Konspekt_SM_3_ukr
.pdfЗаписавши вирази для σmax |
і σ max |
і знаючи допустиме напру- |
розтяг |
стиск |
|
ження, можна знайти розміри перерізу. З двох знайдених розмірів беремо більший.
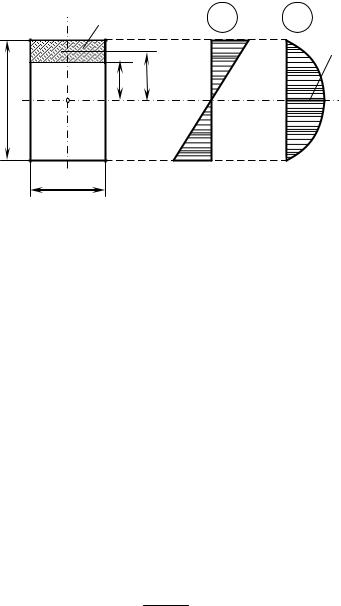
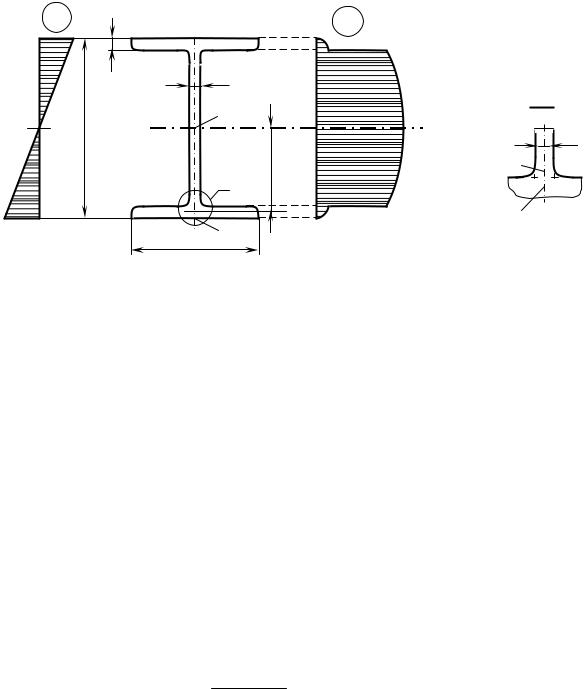
Приклад. Підібрати балку двотаврового поперечного перерізу для схеми вантаження, представленої на рис.13.1, а, якщо [σ ]= 160 МПа.
З формули (13.11)
Wx ³ |
M |
max |
= |
20 ×10 −3 |
×10 6 = 125 см 3 . |
|
160 |
||||
|
[σ ] |
|
|
||
Із сортаменту |
(ГОСТ |
8239-72) |
вибираємо двотавр 18, у якого |
||
Wx = 143 см3 .
14 ПОПЕРЕЧНЕ ЗГИНАННЯ
14.1Дотичні напруження при поперечному згинанні. Формула Журавського
При чистому згинанні в поперечних перерізах бруса виникають тільки згинальні моменти, які викликають нормальні напруження. У разі попе-
речного згинання в перерізах бруса виникають не тільки згинальні момент М, але і поперечна сила Q.
Сила Q є рівнодіючою елементарних сил, лежачих в площині перерізу (рис 14.1), під дією яких в поперечних перерізах бруса виникають не тільки нормальні σ, але і дотичні напруження τ.
Виникнення дотичних напружень τ супроводжується появою кутових деформацій. Тому, окрім основних зсувів, властивих чистому згинанні σ, кожна елементарна площадка перерізу dF одержує деякі додаткові кутові зсуви, обумовлені зсувом. Оскільки дотичні напруження розподілені за перерізом нерівномірно, то так само нерівномірно будуть розподілені і кутові зсуви. Це означає, що при поперечному згинанні, на відміну від чи-
141
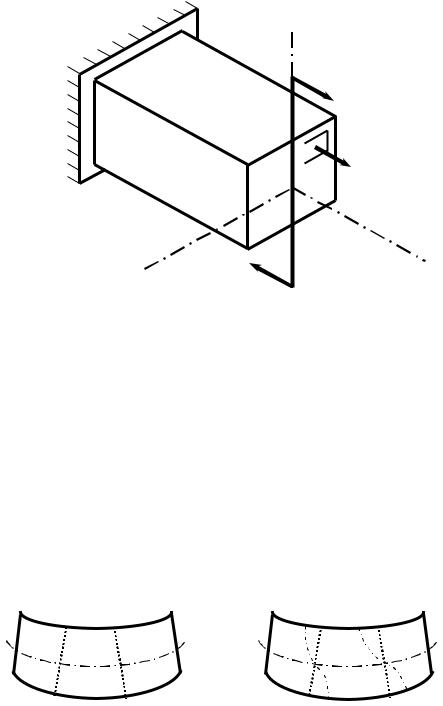
стого згинання, поперечні перерізи бруса не залишаються плоскими, вони скривлюються (або депланують), як це показано на рис 14.2.
y
M

 τ σ
τ σ
 Q
Q
x |
z |
Рисунок 14.1
Проте на величині нормальних напружень депланація поперечних перерізів помітним чином не позначається. Зокрема, якщо поперечна сила Q не міняється за довжиною бруса, то нормальні напруження можуть бути визначена за вже відомою формулою
σ = |
M x |
y |
|
(14.1) |
|
. |
|||
|
I y |
|||
|
|
|
||
a |
б |
Рисунок 14.2
Формула (14.1) виведена для випадку чистого згинання, проте вона дає абсолютно точні результати і у разі поперечного згинання. Дійсно, при
142
Q=const викривлення всіх перерізів відбувається однаково (див.
рис.14.2,б).
При поперечній силі, що змінюється уздовж осі бруса, формули, виведені для випадку чистого згинання, дають для σ деяку погрішність. Вона дуже мала і залежить від співвідношення (h / l)2 , де l – довжина бруса.
Характерною ж особливістю бруса є те, що величина дуже мала і відповідно малою виявляється вказана погрішність. Усе сказане дає підставу прийняти гіпотезу плоских перерізів і для поперечного згинання.
Другою особливістю поперечного згинання є наявність нормальних напружень в подовжніх перерізах бруса, тобто напружень “натискання” між волокнами. Ці напруження виникають тільки при змінній поперечній силі Q і мають вельми малу величину (виключаючи з розгляду особливі області, в зоні яких прикладаються зосереджені сили).
Таким чином, в межах вказаних допущень формули, виведені для визначення нормальної напружень і кривизни бруса при чистому згинанні, застосовні для випадку поперечного згинання:
σ = |
M x |
× y ; |
σ max = |
M x |
; |
1 |
= |
M x |
|
|
ρ |
EIx |
|||||
|
Ix |
|
Wx |
|
||||
Виведемо формулу для визначення τ в простому випадку згинання балки прямокутного поперечного перерізу (втім, форма перерізу не впливає на зміст формули).
При цьому зробимо наступні припущення:
а) напрями дотичних напружень τ співпадають з напрямом попере-
чної сили Q;
б) дотичні напруження τ, що діють по площадках, розташованих на одній і тій же відстані у від нейтральної осі, рівні між собою.
Обчислити ці напруження простіше всього через парні їм дотичні напруження, які виникають в подовжніх перерізах бруса.
Розглянемо балку завдовжки l (рис.14.3). Двома близькими поперечними перерізами А1В1 і А2В2 виділимо елемент балки (рис.14.3, а) довжиною dz.
143

B1 |
B2 |
P |
y |
|
|
|
|
|
|
z |
|
|
|
|
|
|
|||
m1 |
m2 |
x |
B2 |
σ′ |
B1 |
B2 σ′′ |
|
||
A1 |
A2 |
|
B1 |
|
|||||
|
M |
M+dM |
N1 |
ττ τ |
|
N2 |
|||
|
|
|
|
||||||
z |
dz |
P |
Q |
Q |
y |
m1 m2 |
|
z |
|
|
|
z |
|
|
|
|
|
|
|
Q(z) |
Q(z) |
A1 |
A2 |
A1 |
|
dz |
A2 |
|
|
d z |
|
|
|
||||||
|
|
|
|
|
|
|
|
||
|
|
Q |
б |
|
|
|
в |
|
|
|
|
|
|
|
|
|
|
||
|
|
Å |
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
M(z) |
M(z)+dM |
|
|
|
|
|
|
|
|
Рисунок 14.3
Як видно з епюр (див. рис.14.3,а), в обох перерізах Q і M позитивні і
рівні відповідно: |
|
|
у перерізі А1В1 |
Q =Q(z); |
M = M (z), |
у перерізі А2В2 |
Q =Q(z); |
M = M (z)+ dM , |
що і показано на рис.14, б. |
|
|
Подовжнім горизонтальним перерізом, проведеним на відстані у від нейтрального шару (див. рис.14.3, в), розділимо елемент на дві частини і розглянемо умови рівноваги верхньої частини (рис.14.4).
Рівнодіюча нормальних сил, що діють на ліву грань виділеного пара-
лелепіпеда, дорівнює |
|
N1 = òσ dF , |
(14.2) |
F |
|
де F* – площа частини поперечного перерізу від рівня у до зовнішньої поверхні балки.
144

|
y |
dF |
F* |
|
|
||
|
|
|
|
N1 |
|
|
y1 |
τ |
|
|
N2 y |
τ |
|
|
|
x |
|
|
z |
|
|
|
dz b
Рисунок 14.4
Підставляючи у формулу (14.2) формулу (14.1) і враховуючи, що в кожному перерізі M x і Ix постійні, одержимо
N1 = M ò y1dF,
Ix F*
де y1 – поточна ордината площадки dF .
Вираз ò y1dF – статичний момент щодо осі х відсіченої частини
F*
площі, тобто площі, розташованій вище за рівень у. Позначимо його через Sx*. Тоді
N1 = |
MS* |
|
x |
. |
|
|
||
|
I x |
|
Аналогічно знайдемо рівнодіючу нормальних сил, таку, що діє на праву грань паралелепіпеда:
N |
2 |
= (M + dM ) |
× |
ò |
y dF = (M + dM )× S*x . |
||
|
Ix |
|
1 |
Ix |
|||
|
|
|
F |
* |
|
||
|
|
|
|
|
|
|
|
145

Різниця цих сил
N2 - N1 = |
dM × S*x |
(14.3) |
|
Ix |
|||
|
|
повинна врівноважуватися дотичними силами в подовжніх перерізах елемента, тобто на нижній грані паралелепіпеда (див. рис 14.4)
Як перше наближення допустимо, що дотичні напруження розподілені за шириною перерізу рівномірно. Тоді результуюча Т дотичних зусиль, що діють на нижній грані паралелепіпеда, дорівнює
T =τ ×bdz . |
(14.4) |
Проектуючи всі сили, що діють на паралелепіпед, на вісь z, одержи-
мо:
å Pkz = 0 ; |
N1 + T − N2 = 0. |
(14.5) |
Підставивши у вирази (14.5) формули (14.3) і (14.4), знаходимо:
dM × S*x =τ ×bdz,
Ix
звідки дотичні напруження
τ = |
dM |
× |
S*x |
. |
dz |
|
|||
|
|
b × Ix |
||
Враховуючи, що згідно з залежністю (5.4)
dMdz = Q ,
знаходимо остаточно
|
|
|
|
|
|
|
τ = |
Q×S*x |
|
|
|
|
I b |
|
|
(14.6) |
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|