf
|
|
|
|
|
|
|
|
|
|
l |
M |
M |
|
|
|
|
|
|
|
|
|
|||
|
в) переміщення від крутного моменту M k : 1F |
|
|
GkF J |
|
k1 dx |
|
, |
|
|
|
|
(9.3) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
де NF , M F , |
MkF - вирази для повздовжньої сили, |
згинального та крутильного моменту від |
||||||||||||||||||||||
заданого навантаження. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Для визначення переміщення довільної точки системи до неї в напрямку шуканого |
|||||||||||||||||||||||
переміщення прикладають одиничну силу (при визначенні лінійних переміщень), або одиничний |
||||||||||||||||||||||||
момент (при визначенні кутових переміщень). Тоді |
|
N1 , M1 , Mk1 - вирази для повздовжньої |
||||||||||||||||||||||
сили, згинального та крутильного моменту від вказаного одиничного навантаження. |
||||||||||||||||||||||||
|
При користуванні формулами інтегралу Мора (9.1) – (9.3) можна одержати переміщення |
|||||||||||||||||||||||
з різними знаками. Додатній знак переміщення вказує на те, що його напрямок збігається з |
||||||||||||||||||||||||
вибраним напрямком одиничного навантаження. Коли вирази для внутрішніх сил є різними для |
||||||||||||||||||||||||
різних стержнів системи (або на різних ділянках стержня), потрібно обчислювати інтеграли |
||||||||||||||||||||||||
Мора для окремих стержнів (ділянок) і результати підсумовувати. |
|
|
|
|
|
|
|
|||||||||||||||||
Приклад 9.1. |
Для балки, схема якої показана на рис. 9.1 а, визначити: |
|
|
|
|
|||||||||||||||||||
|
|
q 20kH м |
|
|
|
а) прогин в точці B ; |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
б) кут повороту в точці C . |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
A |
|
|
|
|
|
a) |
Матеріал балки – сталь ( E 2104 |
кН см2 ). Момент |
||||||||||||||||
2 м |
C |
|
|
B |
інерції перерізу J z 8000 см |
4 |
. |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||
|
3 м |
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
Вираз |
для |
згинального |
|
моменту |
M F |
від заданого |
|||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
1 |
|
навантаження: |
|
|
|
|
|
|
|
|
|
|
|
||||||
A |
|
|
x |
|
B |
б) |
|
|
BA 0 x 3 |
|
м |
M F x q x2 10 x2 . |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
1 |
|
|
|
|
а) Визначення прогину в точці В . |
|
|
|
||||||||||||||
|
|
|
|
|
|
До балки в |
точці B прикладають вертикальну (у |
|||||||||||||||||
A |
|
C |
|
|
B |
в) |
||||||||||||||||||
|
|
x |
|
напрямку прогину) одиничну силу (рис. 9.1б). Вираз |
||||||||||||||||||||
|
|
|
|
|
|
для моменту від цієї сили: |
|
|
|
|
|
|||||||||||||
|
|
x |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
BA 0 x 3 |
м M1 1 x x . |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
рис. 9.1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
За формулою (9.2) знаходять |
|
|
|
|
|
||||||||||||
|
|
l |
M F M1 |
|
3 м |
|
|
2 |
x |
|
|
|
|
1 |
10 |
4 3 м |
|
|
|
|||||
|
|
B |
E J |
z |
dx |
|
10 x |
|
dx |
E J |
|
|
4 x |
|
0 |
|
|
|
||||||
|
|
0 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
10 34 106 |
кН см3 |
|
12.6 см . |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
кН 8000 |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
2 104 |
см 4 4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
см 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Точка B переміститься вниз (у напрямку одиничної сили) на величину 12.6 см |
|||||||||||||||||||||||
б) Визначення кута повороту в точці C . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
До балки в точці C прикладають одиничний момент (рис. 9.1 в). Вирази для моменту M1 . |
||||||||||||||||||||||||
|
|
|
|
|
|
|
0 : BC 0 x 1 м |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
M1 |
|
1 : CA 1 x |
3 м |
|
. |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Оскільки вирази для M1 |
на ділянках BC і CA різні, то обчислюють інтеграл Мора (9.2) для |
|||||||||||||||||||||||
ділянок BC і CA та результати додають. Кут повороту в точці В : |
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
- 71 - |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
1 |
|
1 |
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
1 |
|
3 м |
10 x2 |
1dx |
10 |
|
3 м |
|
|||
|
|
|
|
|
|
M |
|
M |
|
|
dx |
|
|
M |
|
M |
|
|
dx |
|
|
|
x3 |
|
|||||||||||
B |
|
|
F |
1 |
F |
1 |
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
E J z |
|
|
|
|
|
|
|
|
|
|
|
E J z |
|
|
|
|
3 E J z |
|
1 |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
26 10 104 |
|
кН см 2 |
|
|
|
0.054 |
рад 0.054 |
180 |
3.1 . |
|
|
||||||||||||||||||
|
|
|
|
3 |
2 10 |
4 |
|
кН |
|
|
8000 см |
4 |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
см 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Поворот в точці В відбувається в напрямку, протилежному до напрямку одиничного моменту
M1 .
9.2. Способи обчислення інтегралів Мора.
Визначати переміщення систем (стержнів) можна як шляхом безпосереднього інтегрування інтегралів Мора (див. п. 9.1), так і без його інтегрування, використавши спосіб Верещагіна або
спосіб Сімпсона-Карнаухова.
Спосіб Верещагіна – це графоаналітичний спосіб, який ґрунтується на тому факті, що вирази для N1 , M1 , M k1 в інтегралах Мора (9.1) – (9.3) – це лінійні функції. Згідно з цим
способом переміщення від сил NF , M F |
, |
MkF визначаються за формулами: |
|
||||||||||
|
|
|
|
|
|
|
NF |
yN1 |
|
||||
а) переміщення від NF |
|
1N |
|
|
|
|
|
c |
|
(9.4) |
|||
F |
|
|
|
E |
A |
||||||||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
M F |
yM1 |
|
||||
б) переміщення від M F |
|
1M |
|
|
|
|
|
c |
|
(9.5) |
|||
F |
|
|
|
E |
Jz |
||||||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Mкр |
yMk 1 |
|
||||
г) переміщення від Mкр |
|
1M |
|
|
|
|
|
c |
|
(9.6) |
|||
кр |
|
|
|
G |
J |
||||||||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
де - площа епюри відповідної внутрішньої сили від заданого навантаження;
yc - ордината на епюрі від відповідного одиничного навантаження, що взята під центром епюри від заданого навантаження. Вибір виду одиничного навантаження такий самий, як і в
інтегралах Мора. |
|
|
|
|
|
|
|
|
|
В практичних розрахунках формулою Верещагіна найчастіше користуються при |
|||||||
визначенні переміщень в балках і рамах, викликаних згинальними моментами M F . |
Тоді у |
|||||||
формулі (9.5): |
|
|
|
|
|
|
|
|
M F |
- площа епюри згинального моменту M F |
від заданого навантаження; |
|
|
||||
y M1 |
- ордината на одиничній епюрі M |
1 |
, взята під центром епюри M |
F |
. |
|
|
|
c |
|
|
|
|
|
|
||
|
У випадку, коли обидві епюри |
|
M F і |
M1 - прямолінійні, то можна знаходити |
M |
і |
||
|
|
|
|
|
|
|
|
1 |
множити на ycM F . Якщо епюри мають
|
M F l |
M |
|
|
|
F |
|
|
|
|
|
MF 0 |
M F l 2 |
|
|
|
|
|
|
|
M1 l |
M1 |
|
|
|
|
|
M1 0 |
M1 l 2 |
|
|
|
рис.9.2 |
|
|
точки перелому, то формулу Верещагіна слід
використовувати для ділянок між точками перелому і результати підсумовувати. Епюри M F і M1 будують зі сторони розтягнутих
волокон. Тоді переміщення 1F буде додатнім
(тобто збігатиметься з прийнятим напрямком одиничного навантаження), якщо обидві епюри - M F і M1 - будуть розміщені по один бік від осі.
Спосіб Сімпсона-Карнаухова полягає у використанні методу Сімпсона при обчисленні визначених інтегралів для обчислення значень
- 72 -
інтегралів Мора (9.1) – (9.3). При згині ця формула має вигляд (рис. 9.2)
|
l |
|
|
|
l |
|
|
l |
|
|
|
|
1F |
|
|
M F 0 M1 0 |
4 M F |
|
M1 |
|
|
|
M F l M1 |
l . |
(9.7) |
|
|
|
||||||||||
|
6 E J z |
|
2 |
|
2 |
|
|
|
|
|||
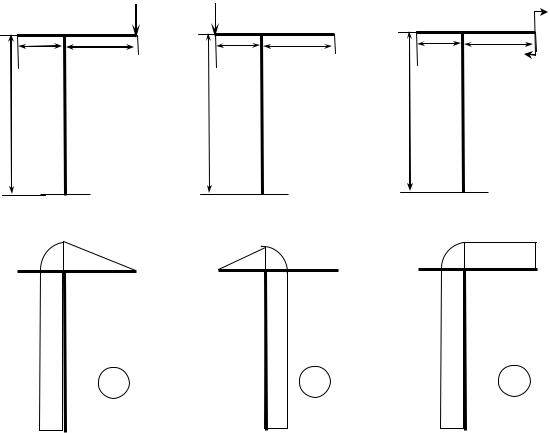
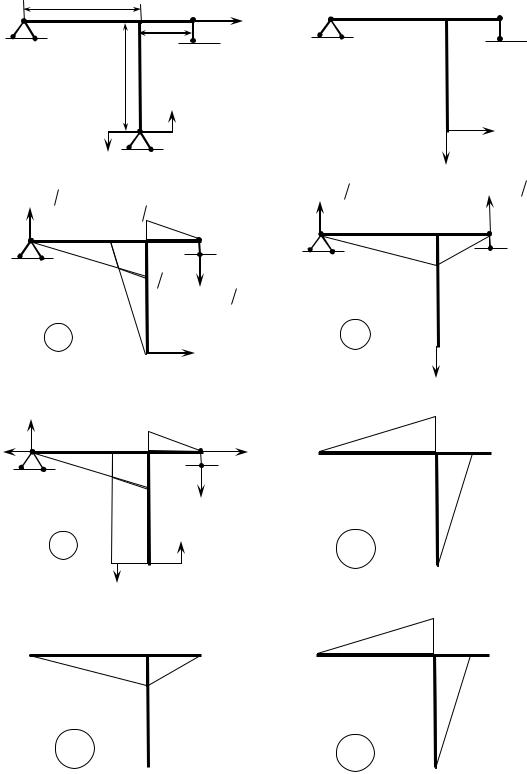
Приклад 9.2. Для показаної на рис. 9.3 а рами визначити: а) вертикальне переміщення точки A ; б) кут повороту в точці B , зумовлений згинальними моментами M F . Матеріал рами –
сталь ( E 2104 кН см2 ), поперечний переріз – квадрат зі стороною
см2 ), поперечний переріз – квадрат зі стороною
|
F 30kH |
|
1 |
|
|
|
A |
B |
A |
B |
A |
||
|
||||||
|
|
|
|
|||
1м |
2 м |
|
1м |
2 м |
|
|
3 м |
|
3 м |
|
|
3 м |
|
a) |
|
в) |
|
|
60 |
|
1 |
|
|
|
|
|
|
A |
B |
A |
B |
A |
M F |
M1 |
б) |
г) |
|
рис. 9.3 |
a 10 см .
1
B
1м |
2 м |
д)
1
B
M1
е)
а) Визначення вертикального переміщення в точці A .
1.Будуємо епюру згинальних моментів M F від заданого навантаження (рис. 9.3 б).
2.В точці A , в напрямку шуканого вертикального переміщення, прикладаємо одиничну силу (рис. 9.2 в).
3.Будуємо епюру M1 від одиничної сили (рис. 9.3 г).
4.За формулою (9.5) обчислюємо вертикальне переміщення
вер |
|
1 1 |
|
1 |
|
|
|
360 кН м3 |
|||
A |
|
|
|
|
260 0 |
|
1 1 0 60 3 2 |
|
|
|
, |
|
|
|
|
||||||||
|
|
E J z 2 |
|
2 |
|
|
|
E J z |
|||
де жорсткість E J |
|
2 104 |
кН |
|
204 |
см4 16.7 106 кН см2 . |
|||||
z |
см2 |
|
|||||||||
|
|
|
|
|
12 |
|
|||||
|
|
|
|
|
|
|
|||||
Тоді верA |
|
360106 |
кН см3 |
|
21.5 см . |
||||||
16.7 106 |
кН см2 |
||||||||||
|
|
|
|
|
|||||||
Точка A переміститься вверх (знак “ – “) на 21.5 см .
- 73 -
б) Визначення кута повороту в точці B .
В точці B прикладаємо одиничний момент (рис. 9.3 д) і будуємо епюру M1 від цього моменту (рис. 9.3 е). За формулою (9.5) отримуємо
|
1 |
1 |
|
|
|
240104 |
кН см2 |
|
|
|
||||
B |
|
|
|
2 60 60 3 1 |
|
|
|
|
|
|
0.144 |
рад 8.2 |
|
. |
|
|
16.7 10 |
6 |
кН см |
2 |
|
||||||||
|
E J z 2 |
|
|
|
|
|
|
|
|
|
||||
Поворот у точці B буде за ходом стрілки годинника (у напрямку моменту M1 ).
Приклад 9.3. Способом Сімпсона-Карнаухова визначити прогин вільного кінця консолі (рис.
M 30kH м
q 10kH м
м
A a)
2 м
x
1
A б)
x
рис. 9.4
9.4а), якщо E J z 20106 кН см2 .
Вираз для згинального моменту від заданого навантаження
M F x M |
q x2 |
|
30 10 x2 . |
||||
|
|||||||
|
2 |
|
|
|
|
||
Значення |
|
|
|
|
|
|
|
M F 0 |
|
l |
|
M F 1 20; |
|||
30; M F |
|
|
|||||
2 |
|||||||
|
|
|
|
|
|||
M F l M F 2 10.
Прикладаємо на вільному краю консолі (в точці A ) одиничну вертикальну силу (рис. 9.4 б).
Тоді:
M1 1 x x , M1 0 |
0 , M1 |
|
l |
|
1 , M1 |
l 2 . |
|
|
|
||||
|
||||||
|
|
2 |
|
|
|
|
Підставляємо знайдені значення у формулу (9.7):
верA |
|
l |
30 0 4 20 1 10 2 |
|
2 60106 кН см3 |
6 см . |
|
6 E J z |
20106 кН см2 |
||||||
|
|
|
|
|
Точка переміститься вверх (знак “ – “) на 6 см .
9.3 Розрахунок статично невизначних плоских рам методом сил.
Статично невизначною називається система, внутрішні сили в елементах якої неможливо визначити лише за допомогою рівнянь статики. В системі є ніби зайві зв’язки, в яких виникають зайві невідомі. Кількість цих невідомих рівна ступеню статичної невизначності системи і дорівнює різниці між кількістю невідомих і кількістю незалежних рівнянь статики. Для визначення зайвих невідомих потрібно скласти додаткові рівняння. Існує декілька методів складання цих рівнянь. Одним з них є метод сил, коли зайві невідомі визначаються з рівнянь переміщень.
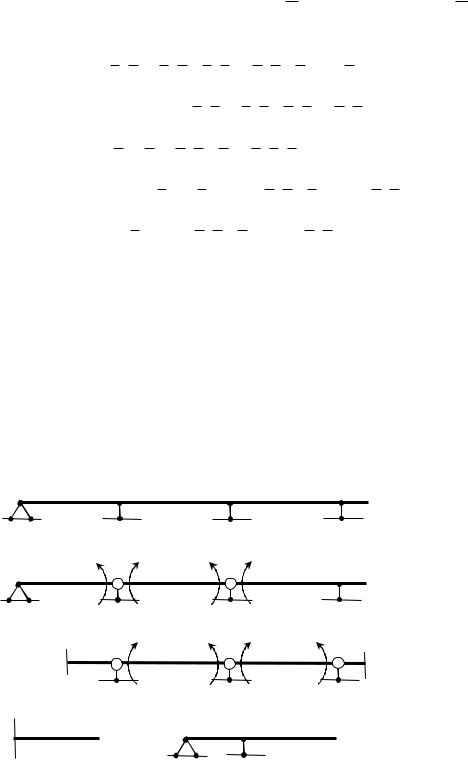
Послідовність розрахунку статично-невизначних систем.
1.Встановлюють ступінь статичної невизначності, тобто кількість зайвих зв’язків або зусиль.
2.Вибирають для заданої системи основну систему. Основна система – це та статично визначна, геометрично незмінна система, що одержується із заданої шляхом відкидання зайвих зв’язків. Для заданої системи можна вибрати декілька варіантів основних систем.
Основну систему завантажують заданим навантаженням і зайвими невідомими X1 , X 2 , ... , що замінюють дію відкинутих зайвих зв’язків.
3.Записують рівняння переміщень, прирівнявши до нуля переміщення точок основної
-74 -
|
системи в напрямках |
відкинутих зайвих |
зв’язків. |
|
Ці |
рівняння мають |
вигляд |
||||||||||||
|
i 0 i 1, 2... n , де |
i - сумарні переміщення у напрямках відкинутих зв’язків від |
|||||||||||||||||
|
заданого навантаження і зайвих невідомих. В розписаному вигляді ці рівняння |
||||||||||||||||||
|
називаються канонічними рівняннями методу сил. Вони мають вигляд: |
|
|||||||||||||||||
|
а) для I раз невизначної системи: 11 |
X1 1F 0 |
|
|
|
(9.8) |
|||||||||||||
|
|
|
|
|
11 X1 12 X 2 |
1F 0 |
(9.9) |
||||||||||||
|
б) для II раз невизначної системи: |
|
X |
|
|
|
|
X |
|
|
|
0 |
|||||||
|
|
|
|
|
|
|
21 |
1 |
22 |
2 |
2F |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
де i |
|
|
|
|
|
|
|
|
|
|
|
||||||||
j - переміщення в напрямку сили X i 1 від сили X j 1 ; |
|
|
|
|
|
|
|||||||||||||
iF |
|
|
|
|
|||||||||||||||
- переміщення в напрямку одиничної сили X i 1 від заданого навантаження. |
|
||||||||||||||||||
4. |
Користуючись інтегралами Мора (9.1) – (9.3) |
|
або способом Верещагіна (9.4) |
– (9.6), |
|||||||||||||||
визначають переміщення i j і iF . Коефіцієнти i j j i .
5.Підставляють коефіцієнти в рівняння переміщень (9.8), (9.9) і визначають зайві невідомі
X i .
6.Знаходять значення згинальних моментів в характерних точках рами, використавши формулу
x M1 X1 M2 X 2 ... M F . (9.10)
x для заданої рами.
7. Будують епюри поперечних Q x |
та повздовжніх N сил. |
|
||||
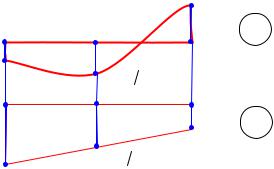
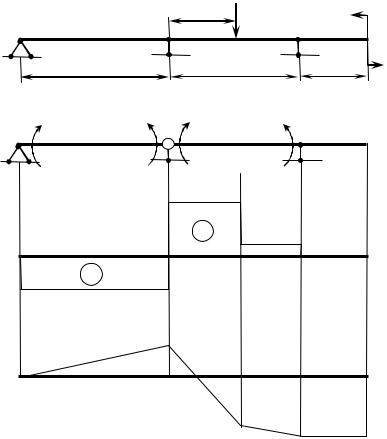
Приклад 9.4. |
Для статично невизначної рами (рис. 9.5 а) побудувати епюри M , Q , N |
|||||
|
q 20kH м |
|
|
|
||
C |
|
|
|
C |
B |
2 |
|
|
|
|
B |
X1 |
2 |
|
2 м |
|
|
|||
x |
x |
|
2 м |
|
||
|
|
|
|
|||
3 м |
|
|
|
3 м |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
M1 |
|
A |
|
|
|
A |
|
|
|
|
a) |
|
б) |
в) |
40 |
|
10 |
|
|
|
2 |
|
2 |
|
|
38 |
||
|
|
|
|
|||
|
|
|
|
|
||
|
|
2 |
|
38 |
19 |
9 |
|
|
|
|
|
||
|
3 |
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
M q |
|
M1 X1 |
M |
|
|
г) |
|
|
д) |
е) |
рис. 9.5
- 75 -
|
19 |
21 |
21 |
|
|
Q |
N |
ж) |
з) |
рис. 9.5
1.В рамі 4 опорні зв’язки (три в точці A і один в точці B ), отже 4 невідомі опорні реакції. Для їх визначення можна скласти три рівняння статики. Отже, рама один раз статично невизначна, має один зайвий зв’язок, в якому виникає одна зайва невідома X1 .
2.Відкинувши один зв’язок, вибирають основну систему (рис. 9.5 б).
3.Канонічне рівняння для визначення X1 : 11 X1 1F 0 .
4. Способом Верещагіна визначають коефіцієнти 11 і 1F . Епюри M1 (від X 1 1) і M F (від заданого навантаження q ) показані на рис. 9.5 в, г. Тоді
E J z 11 12 2 2 23 2 2 3 2 443 ;
E J z 1F 13 40 2 43 2 40 3 2 8403 ;
(в останньому виразі враховано, що площа показаних на рис. 9.5 г параболи 13 b h , а
відстань центра від вершини параболи рівна 43 b , де b , h - ширина і висота параболи).
5. Канонічне рівняння набирає вигляду
|
44 |
X |
|
|
840 |
0 , звідки X |
|
19 кН . |
|
|
1 |
|
1 |
||||
3 |
|
3 |
|
|
||||
|
|
|
|
|
||||
6. Будують епюру M x , скориставшись виразом (9.10) |
||||||||
|
|
|
|
M x M1 X1 M F . |
||||
Епюра M1 X1 показана на рис. 9.4 д, а епюра M - на рис. 9.5 е. Повздовжні і поперечні сили в |
||||||||
стержнях рами (спосіб визначення приведено в п. 8.4): |
|
|
||||||
BC 0 x 2 |
|
CD 0 x 3 м |
|
|
||||
Q x X1 q x 19 20 x ; |
|
Q x 0 |
|
|
||||
N 0 |
|
N X1 q 2 19 40 21 кН |
||||||
Епюри Q x і N , що побудовані за цими виразами, показані на рис. 9.4 ж, з.
- 76 -
Приклад 9.5. Для статично невизначної рами (рис. 9.6 а) побудувати епюру M x .
3 м |
F 30kH |
|
|
|
|
1м |
|
|
|
|
2 м |
|
|
|
|
M 50kH м |
|
|
|
|
|
|
|
X1 |
|
|
|
|
X 2 |
|
a) |
|
|
б) |
|
|
1 4 |
RB 3 4 |
|
RA 1 2 |
R |
A |
||
|
|
|
||
|
|
|
|
|
|
1 2 |
|
|
|
2
|
|
3 2 |
RB 1 2 |
|
|
|
|
|
|
|
|
|
|
|
M |
1 |
|
X1 1 |
|
|
|
|
|
|
|
в) |
|
|
|
RA 12,5kH |
|
|
|
|
HA 30kH |
12,5 |
|
|
F 30kH |
|
|
|
||
|
|
|
|
|
|
|
37,5 |
RB 12,5kH |
|
|
|
|
|
|
M F |
M 50kH м |
|||
|
|
|
||
|
50 |
|
|
|
|
д) |
|
|
|
9
M2 X2
ж)
рис. 9.6
3 4
4
M 2
г) |
|
|
1 |
|
X 2 |
||
|
|
||
|
51 |
|
|
|
68 |
||
17 
3 2
2
M1 X1
е)
42
68
26 
3 2
2
M
з)
1.Кількість опорних зв’язків – 5. Кількість рівнянь статики – 3. Рама два рази статично невизначна і є дві зайві невідомі X1 , X 2 .
2.Вибрана для розрахунку основна система показана на рис. 9.6 б.
-77 -
3. Система канонічних рівнянь
11 X1 12 X 2 1F 0 |
|||
|
21 |
X1 22 |
X 2 21F 0 |
|
|||
4.Епюри M1 (від одиничної сили X 1 1), M 2 (від сили X 2 1) і M F (від заданого навантаження M , F ) показані на рис. 9.6 в, г, д. Тоді:
E J z 11 12 12 1 23 12 12 23 3 23 23 12 2 2 23 2 5.0 ;
E J z 12 E J z 2 1 12 43 1 23 12 12 43 3 23 23 1.0 ;
E J z 22 12 1 43 1 23 43 12 3 43 23 43 0.75 ;
E J z 1F 50 2 12 2 12 337.5 23 23 12 1 12.5 23 12 158.3 ;
EJ z 2 F 12 1 12.5 23 43 12 3 37.5 23 43 25.0 .
5.Система канонічних рівнянь має вигляд
5 X1 X 2 158.3 0X1 0.75 X 2 25.0 0
6.Епюри M1 X1 і M 2 X 2 показані на рис. 9.6 е, ж. Епюра M x , що побудована за формулою M x M1 X1 M2 X2 MF , приведена на рис. 9.6 з.
9.4. Багатопрольотні нерозрізні балки.
Нерозрізними балками називають балки, що опорах і не мають проміжних шарнірів (рис. 9.7 а).
M1 M 2
l1 |
l |
2 |
|
l |
3 |
|
|
2 |
|
||
0 |
1 |
|
|
3 |
|
|
Mn 1 |
|
M n |
|
Mn 1 |
|
l n |
|
l n 1 |
||
|
n 1 |
|
n |
|
n 1 |
l 0
рис. 9.7
лежать більш ніж на двох шарнірних
|
Такі |
балки |
є |
статично |
|||
a) |
невизначними |
і |
для |
їх |
|||
розв’язування можна використати |
|||||||
|
|||||||
|
розглянутий вище метод сил. Для |
||||||
|
отримання |
основної |
системи |
||||
|
можна |
або |
відкидати |
опори, |
або |
||
б) врізати в балку шарніри. Другий спосіб є ефективнішим, коли
шарніри врізати над проміжними опорами (рис. 9.7 б). Зайвими в) невідомими в цьому випадку будуть моменти M1 , M 2 , ... над
|
опорами з врізаними шарнірами. |
|
|
При такому підході до розкриття |
|
г) |
статичної невизначності канонічні |
|
рівняння методу сил зводяться до |
||
|
||
|
системи рівнянь трьох моментів. |
|
|
Для “ n “ – ої опори це рівняння |
|
|
має вигляд (рис. 9.7 в) |
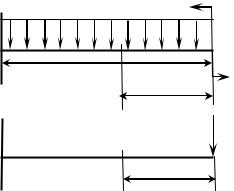
Mn 1 ln 2 Mn ln ln 1 Mn 1 ln 1 6 E J z 'n 'n' |
|
(9.11) |
- 78 -
де 'n , 'n' - лівий і правий кути повороту над n - ою опорою. Рівнянь трьох моментів можна
складати стільки, скільки раз задача статично невизначна. При складанні рівнянь опори і довжини прольотів нумерують: опори прийнято нумерувати зліва направо, позначивши крайню ліву опору індексом “ 0 “ (рис.9.7 б). Номер прольоту визначається номером правої для цього прольоту опори. Якщо якийсь край балки защемлений, то защемлення зображують (рис. 9.7 г) у виді поставлених близько одна від одної шарнірних опор (відстань l 0 ). Для того, щоб з
рівнянь типу (9.1) |
визначити опорні моменти, |
потрібно знати вирази для кутів |
' |
і |
'' при |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
n |
різних видах навантаження. Значення цих кутів: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
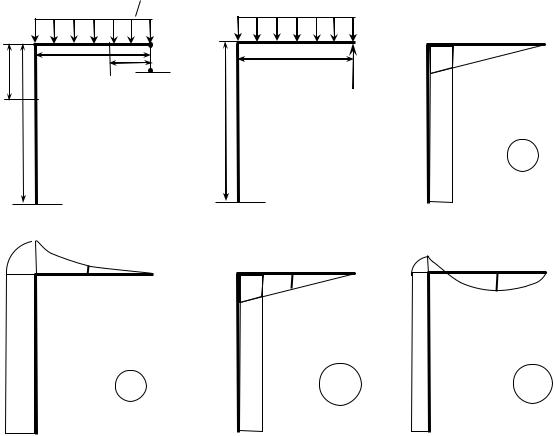
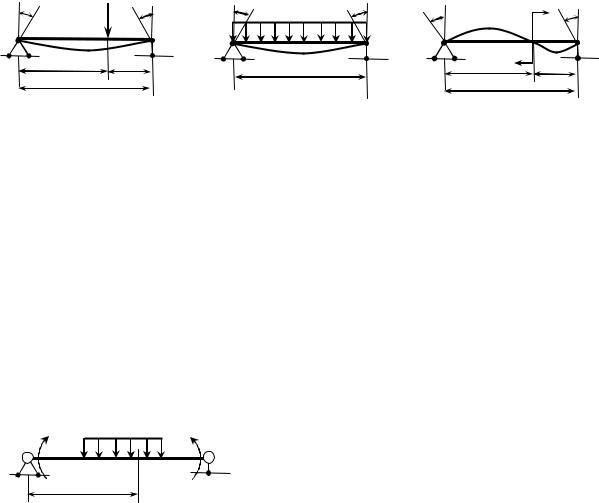
а) для балки, навантаженої зосередженою силою F (рис. 9.8а) |
|
|
|
|
|
|||||||||||||||||
|
E J |
|
' |
F a b |
l b |
, E J |
|
|
'' |
F a b |
l a |
|
|
|
(9.12) |
|||||||
|
z |
|
z |
|
|
|
|
|
||||||||||||||
|
|
|
6 l |
|
|
|
|
|
|
|
|
6 l |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Якщо сила F прикладена посередині прольоту |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
E J |
|
' |
E J |
|
'' |
|
F l 2 |
|
|
|
|
|
(9.13) |
||||
|
|
|
|
|
z |
z |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
16 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
F |
|
|
|
|
|
q |
|
|
|
|
|
|
|
M |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
a |
b |
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
a |
b |
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
a) |
|
|
|
|
|
|
|
б) |
|
|
|
|
|
|
|
|
|
|
в) |
|
|
|
|
|
|
|
|
|
|
|
рис. 9.8 |
|
|
|
|
|
|
|
|
|
|
|
|||
б) для балки під рівномірно розподіленим навантаженням інтенсивності q (рис. 9.8 б)
|
|
|
|
|
E J |
|
' E J |
|
'' |
q l 3 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
z |
z |
24 |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в) для балки, навантаженої парою сил з моментом M (рис. 9.8 е) |
|
|
|
|
|||||||||||||||||||
' |
|
M l |
|
a 2 |
|
|
|
|
'' |
|
|
M l |
|
|
b 2 |
|
|||||||
E J z |
|
|
|
1 3 |
|
|
|
, |
E J z |
|
|
|
|
|
|
1 |
3 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
6 |
|
l |
|
|
|
|
|
|
|
|
6 |
|
|
|
l |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Якщо момент прикладено посередині прольоту, то |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
E J |
|
' E J |
|
'' |
F l 2 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
z |
z |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
16 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(9.14)
(9.15)
(9.16)
M
n 1
де MF x ,
n 1
x
QF x
|
|
Після розв’язування системи рівнянь трьох |
||||||||||||||||
q |
M n |
моментів і визначення з них |
|
невідомих |
опорних |
|||||||||||||
моментів згинальний момент |
|
|
M |
x |
і поперечна сила |
|||||||||||||
|
|
Q x в n - му прольоті балки (рис. 9.9) визначаються |
||||||||||||||||
l n |
|
за формулами: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M x M F x M n 1 |
M |
n |
M |
n 1 |
|
|
|
|
||||||||
|
n |
|
|
|
|
|
x |
|
||||||||||
|
|
|
|
|
ln |
|
|
|
||||||||||
рис. 9.9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(9.17) |
||
|
Q x QF x |
M |
|
M |
|
|
|
|
|
dM x |
|
|||||||
|
|
n |
n |
1 |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
l |
n |
|
|
|
|
|
|
dx |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- згинальний момент та поперечна сила від навантаження, що діє в даному прольоті.
- 79 -
|
|
|
|
|
|
|
|
|
|
|
|
F 40kH |
|
|
|
|
M 30kH м |
|
Приклад 9.6 |
Для балки, схема |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1м |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
якої показана на рис. 9.10, |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a) |
|
побудувати |
епюри |
|
M x |
і |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q x . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 м |
|
|
|
|
|
|
|
2 м |
|
|
|
|
|
|
|
|
1м |
|
|
|
|
|
|
|
Балка має 4 опорні зв’язки. Для |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
M |
0 |
|
|
|
|
|
M1 |
|
|
|
|
|
|
|
|
|
M |
2 |
M 30kH м |
|
визначення |
|
реакцій |
|
можна |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
скласти |
3 |
рівняння |
|
статики. |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Задача |
один |
раз |
|
|
статично |
||||||
|
|
|
|
|
l1 |
|
|
|
|
|
|
|
|
l 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
0 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
невизначна. |
Вибираємо основну |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
систему, |
врізавши над |
єдиною |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
41 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
проміжною |
опорою |
|
шарнір |
і |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
приклавши |
в |
ньому |
|
невідомий |
||||||
Q x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
в) |
|
момент M1 |
(рис. 9.10 |
б). |
Для |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
визначення |
|
цього |
|
|
моменту |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
складають |
рівняння |
трьох |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
моментів (9.11) для опори “ 1 “ |
|||||||||
|
|
|
|
|
|
|
|
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(поклавши n 1): |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M0 l1 2 M1 l1 l 2 M 2 l2 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
M |
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
г) |
|
|
6 E J z 1' 1'' , |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
де |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
29 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
30 |
|
|
l1 3 м, l2 2 м, M0 0, |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
30 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M2 30 кН м |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
рис. 9.10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Кути повороту: E J |
|
' 0 |
(на |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
прольоті 0 - 1 немає навантаження) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
'' |
|
|
F l |
2 |
|
|
40 22 |
10 . |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
E J |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
16 |
|
|
16 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Рівняння набирає вигляду: |
10 M1 30 2 6 0 10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
10 M1 120 , |
|
M1 12 кН м . |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
Вирази для M x і Q x на ділянках балки знаходимо за формулами (9.17): |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
ділянка 0 – 1 |
0 x 3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
1 |
M |
0 |
|
|
|
|
|
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
M x |
M F x M 0 |
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
x 4 x |
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
l1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
(а) |
|||||
|
|
|
|
|
|
|
|
|
Q x Q |
|
x |
|
|
M1 M 0 |
|
|
12 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ділянка 1 – 2 |
0 x 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
x 20 x , 0 x 1 |
|
|
|
|
|
|||
M x M F x |
M1 |
M |
2 |
M |
1 |
x , |
|
|
де |
|
M F x |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
l2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
x |
F x 1 40 20 x , 1 x 2 |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тоді: |
|
|
|
|
|
|
|
|
|
|
|
|
30 12 |
|
|
|
|
|
|
|
|
|
|
|
|
, 0 x 1 |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
20 x |
|
|
|
|
|
|
|
|
|
41 x 12 |
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
M |
x |
|
|
|
|
|
|
12 |
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
1 x 2 |
|
|
|
|
|
|
|
(б) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
40 20 x |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
x 28 , |
|
|
|
|
|
|
|
|
|
||||||||||||||
- 80 -