

31. Вузлові характеристики дискретної моделі
Вузли дискретної моделі можуть бути характеризовані із статичного і кінематичного погляду. Кінематичними характеристиками є вузлові переміщення, а статичними — вузлові наванта-ження і вузлові реакції.
Будь-який вільний жорсткий вузол і дискретної моделі має три ступені вільності, тобто можлитсть двох поступальних Δхі, Δуі і одного кутового переміщення Δφі цього вузла .
Статичною характеристикою вузлів дискретної моделі є вузлові навантаження. В кожному вузл і припускаеться можливість дії трьох компонентів зовнішніх зосереджених силових дій: Fxi — сила, яка спрямована вздовж осі х загальної системи координат;Fyi— сила, яка діє вздовж осі у;Fφi— зосереджений момент.
Ще одна статична характеристика вузлів — вузлові реакції. Під впливом зовнішніх дій вузли дискретної моделі переміщуються, а стержні, які їх поєднують, деформуються. Між вузлами і стержнями виникають реакції взаемодії, що зумовлені тільки переміщеннями вузлів. Сумарні реакції всіх стержнів, які приєднуються до вузла і, зобразимо у вигляді двох зосереджених сил, що орієнтовані вздовж осей глобальної системи координат всієї моделі, і зосередженого моменту. Позначимо щ реакції через Rxi, Ryi, Rφi-
Реакції, які передаються на вузол і з боку стержнів, і на стержні, що приєднуються до вузла, однакові за величиною, але спрямовані в протилежних напрямах. Зазвичай для реактивних сил, з якими вузли діють на стержні, за додатні приймають напрями, які збігаються з додатними напрямами вузлових перемщень. Тоді реакції, які передаються на вузли з боку стержнів, будуть спрямовані у протилежних напрямах.
32. Кінцеві характеристики скінченних елементів у локальній системі координат
У процесі деформування споруди її вузли, отже і кінці стержів переміщуються, внаслідок чого на кінцях виникають реакції взаємодії стержнів з вузлами дискретної моделі.
Необхідно звернути увагу на те, що кінцеві переміщення і кінцеві реакції нумеруються в суворо у визначеному порядку.
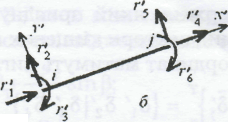
Повний вектор переміщень скінченного елемента е в локальній системі координат матиме вигляд:
δ’e ={δ’i δ’j}= {δ’1δ’2δ’3|δ’4δ’5δ’6 }
Так само можна записати вектор кінцевих реакцій стержня в локальній систем координат: r'e.
33. Кінцеві характеристики скінченних елементів у глобальній системі координат
Кінцеві переміщення і реакції можуть бути представлені у вигляді компонентів, які являють собою проекції відповідних величин на осі глобальної і локальної систем координат. Позначення і додатні напрями зазначених компонентів для стержня, жорстко прикріпленого до вузлів, представлено на рис. 12.9, а, б, а для стержня, який приеднуеться до вузлів шарнірно — на рис. 12.9, в, г.
Нумерація цих величин також суворо фіксована і аналогічна нумерації в локальній системі координат.
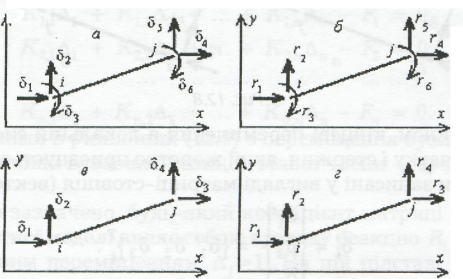
Рис 12.9
Кінцеві переміщення і кінцеві реакції в глобальній системі координат можуть бути представлені у вигляді векторів: δe і re.
Крім кінцевих переміщень, на стержневий скінченний елемент можуть діяти рівномірно розподілені навантаження, які орієнтуються за осями або локальної або глобальної систем координат, а також реакції, які зумовлюються розподіленими вздовж стержня навантаженнями. Нумерація вантажних реакцій також сувор визначена.