Prak_Geom1
.pdfНехай лiнiя другого порядку |
|
в прямокутнiй системi координат |
|
~~ |
задана рiвнянням |
|
° |
|
Oi j |
|
|
a11x2 + 2a12xy + a22y2 + 2a10x + 2a20y + a00 = 0; |
|
(1.148) |
|||
äå a12 6= 0. Знайдемо головнi напрямки i вiзьмемо ¨х за напрямки нових осей координат.
~c
Координати одиничного вектора p~(cos ®; sin ®) головного напрямку (де ® = (i; p~))
задовольня¹ рiвняння (1.142), тобто (a22 ¡ a11) cos ® sin ® + a12(cos2 ® ¡ sin2 ®) = 0. Розкри¹мо дужки i запишемо пiсля перетворень дане рiвняння таким чином:
(a11 cos ® sin ® + a12 sin2 ®) ¡ (a21 cos2 ® + a22 cos ® sin ®) = 0; 26
звiдки, пiсля винесення за дужки sin ® i cos ®, ми отрима¹мо рiвняння
(a11 cos ® + a12 sin ®) sin ® ¡ (a21 cos ® + a22 sin ®) cos ® = 0;
яке у виглядi визначника другого порядку запишеться так:
¯ |
a11 cos ® + a12 sin ® |
cos ® |
¯ |
|
|
¯ |
a21 cos ® + a22 sin ® |
sin ® |
¯ |
= 0: |
(1.149) |
¯ |
¯ |
||||
¯ |
|
|
¯ |
|
|
Якщо подивитись на стовпцi отриманого визначника, як на координати деяких векторiв, то рiвнiсть (1.149) згiдно теореми 1.11 означатиме, що цi вектори колiнеарнi, а тому за теоремою про колiнеарнi вектори (див. стор. 11) знайдеться таке число ¸, що буде мати мiсце система
рiвнянь |
½ a21 cos ® + a22 sin ® = ¸ sin ®; |
(1.150) |
|
||
|
a11 cos ® + a12 sin ® = ¸ cos ®; |
|
яка, як неважко бачити, рiвносильна системi |
|
|
|
(a11 ¡ ¸) cos ® + a12 sin ® = 0; |
|
|
½ a21 cos ® + (a22 ¡ ¸) sin ® = 0: |
(1.151) |
Розглядаючи дану однорiдну систему вiдносно невiдомих cos ® i sin ® ми бачимо, що вона ма¹ ненульовi розв'язки, оскiльки cos ® i sin ® одночасно не можуть дорiвнювати нулевi. Отже,
визначник цi¹¨ системи дорiвню¹ нулевi, а саме: |
¸ |
¯ |
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
¯ |
|
a21 |
|
a22 |
¡ |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
¯ |
a11 ¡ ¸ |
|
|
¯ |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
¯ |
a12 |
|
¯ |
= 0; |
|
(1.152) |
|||||||||
тобто ¸ |
2 |
¡ (a11 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
назива¹ться характеристичним |
||||||
|
+ a22)¸ + (a11a22 ¡ a¯ |
12) = 0. Рiвняння (1.152)¯ |
||||||||||||||||||||||||
рiвнянням лiнi¨ другого порядку. Розв'язавши його, ми отрима¹мо: |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
a |
|
|
|
|
|
|
|
a |
11 |
|
a |
2 |
|
a2 |
|
|
|
|
|
|
|
|
|
¸1;2 = |
|
11 + a22) § p(2 |
¡ |
|
22) + 4 |
12 |
: |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Îñêiëüêè (a |
a |
22 |
)2 + 4a2 |
, òî ¸ |
, ¸ |
2 |
дiйснi числа, причому, якщо ° не ¹ колом (тобто |
|||||||||||||||||||
(a11 ¡ a22) |
2 11 ¡2 |
|
|
12 > 0 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
+ 4a12 6= 0), òî ¸1 |
6= ¸2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Припустимо, що ¸ |
1 |
= 0, i нехай ~i 0(cos ®; sin ®) ¹ одиничний вектор головного напрямку, |
||||||||||||||||||||||||
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
який вiдповiда¹ кореню ¸1. Пiдставивши ¸1 в перше рiвняння системи (1.151), ми отрима¹мо
26Нагада¹мо, що a12 = a21.
91

(a |
11 ¡ |
¸ |
) cos ®+a |
|
sin ® = 0, звiдки знаходимо tg ® = |
¸1 ¡ a11 |
, тому за вiдомими формулами |
|||||||||
|
1 |
|
12 |
|
|
|
|
|
a12 |
|
||||||
тригонометрi¨ ма¹мо |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
1 |
|
|
|
|
|
tg ® |
(1.153) |
||||
|
|
|
|
|
cos ® = |
|
|
; |
sin ® = |
|
|
: |
||||
|
|
|
|
|
p |
|
p |
|
||||||||
|
|
|
|
|
1 + tg2 ® |
1 + tg2 ® |
||||||||||
Другий головний напрямок, очевидно, визнача¹ться вектором ~j 0(¡ sin ®; cos ®). |
|
|||||||||||||||
|
Формули повороту системи координат навколо початку координат на кут ® мають такий |
|||||||||||||||
âèä: |
|
|
|
|
|
x = x0 cos ® ¡ y0 sin ®; |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
y = x0 sin ® + y0 cos ®: |
|
|
|
(1.154) |
|||||
Пiдставивши значення x; y згiдно формул (1.154) в рiвняння (1.148), ми отрима¹мо рiвняння лiнi¨ ° в системi координат Ox0y0:
a110 x02 + a220 y02 + 2a100 x0 + 2a200 y0 + a000 = 0; 27 |
(1.155) |
коефiцi¹нти якого знаходяться за такими формулами:
a011 = a11 cos2 ® + 2a12 cos ® sin ® + a22 sin2 ®; a022 = a11 sin2 ® ¡ 2a12 sin ® cos ® + a22 cos2 ®; a010 = a10 cos ® + a20 sin ®;
a020 = ¡a10 sin ® + a20 cos ®;
a000 = a00:
(1.156)
(1.157)
(1.158)
(1.159)
(1.160)
Виходячи з системи (1.150) формули (1.156) i (1.157) можна записати бiльш компактно, а саме:
a011 = a11 cos2 ® + 2a12 cos ® sin ® + a22 sin2 ® =
=(a11 cos ® + a12 sin ®) cos ® + (a21 cos ® + a22 sin ®) sin ® =
=¸1 cos2 ® + ¸1 sin2 ® = ¸1:
Îòæå, a110 |
= ¸1. Аналогiчно доводимо, що |
a220 = ¸2. Таким чином, |
рiвняння (1.155) |
|||||
перепишеться так: |
¸1x02 + ¸2y02 + 2a0 x0 |
+ 2a0 |
y0 |
+ a0 |
= 0; |
(1.161) |
||
|
|
|
||||||
|
|
|
10 |
20 |
|
00 |
|
|
äå a100 |
, a200 |
знаходяться за формулами (1.158), (1.159). |
|
|
|
|
||
З рiвняння (1.161) шляхом перенесення початку координат в деяку точку O 0 отриму¹мо канонiчне рiвняння лiнi¨ °. ßêùî ° не ¹ параболою, то O 0 центр (або один з центрiв) лiнi¨ °; ÿêùî æ ° парабола, то O 0 ¨¨ вершина.
Таким чином, для того щоб звести рiвняння (1.148) лiнi¨ ° другого порядку до канонiчного виду i побудувати графiк, необхiдно виконати такi дi¨:
1. |
Знайти коренi характеристичного рiвняння (1.152). |
2. |
Знайти координати векторiв ~i 0(cos ®; sin ®) i ~j 0(¡ sin ®; cos ®) за формулами (1.153), |
|
попередньо знайшовши tg ®. |
0 , оскiльки вектор ~ 0 ма¹ головний напрямок (див. стор. 89). 27Êîåôiöi¹íò a12 = 0 j
92

3.Обчислити коефiцi¹нти a010, a020 за формулами (1.158), (1.159) i записати рiвняння лiнi¨ ° у виглядi (1.161).
4.Перенесенням початку координат отримати канонiчне рiвняння лiнi¨ °.
5. Побудувати систему координат O 0~i 0~j 0 |
за координатами точки O 0 |
i векторiв ~i 0, ~j 0, à |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
потiм побудувати точки лiнi¨ ° в системi O 0~i 0~j 0 |
за канонiчним рiвнянням. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Приклад. Звести до канонiчного виду загальне рiвняння лiнi¨ другого порядку |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
5x2 + 8xy + 5y2 ¡ p |
|
|
x + p |
|
|
|
|
y ¡ 8 = 0: |
|
|
|
(1.162) |
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
2 |
2 |
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
Розв'язання. Розв'яжемо характеристичне рiвняння |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
¯ |
|
|
|
4 |
|
|
|
|
5 |
¡ |
¸ ¯ = 0: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
¯ |
|
5 ¡ ¸ |
|
|
|
|
¯ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
¯ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
¯ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Ìà¹ìî |
(5 |
|
|
¸) |
2 |
|
|
, çâiäêè |
¸ |
2¯ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
¯, à òîìó |
¸1 |
= 1 |
i |
¸2 |
= 9 |
¹ коренi цього |
||||||||||||||||||||||||
|
¡ |
|
¡ |
16 = 0 |
|
|
|
|
|
¯ |
|
|
|
10¸ + 9 = 0¯ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
¡ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
|||||||
рiвняння. Отже, tg ® = |
¸1 ¡ 5 |
|
= |
|
1 ¡ 5 |
= |
¡ |
1, звiдки згiдно (1.153) отриму¹мо cos ® = |
2 |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
p |
|
|
|
|
|
|
4 |
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 , |
||||||||
sin ® = ¡ |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
. Таким чином, ма¹мо |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
2 |
|
|
|
|
|
22!; |
|
|
|
|
|
|
|
~j 0 Ã 22; |
22! |
: |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
~i 0 Ã 22; ¡ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
Обчислити коефiцi¹нти a100 |
, a200 |
|
p |
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
за формулами (1.158), (1.159): |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
a100 |
= ¡ |
|
|
22 ¢ |
|
22 |
+ |
|
|
22 á 22! = ¡1; |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
p |
|
|
|
|
|
|
p |
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
a200 |
= |
2 |
|
á |
|
|
2 |
! + |
|
2 |
|
¢ |
2 |
= 0: |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
2 |
2 |
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
Таким чином в системi координат O 0~i 0~j 0 |
рiвняння (1.162) запишеться так: |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x02 + 9y02 ¡ 2x0 ¡ 8 = 0: |
|
|
|
|
|
|
|
(1.163) |
||||||||||||||||||||||||||||||||||||||
Перепишемо рiвняння (1.163), видiливши при x0; y0 повнi квадрати: |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(x0 ¡ 1)2 + 9y02 = 9: |
|
|
|
|
|
|
|
(1.164) |
|||||||||||||||||||||||||||||||||||||
Позначивши X = x0 ¡ 1 i Y = y0 |
|
рiвняння (1.164) матиме вигляд X2 + 9Y 2 ¡ 9 = 0,28 тобто |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X |
2 |
|
+ |
|
Y 2 |
= 1; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
а це ¹ канонiчне рiвняння елiпса з напiвосями a = 3; b = 1. Вектори~i 0 i ~j 0 |
задають напрямки |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
~ 0~ 0
îñåé CX òà CY системи координат Ci j , äå C(1; 0) точка площини. Графiк даного елiпса матиме такий вигляд:
28Це означа¹, що ми виконали паралельне перенесення початку координат O 0 в точку C(1; 0). Таким чином,
~ 0~ 0.
ми отримали рiвняння дано¨ лiнi¨ в системi координат Ci j
93

5x2 + 8xy + 5y2 ¡ p2 x + p2 y ¡ 8 = 0:
94

Ðîçäië 2
Геометрiя в просторi: площини, прямi лiнi¨, поверхнi другого порядку
2.1Метод координат в просторi. Мiшаний та векторний добутки векторiв
1 Координати точок в просторi
Афiнна система координат в просторi. Координати точки в просторi. Дiлення вiдрiзка в заданому вiдношеннi. Прямокутна система координат в просторi. Довжина вiдрiзка.
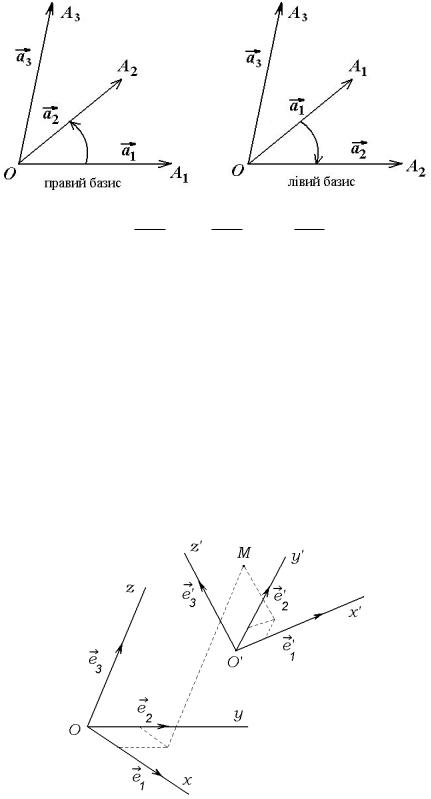
Координатна система в просторi вводиться по аналогi¨ з системою координат на площинi (див. стор. 20). Вiзьмемо деяку точку O i довiльний базис ~e1; ~e2; ~e3 простору. Четвiрка,
яка склада¹ться з точки O i базиса ~e1; ~e2; ~e3 назива¹ться афiнною системою координат
в просторi i познача¹ться символом O~e1~e2~e3 |
àáî (O;~e1;~e2;~e3). Точку O |
будемо називати |
||||||||||
початком |
|
координат, |
|
à |
вектори |
~e1 |
; ~e2; ~e3 |
|
||||
|
|
|
||||||||||
|
|
координатними |
векторами. |
Напрямленi |
||||||||
|
|
прямi, що проходять через початок координат |
||||||||||
|
|
i паралельнi координатним векторам, на яких |
||||||||||
|
|
напрямки |
визначаються |
öèìè |
векторами, |
|||||||
|
|
називаються координатними вiсями. Вiсi, якi |
||||||||||
|
|
паралельнi |
векторам ~e1 |
; ~e2 |
; ~e3 називаються |
|||||||
|
|
вiдповiдно вiссю абсцис, ординат, аплiкат i |
||||||||||
|
|
позначаються так: Ox, Oy, Oz. Площини, якi |
||||||||||
|
|
визначаються вiсями Ox i Oy, Ox i Oz, Oy i |
||||||||||
|
|
Oz називаються |
координатними |
площинами |
||||||||
|
|
i позначаються вiдповiдно через Oxy, Oxz, |
||||||||||
|
|
Oyz. Iнколи систему координат O~e1~e2~e3 ìè |
||||||||||
|
|
позначатимемо через Oxyz. |
|
|
|
|||||||
|
|
à |
Нехай O~e1~e2~e3 афiнна система координат, |
|||||||||
|
|
|
довiльна точка простору. Вектор |
OM |
||||||||
|
|
|
M |
|
|
|
|
|
|
|
|
¡¡! |
назива¹ться радiус-вектором точки |
M |
. Координати |
x; y; z |
вектора OM |
в базисi ~e ; ~e ; ~e |
|||||||
|
|
|
|
|
¡¡! |
|
1 |
2 3 |
||||
називаються координатами точки M |
в системi координат O~e1~e2~e3. Число x |
назива¹ться |
||||||||||
абсцисою, y ординатою, а z аплiкатою точки M, при цьому пишуть: M(x; y; z). Таким чином, координатами точки M в системi координат O~e1~e2~e3 називаються числа x; y; z òàêi,
95

ùî |
¡¡! |
= |
|
1 |
+ |
|
2 |
+ 3 |
(2.1) |
OM |
|
x~e |
|
|
y~e |
|
z~e : |
Дiлення вiдрiзка в заданому вiдношеннi в просторi визнача¹ться так саме, як i для випадку площини (див. означення 1.13), тому ми скориста¹мося мiркуваннями наведеними на сторiнцi 22. Отже, нехай в афiннiй системi координат ~e1; ~e2; ~e3 заданi точки сво¨ми
координатами: M1(x1; y1; z1), M2(x2; y2; z2), M(x; y; z), причому точка M дiлить направлений вiдрiзок M1M2 у вiдношеннi ¸. Тодi, як вiдмiчалось на сторiнцi 22, буде мати мiсце рiвнiсть
¡¡! |
1 |
¡¡! |
¡¡! |
(2.2) |
|
OM = |
|
|
(OM1 |
+¸ OM2); |
|
1 + ¸ |
|||||
звiдки отриму¹мо афiннi координати точки подiлу M:
x = |
x1 + ¸x2 |
; |
y = |
y1 + ¸y2 |
; |
z = |
z1 + ¸z2 |
: |
(2.3) |
|
|
|
|||||||
1 + ¸ |
|
1 + ¸ |
|
1 + ¸ |
|
|
|||
Якщо точка M дiлить даний вiдрiзок пополам, то ¸ = 1, а тому отриманi формули
запишуться так: |
|
|
|
|
x1 + x2 |
|
|
y1 + y2 |
|
|
|
z1 + z2 |
|
|
|
|
||||||||||
|
|
|
|
|
|
x = |
; |
y = |
; |
z = |
: |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|||
|
Система координат назива¹ться прямокутною декартовою, якщо базис цi¹¨ системи ¹ |
|||||||||||||||||||||||||
ортонормованим. Така система координат з початком в точцi |
O |
познача¹ться через |
~~ ~ |
|||||||||||||||||||||||
àáî |
~ ~ |
~ |
, äå ~2 |
|
~ 2 |
|
~ |
2 |
|
|
|
i ~~ |
~~ |
~ ~ |
|
|
|
|
|
|
|
Oi j k |
||||
|
|
|
|
|
|
. Нехай в прямокутнiй системi |
||||||||||||||||||||
|
(O; i; j; k) |
|
i |
= j |
= k |
= 1 |
i j = i k = j k = 0 |
|
|
|
|
|
|
|
|
|
|
|||||||||
координат |
~~ ~ |
точки |
M1 |
i |
M2 |
мають координати |
M1(x1; y1; z1) |
, |
M2(x2 |
, тодi вiдстань |
||||||||||||||||
|
|
Oi j k |
|
|
|
|
|
|
|
|
|
|
; y2; z2) |
|
||||||||||||
мiж ними знаходиться за формулою: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
M1M2 = p |
|
: |
|
(2.4) |
||||||||||||||||
|
|
|
|
|
|
(x2 ¡ x1)2 + (y2 ¡ y1)2 + (z2 ¡ z1)2 |
|
|||||||||||||||||||
2 Орi¹нтацiя простору
Ознака компланарностi трьох векторiв в координатнiй формi. Матриця переходу вiд одного базиса до iншого. Властивостi визначникiв матриць переходу. Вiдношення однаково¨ орi¹нтовностi базисiв. Орi¹нтацiя векторного простору. Правий i лiвий базиси в просторi.
Доведемо теорему про ознаку компланарностi трьох векторiв, заданих координатами.
, ~
Теорема 2.1. Для того щоб вектори ~a(a1; a2; a3) b(b1; b2; b3) i ~c(c1; c2; c3), якi заданi координатами в довiльному базисi ~e1, ~e2, ~e3, були компланарними, необхiдно i достатньо,
щоб виконувалась рiвнiсть: |
¯ |
|
|
|
|
|
|
¯ |
|
|
|
a1 |
b1 |
c1 |
|
|
|||||
|
a2 |
b2 |
c2 |
= 0: |
(2.5) |
|||||
|
¯ |
a |
3 |
b |
3 |
c |
3 |
¯ |
|
|
|
¯ |
|
|
|
¯ |
|
|
|||
|
¯ |
|
|
|
|
|
|
¯ |
|
|
|
¯ |
|
|
|
|
|
|
¯ |
|
|
|
¯ |
|
|
|
|
|
|
¯ |
|
|
~
Доведення. Нехай вектори ~a; b;~c компланарнi, тодi за теоремою 1.6 про лiнiйну залежнiсть
трьох векторiв робимо висновок, що данi вектори лiнiйно залежнi. Це означа¹, що знайдуться такi числа ®; ¯; °, одночасно не рiвнi нулевi, такi, що
~ |
~ |
(2.6) |
®~a + ¯b + °~c = 0: |
|
|
96