

2.1.2 Структура и принцип работы низковольтного преобразователя частоты на igbt транзисторах
Типовая схема низковольтного преобразователя частоты представлена на рис. 7. В нижней части рисунка изображены графики напряжений и токов на выходе каждого элемента преобразователя.
Переменное напряжение питающей сети (Uвх.) с постоянной амплитудой и частотой (Uвx = const, fвх = const) поступает на управляемый или неуправляемый выпрямитель (1).
Для сглаживания пульсаций выпрямленного напряжения (Uвыпр.) используется фильтр (2). Выпрямитель и емкостный фильтр (2) образуют звено постоянного тока.
С выхода фильтра постоянное напряжение Ud поступает на вход автономного импульсного инвертора (3).

Рис. 7. Типовая схема низковольтного преобразователя частоты.
В инверторе осуществляется преобразование постоянного напряжения Ud в трехфазное (или однофазное) импульсное напряжение ни изменяемой амплитуды и частоты. По сигналам системы управления каждая обмотка электрического двигателя подсоединяется через соответствующие силовые транзисторы инвертора к положительному и отрицательному полюсам звена постоянного тока. Длительность подключения каждой обмотки в пределах периода следования импульсов модулируется по синусоидальному закону. Наибольшая ширина импульсов обеспечивается в середине полупериода, а к началу и концу полупериода уменьшается. Таким образом, система управления обеспечивает широтно-импульсную модуляцию (ШИМ) напряжения, прикладываемого к обмоткам двигателя. Амплитуда и частота напряжения определяются параметрами модулирующей синусоидальной функции.
При высокой несущей частоте ШИМ (2 ... 15 кГц) обмотки двигателя вследствие их высокой индуктивности работают как фильтр. Поэтому в них протекают практически синусоидальные токи.
В схемах преобразователей с управляемым выпрямителем (1) изменение амплитуды напряжения Uи может достигаться регулированием величины постоянного напряжения Ud, а изменение частоты - режимом работы инвертора.
При необходимости на выходе автономного инвертора устанавливается фильтр (4) для сглаживания пульсаций тока. (В схемах преобразователей на IGBT в силу низкого уровня высших гармоник в выходном напряжении потребность в фильтре практически отсутствует.)
Таким образом, на выходе преобразователя частоты формируется трехфазное (или однофазное) переменное напряжение изменяемой частоты и амплитуды (Uвых = var, fвых = var).
2.2 3Аконы и алгоритмы управления реализуемые в электроприводе с преобразователем частоты acs 2000
2.2.1 Особое место в САУ на основе векторного способа управления АД занимают с прямым управлением момента, которые в настоящее время вызывают интерес у разработчиков и исследователей во многих странах мира. Такие системы получили название (DIRECT TORQUE CONTROL (DTC)). Наибольшее распространение на нашем рынке получили комплектные электроприводы типа ACS 600, ACS 800 и ACS 1000, ACS 2000, выпущенных фирмой АВВ. Эти электроприводы отрабатывают стопроцентный скачок задания момента за 1-2 мс, обеспечивают точное регулирование момента при низких частотах, включая и нулевую скорость,
обеспечивают точность поддержания угловой скорости на уровне 10% скольжения АД без использования датчика частоты вращения и 0,01 %-с использованием датчика.
Системы DTC имеют ряд характерных признаков, которые резко отличают их от других систем на основе векторного управления:
-наличие в системе релейных гистерезисных регуляторов магнитного потока статора и электромагнитного момента АД;
-наличие в системе электронной модели двигателя для вычисления управляемых координат (потокосцепления статора двигателя, электромагнитного момента двигателя, а также частоты вращения ротора двигателя для бездатчиковых систем)
-наличие табличного (матричного) вычислителя относительного вектора напряжения двигателя;
-отсутствие в явной выраженной форме регуляторов статора двигателя; -наличие идентификатора фазового сектора, в котором в текущий момент времени находится вектор потокосцепления статора двигателя;
-отсутствие программной широтно-импульсной модуляции выходного напряжения преобразователя частоты.
В электроприводе с преобразователями частоты ACS 2000 имеется возможность смены законов управления в зависимости от решаемой задачи. Реализуются законы частотного и разрывного управления режимами АД. Основным отличием систем DTC-управления является то, что в системе DTC каждое переключение силового транзисторного ключа инвертора определяется релейным регулятором с зоной нечувствительности, исходя из текущих значений магнитного потока и вращающего момента.
Основные свойства систем автоматического управления (САУ), оптимизируемых с использованием методов DTC-управления:
- Системы со скользящими режимами являются реализацией глубокой обратной связи по регулируемым координатам.
- Порядок уравнения движения в скользящем режиме понижается.
- САУ со скользящим режимом груба к неточности информации о постоянных времени и коэффициентах усиления, а также к возмущениям.
Использование методов разрывного управления со скользящим режимом для построения идентификаторов состояния предопределяет такие их свойства, как высокая точность, быстродействие и инвариантность к изменениям параметров объекта и возмущениям.
Система управления электроприводом, синтезированная с применением методов, учитывающих нелинейный характер объекта управления и разрывный характер процессов в силовом преобразователе, обеспечивает:
-упрощение алгоритма синтеза из-за отсутствия необходимости организации сигналов,компенсирующих внутренние перекрестные обратные связи объекта;
-инвариантность к внешним и параметрическим возмущениям, благодаря чему просто решаются проблемы идентификации постоянной времени
ротора
и точности углового положения опорного
вектора
![]() ;
;
-слияние задач организации САУ частотно-управляемым электродвигателем
и ШИМ- управлением автономным инвертором.
На рис.8 приведена блок-схема преобразователя с реализацией DTC - управления.
Задание частоты вращения ротора подается на вход задатчика интенсивности, который обеспечивает постоянство ускорения при разгоне. Как и в классической системе векторного управления при синтезе контура регулирования скорости на выходе регулятора скорости целесообразна установка апериодического фильтра первого порядка. В зависимости от требований к статической ошибке в установившемся режиме в контуре скорости без существенной погрешности вместо П И Д -регулятора скорости может быть использован П И - регулятор. В регуляторе скорости сравнивается заданное значение частоты вращения ротора с текущим расчетным значением и формируется задание на электромагнитный момент. На выходе регулятора скорости устанавливается звено ограничения величины электромагнитного момента.
В
релейных регуляторах момента и
потокосцепления сравниваются заданные
значения регулируемых величин с их
значениями, оцененными с помощью
наблюдателя, и формируются сигналы для
блока выбора вектора напряжения, который
и управляет ключами инвертора. Управление
ключами ведется с учетом текущего угла
потока статора
![]() . Для достижения желаемого значения
частоты коммутации ключей характеристики
релейных регуляторовпотокосцепления
и момента должны содержать гистерезисный
допуск, регулируемый в зависимости от
текущей частоты вращения магнитного
поля.
. Для достижения желаемого значения
частоты коммутации ключей характеристики
релейных регуляторовпотокосцепления
и момента должны содержать гистерезисный
допуск, регулируемый в зависимости от
текущей частоты вращения магнитного
поля.
Наиболее
важной частью системы DTC-
управления является адаптивный
наблюдатель регулируемых координат, а
именно, момента, потокосцепления и
частоты вращения. Эти координаты могут
быть получены на основании информации
о текущих значениях тока и напряжения
статора, причем напряжение статора
определяется в блоке вычисления
напряжения на основании информации о
напряжении звена постоянного тока
![]() преобразователя
частоты и текущем номере вектора
напряжения N4.
Оценки
указанных величин моту г быть выполнены
на основании следующих уравнений :
преобразователя
частоты и текущем номере вектора
напряжения N4.
Оценки
указанных величин моту г быть выполнены
на основании следующих уравнений :
![]()
![]()
![]()

Частота
вращения ротора вычисляется на основании
вычисления частоты вращения магнитного
поля, которая равна угловой частоте
вращения вектора потокосцепления
ротора. Для выполнения такого вычисления
необходимо дифференцировать угол
поворота вектора потокосцепления
ротора. Контур регулирования скорости
при этом работает с периодом дискретности
существенно, в десятки раз, превышающим
период дискретности контуров регулирования
потокосцепления и электромагнитного
момента двигателя. Для повышения точности
оценки
![]() разработан алгоритм линейной аппроксимации
значений угла потокосцепления ротора,
накопленных за шаг вычислений в контуре
регулирования скорости. Алгоритм основан
на выделении линейной составляющей
путем минимизации среднеквадратичной
ошибки. Это позволяет снизить требования
к фильтрации сигнала скорости без
внесения в систему дополнительного
запаздывания, чем достигается повышение
быстродействия системы в целом.
разработан алгоритм линейной аппроксимации
значений угла потокосцепления ротора,
накопленных за шаг вычислений в контуре
регулирования скорости. Алгоритм основан
на выделении линейной составляющей
путем минимизации среднеквадратичной
ошибки. Это позволяет снизить требования
к фильтрации сигнала скорости без
внесения в систему дополнительного
запаздывания, чем достигается повышение
быстродействия системы в целом.
Из-за использования операции интегрирования при вычислении потокосцепления статора система весьма чувствительна к значению активного сопротивления статора Rs, так как операция интегрирования приводит к накапливающейся ошибке. Неточность оценки активного сопротивления ротора Rr в данной системе, напротив, не оказывает существенного влияния на работу контуров регулирования потокосцепления и электромагнитного момента, однако влияет на точность вычисления скорости. Чувствительность системы к значениям индуктивностей двигателя невелика.
Наиболее важной задачей для системы DTC - управления является оценка потокосцепления статора двигателя. Именно ее точность определяет как работоспособность системы, так и качество регулирования. Как показано в , наблюдатель потокосцепления, построенный по приведенной выше схеме, в большинстве случаев неработоспособен. Для обеспечения работоспособности системы необходимо использовать алгоритмы адаптации, так как при рассогласовании оценки активного сопротивления статора Rs и его действующего значения система теряет устойчивость вследствие накопления ошибки. Для исходной оценки параметров асинхронного двигателя в предложено использовать режим предварительной идентификации, в ходе которого определяются активные сопротивления и индуктивности обмоток двигателя. Метод основан на подключении обмоток к источнику постоянного тока и не требует отключения двигателя от механизма.
Основные элементы схемы:
1 .Блок регуляторов и компараторов момента и потока, реализованный на быстродействующих DSP-микропроцессорах, где осуществляется
регулирование
в скользящем режиме вектора
![]() потокосцепления статора и момента М
двигателя по значениям вводимых в него
заданных и действительных величин.
потокосцепления статора и момента М
двигателя по значениям вводимых в него
заданных и действительных величин.
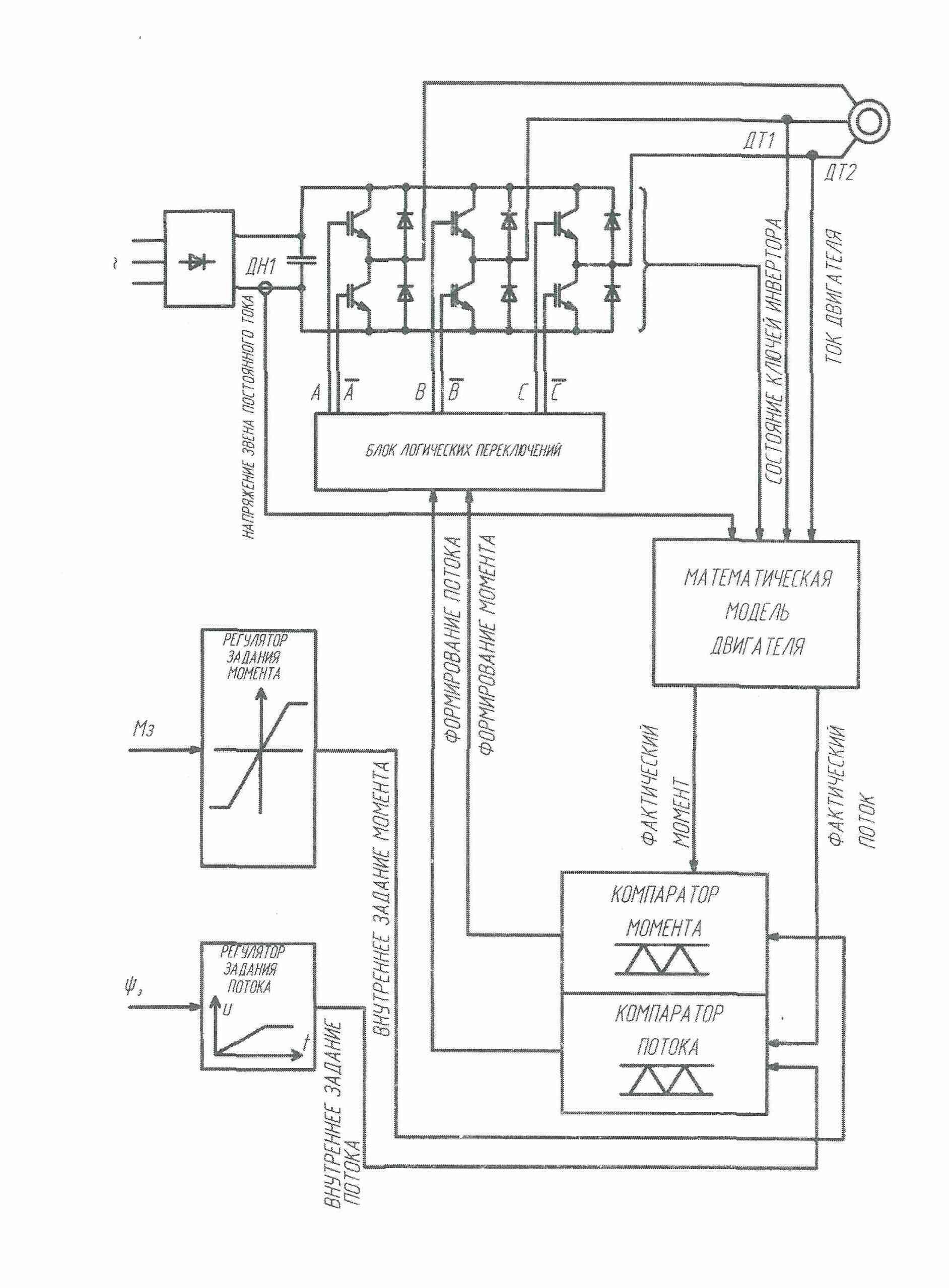
Рис. 8. Блок-схема преобразователя частоты с реализацией алгоритма DTC.
2. Модель асинхронного двигателя, в которой через каждые 25 мкс осуществляется вычисление потока статора и момента по введенной информации: токам двух фаз статора электродвигателя, напряжению цепи постоянного тока и положению ключей автономного инвертора напряжения (АНН). Модель двигателя формирует сигналы обратных связей по регулируемым параметрам.
3. Блок логических переключений - быстродействующий логический автомат, переключающий ключи автономного инвертора в функции «оптимизации» вектора выходного напряжения АНН по предельным отклонениям момента и потока статора, определяемым соответствующими настройками петли гистерезиса, Таким образом, организация ШИМ- управления осуществляется в функции заданных переменных электромагнитного состояния электродвигателя.