

Меха́ника (греч. μηχανική — искусство построения машин) — раздел физики, наука, изучающая движение материальных тел и взаимодействие между ними; при этом движением в механике называют изменение во времени взаимного положения тел или их частей в пространстве[1].
Механика занимается изучением так называемых механических систем.
Механическая
система обладает определённым
числом ![]() степеней
свободы,
а её состояние описывается с помощью
обобщённых координат
степеней
свободы,
а её состояние описывается с помощью
обобщённых координат ![]() и
соответствующих им обобщённых импульсов
и
соответствующих им обобщённых импульсов ![]() .
Задача механики состоит в изучении
свойств механических систем, и, в
частности, в выяснении их эволюции во
времени.
.
Задача механики состоит в изучении
свойств механических систем, и, в
частности, в выяснении их эволюции во
времени.
степени свободы — это совокупность независимых координат перемещения и/или вращения, полностью определяющая положение системы или тела (а вместе с их производными по времени — соответствующими скоростями - полностью определяющая состояние механической системы или тела - то есть их положение и движение).
Материа́льная то́чка (частица) — простейшая физическая модель в механике — обладающее массой тело, размерами, формой, вращением и внутренней структурой которого можно пренебречь в условиях исследуемой задачи.
Траекто́рия материа́льной то́чки — линия в пространстве, вдоль которой движется тело, представляющая собой множество точек, в которых находилась, находится или будет находиться материальная точка при своём перемещении в пространстве относительно выбранной системы отсчёта
Перемеще́ние (в кинематике) — изменение местоположения физического тела в пространстве относительно выбранной системы отсчёта. Также перемещением называют вектор, характеризующий это изменение[1]. Обладает свойством аддитивности. Длина отрезка — это модуль перемещения, в Международной системе единиц (СИ) измеряется в метрах.
Можно
определить перемещение, как
изменение радиус-вектора точки: ![]() .
.
Модуль перемещения совпадает с пройденным путём в том и только в том случае, если при движении направление скорости не изменяется. При этом траекторией будет отрезок прямой. В любом другом случае, например, при криволинейном движении, из неравенства треугольника следует, что путь строго больше.
Путь — длина участка траектории материальной точки
Система отсчёта — это совокупность тела отсчёта, связанной с ним системы координат и системы отсчёта времени, по отношению к которым рассматривается движение (или равновесие) каких-либо материальных точек или тел[2][3].
Математически
движение тела (или материальной точки)
по отношению к выбранной системе отсчёта
описывается уравнениями, которые
устанавливают, как изменяются с течением
времени t координаты,
определяющие положение тела (точки) в
этой системе отсчёта. Эти уравнения
называются уравнениями
движения.
Например, в декартовых координатах х,
y, z движение точки определяется
уравнениями ![]() ,
, ![]() ,
, ![]() .
.
Система координат — комплекс определений, реализующий метод координат, то есть способ определять положение точки или тела с помощью чисел или других символов. Совокупность чисел, определяющих положение конкретной точки, называется координатами этой точки.
Декартовы координаты
Расположение
точки P на
плоскости определяется декартовыми
координатами с
помощью пары чисел ![]()
-
 —
расстояние
от точки P до
оси y с
учетом знака
—
расстояние
от точки P до
оси y с
учетом знака -
 —
расстояние
от точки P до
оси x с
учетом знака
—
расстояние
от точки P до
оси x с
учетом знака
В
пространстве необходимо уже 3 координаты ![]()
-
 —
расстояние
от точки P до
плоскости yz
—
расстояние
от точки P до
плоскости yz -
 —
расстояние
от точки P до
плоскости xz
—
расстояние
от точки P до
плоскости xz -
 —
расстояние
от точки P до
плоскости xy
—
расстояние
от точки P до
плоскости xy
Полярные координаты

Полярные координаты.
В полярной системе координат, применяемой на плоскости, положение точки P определяется её расстоянием до начала координат r = |OP| и углом φ её радиус-вектора к оси OX.
В пространстве применяются обобщения полярных координат — цилиндрические и сферические системы координат.
Цилиндрические координаты
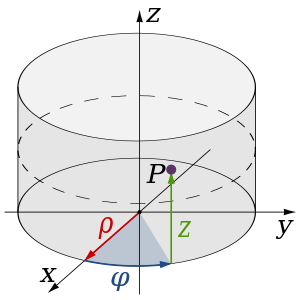
Цилиндрические координаты.
Цилиндрические
координаты —
трёхмерный аналог полярных, в котором
точка P представляется
упорядоченной тройкой ![]() В
терминах декартовой системы координат,
В
терминах декартовой системы координат,
-
 (радиус) —
расстояние от оси z до
точки P,
(радиус) —
расстояние от оси z до
точки P, -
 (азимут или
долгота) — угол между положительной
(«плюсовой») частью оси x и
отрезком, проведённым от полюса до
точки P и
спроектированной на плоскость xy.
(азимут или
долгота) — угол между положительной
(«плюсовой») частью оси x и
отрезком, проведённым от полюса до
точки P и
спроектированной на плоскость xy. -
 (высота)
равна декартовой z-координате
точки P.
(высота)
равна декартовой z-координате
точки P.
Примечание: в литературе для первой (радиальной) координаты иногда используется обозначение ρ, для второй (угловой, или азимутальной) — обозначениеθ, для третьей координаты — обозначение h.
Полярные координаты имеют один недостаток: значение φ не определено при r = 0.
Цилиндрические
координаты полезны для изучения систем,
симметричных относительно некоторой
оси. Например, длинный цилиндр с
радиусом R в
декартовых координатах (с осью z,
совпадающей с осью цилиндра) имеет
уравнение ![]() тогда
как в цилиндрических координатах оно
выглядит гораздо проще, как r = R.
тогда
как в цилиндрических координатах оно
выглядит гораздо проще, как r = R.
Сферические координаты
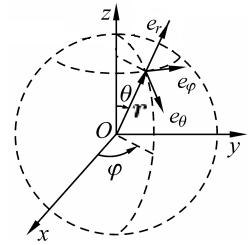
Сферические координаты.
Сферические координаты — трёхмерный аналог полярных.
В
сферической системе координат расположение
точки P определяется
тремя компонентами: ![]() В
терминах декартовой системы координат,
В
терминах декартовой системы координат,
-
 (радиус) —
расстояние от точки P до
полюса,
(радиус) —
расстояние от точки P до
полюса, -
 (азимут
или долгота) — угол между положительной
(«плюсовой») полуосью x и
проекцией отрезка, проведённого из
полюса до точки P,
на плоскость xy.
(азимут
или долгота) — угол между положительной
(«плюсовой») полуосью x и
проекцией отрезка, проведённого из
полюса до точки P,
на плоскость xy. -
 (широта
или полярный угол) — угол между
положительной («плюсовой») полуосью z и
отрезком, проведённым из полюса до
точки P.
(широта
или полярный угол) — угол между
положительной («плюсовой») полуосью z и
отрезком, проведённым из полюса до
точки P.
Примечание: в литературе иногда азимут обозначается θ, а полярный угол - φ. Иногда для радиальной координаты используется r вместо ρ. Кроме того, диапазон углов для азимута может выбираться как (−180°, +180°] вместо диапазона [0°, +360°). Наконец, полярный угол может отсчитываться не от положительного направления оси z, а от плоскости xy; в этом случае он лежит в диапазоне [−90°, +90°], а не в диапазоне [0°, 180°]. Иногда порядок координат в тройке выбирается отличным от описанного; например, полярный и азимутальный углы могут быть переставлены.
Сферическая система координат также имеет недостаток: φ и θ не определены, если ρ = 0; угол φ не определён также и для граничных значений θ = 0 и θ = 180° (или для θ = ±90°, в случае принятия соответствующего диапазона для этого угла).
Для построения точки P по её сферическим координатам нужно от полюса вдоль положительной полуоси z отложить отрезок, равный ρ, повернуть его на угол θ вокруг оси y в направлении положительной полуоси x, и затем повернуть на угол θ вокруг оси z в направлении положительной полуоси y.
Сферические
координаты полезны при изучении систем,
симметричных относительно точки. Так,
уравнение сферы с радиусом R в
декартовых координатах с началом отсчёта
в центре сферы выглядит как ![]() тогда
как в сферических координатах оно
становится намного проще:
тогда
как в сферических координатах оно
становится намного проще: ![]()
Скорость - векторная физическая величина, характеризующая быстроту перемещения и направление движения материальной точки относительно выбранной системы отсчёта; по определению, равна производной радиус-вектора точки по времени. Этим же словом называют и скалярную величину — либо модуль вектора скорости, либо алгебраическую скорость точки, т. е. проекцию этого вектора на касательную к траектории точки.
![]()
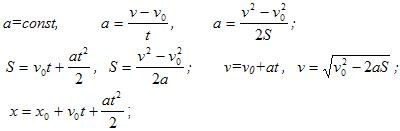
Равномерное движение: ν = const
![]()
Равнопеременное движение:
Криволинейное движение:
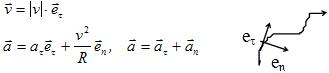
Вращательное движение:

Ускоре́ние (обычно
обозначается латинскими
буквами a (от лат. acceleratio)
или w) —
физическая величина, определяющая
быстроту изменения скорости тела, то
есть первая производная от скорости по
времени. Ускорение является векторной величиной,
показывающей, на сколько изменяется
вектор скорости ![]() тела
при его движении за единицу времени
тела
при его движении за единицу времени
Тангенциа́льное ускоре́ние — компонента ускорения, направленная по касательной к траектории движения.
Центростремительное (НОРМАЛЬНОЕ) ускорение — компонента ускорения точки, характеризующая быстроту изменения направления вектора скорости для траектории с кривизной. Направлено к центру кривизны траектории.
Враща́тельное движе́ние — вид механического движения. При вращательном движении материальной точки она описывает окружность. При вращательном движении абсолютно твёрдого телавсе его точки описывают окружности, расположенные в параллельных плоскостях. Центры всех окружностей лежат при этом на одной прямой, перпендикулярной к плоскостям окружностей и называемой осью вращения. Ось вращения может располагаться внутри тела и за его пределами. Ось вращения в данной системе отсчёта может быть как подвижной, так и неподвижной.